Andurite klassifikatsioon ja nende otstarve. Mittekontaktsed andurid: ülevaade, tööpõhimõte, eesmärk. Puutelüliti Millised on kõigi andurite kaks tööpõhimõtet
Kõigepealt on vaja teha vahet mõistete "sensor" ja "sensor" vahel. Anduri all mõistetakse traditsiooniliselt seadet, mis on võimeline teisendama mis tahes füüsilise suuruse sisendtoimingu sobivaks signaaliks edasine kasutamine. Tänapäeval on kaasaegsetele anduritele mitmeid nõudeid:
- Väljundväärtuse ühemõtteline sõltuvus sisendist.
- Stabiilsed näidud olenemata kasutusajast.
- Kõrge tundlikkus.
- väike suurus ja väike mass.
- Anduri mõju puudumine juhitavale protsessile.
- Võimalus sisse töötada erinevaid tingimusi.
- Ühilduvus teiste seadmetega.
Iga andur sisaldab järgmisi elemente: tundlik element ja signaalseade. Mõnel juhul saab lisada võimendi ja signaalivalija, kuid sageli pole nende järele vajadust. Anduri komponendid määravad selle edasise tööpõhimõtte. Sel hetkel, kui vaatlusobjektis toimuvad muutused, fikseeritakse need tundliku elemendiga. Vahetult pärast seda kuvatakse muudatused signaalseadmel, mille andmed on objektiivsed ja informatiivsed, kuid neid ei saa automaatselt töödelda.
Riis. 22.
Lihtsaima anduri näide on elavhõbedatermomeeter. Tundliku elemendina kasutatakse elavhõbedat, temperatuuriskaala toimib signaaliseadmena ja temperatuur on vaatlusobjektiks. Oluline on mõista, et anduri näidud on andmete kogum, mitte teave. Neid ei salvestata välis- ega sisemällu ning need ei sobi automatiseeritud töötlemiseks, salvestamiseks ja edastamiseks.
Kõik erinevate poolt kasutatavad andurid tehnoloogilised lahendused asjade internetist saab jagada mitmesse kategooriasse. Ühe mugavaima klassifikatsiooni aluseks on seadmete eesmärk "3:
- kohaloleku- ja liikumisandurid;
- asendi-, nihke- ja tasemeandurid;
- kiirus- ja kiirendusandurid;
- jõu- ja puuteandurid;
- Rõhuandurid;
- voolumõõturid;
- akustilised andurid;
- niiskusandurid;
- valgusdetektorid;
- temperatuuriandurid;
- keemilised ja bioloogilised andurid.
Andurite töö on väga erinev andurite tööst. Kõigepealt on vaja peatuda mõiste "sensor" määratlusel. Andur on seade, mis on võimeline muutma vaatlusobjektis toimunud muutused edasiseks salvestamiseks, töötlemiseks ja edastamiseks sobivaks infosignaaliks.
Anduri tööskeem on lähedane anduri ahela karakteristikule. Teatud mõttes võib andurit tõlgendada täiustatud andurina, kuna selle struktuuri saab väljendada kui "anduri komponendid" + "teabetöötlusüksus". Anduri funktsionaalne skeem on järgmine.

Riis. 23.
Samal ajal on andurite klassifikatsioon eesmärgi järgi samaväärne andurite klassifikatsiooniga. Sageli saavad andurid ja andurid sama objekti puhul mõõta sama väärtust, kuid andurid kuvavad andmed ja andurid muudavad need ka infosignaaliks.
Lisaks on olemas spetsiaalne anduritüüp, mida on asjade Interneti mõiste mõistmiseks mõttekas arvestada. Need on nn "nutikad" andurid, mille funktsionaalset diagrammi täiendavad kogutud teabe esmase töötlemise algoritmid. Seega on tavaline andur võimeline töötlema andmeid ja andma neid teabe kujul, samas kui "nutikas" on võimeline sooritama mis tahes toiminguid väliskeskkonnast ise püütud teabega.
Tulevikus on oodata 3D-andurite tõsist arengut, mis suudavad suure täpsusega skaneerida ümbritsevat ruumi ja ehitada selle virtuaalset mudelit. Seega suudab Capri 3D andur hetkel määrata inimeste liikumist ja nende meetrilisi omadusi.
teristics. Lisaks suudab see andur skannida keskkonnas olevat objekti ja salvestada info SAE-faili edasiseks printimiseks 3D-printeris.

Riis. 24. Samsung Nexus 10-ga ühendatud Capri 3D-andur
Erilist tähelepanu väärib mitut andurit korraga ühendavate seadmete väljatöötamine. erinevat tüüpi. Nagu punktis 2.2.1 mainitud, nõuavad teadmised teavet selle kohta erinevad omadused objektiks. Ja erinevate andurite kasutamine võimaldab saada vajalikku infot. Teatud mõttes suudavad sellised seadmed inimesi tegelikult ära tunda. Sellise seadme näiteks on tänapäevastes videomängudes kasutatav juhtmeta kontroller Kinekt.
IR-emitter värviandur

Mikrofoni massiiv
Riis. 25. Kinekt 57 juhtmevaba kontrolleri disain
Kinekti kontroller sisaldab korraga mitut komponenti: infrapunakiirgur; infrapuna vastuvõtja; värvikaamera;
4 mikrofoni ja helisignaali protsessori komplekt; kaldekorrektor.
Klpeki kontrolleri tööpõhimõte! piisavalt lihtne. Infrapunakiirgust väljuvad kiired peegelduvad ja sisenevad infrapuna vastuvõtjasse. Tänu sellele on võimalik saada infot videomängu mängiva inimese ruumilise asendi kohta. Kaamera on võimeline jäädvustama erinevaid värviandmeid ning mikrofonid suudavad vastu võtta mängija häälkäsklusi. Tänu sellele suudab kontroller koguda inimese kohta piisavalt infot, et ta saaks mängu juhtida liigutuste või häälkäskluste abil.
Mõnes mõttes Kteci kontroller! kuulub asjade interneti tehnoloogiate valdkonda. Ta suudab mängija tuvastada, koguda tema kohta teavet ja edastada seda teistele seadmetele (mängukonsool). Kuid sellist andurite komplekti saab potentsiaalselt kasutada asjade Interneti kontseptsiooni jaoks teistes paljutõotavates valdkondades, sealhulgas nutikate kodutehnoloogiate kasutuselevõtul.
Kuni eelmise sajandi 70. aastani oli iga auto varustatud maksimaalselt kolme anduriga: kütusetase, jahutusvedeliku temperatuur ja õlirõhk. Need olid ühendatud armatuurlaua magnetoelektriliste ja valgusindikaatoritega. Nende eesmärk oli vaid teavitada juhti mootori parameetritest ja kütusekogusest. Siis oli autoandurite seade väga lihtne.
Kuid aeg läks ja sama sajandi 70ndatel hakkasid autotootjad sisu vähendama kahjulikud ained nende autokonveieritelt väljuvates heitgaasides. Selleks vajalikud autoandurid ei andnud juhile enam midagi teada, vaid edastasid ainult infot mootori töö kohta. Nende koguarv igas autos on oluliselt suurenenud. Järgmist kümnendit iseloomustas võitlus masinate kasutamise ohutuse eest, mille jaoks kavandati uued andurid. Need olid ette nähtud mitteblokeeruva pidurisüsteemi tööks ja turvapatjade rakendumiseks liiklusõnnetuste ajal.
ABS
See süsteem on loodud selleks, et vältida rataste täielikku blokeerimist pidurdamisel. Seetõttu sisaldab seade tingimata ratta kiiruse andureid. Nende kujundused on erinevad. Nad on kas passiivsed või aktiivsed.
- Passiivsed on enamasti induktiivsed andurid. Andur ise koosneb terassüdamikust ja õhukese emailitud vasktraadi suure hulga keerdudega mähist. Oma funktsioonide täitmiseks surutakse rattaveo või rummu külge terasest hammasrattarõngas. Ja andur on fikseeritud nii, et ratta pöörlemisel liiguvad hambad südamiku lähedalt ja kutsuvad mähisesse elektrilisi impulsse. Nende kordussagedus on ratta pöörlemiskiiruse proportsionaalne väljend. Seda tüüpi seadmete eelised on: lihtsus, võimsuse puudumine ja madal hind. Nende puuduseks on impulsi amplituud liiga väike kiirusel kuni 7 km/h.
- Aktiivsed, mida on kahte tüüpi. Mõned põhinevad tuntud Halli efektil. Teised on magnetoresistiivsed, mis põhinevad samanimelisel nähtusel. Magnetoresistiivne efekt seisneb pooljuhi elektrilise takistuse muutmises, kui see siseneb magnetvälja. Mõlemat tüüpi aktiivseid andureid iseloomustab piisav impulsside amplituud mis tahes kiirusel. Kuid nende seade on keerulisem ja hind on suurem kui passiivsetel. Ja seda, et nad vajavad toitu, ei saa nimetada eeliseks.
Määrimissüsteem
Selle süsteemi parameetreid kontrollivaid autoandureid on kolme tüüpi:

Mootori jahutus
Karburaatormootoriga auto oli varustatud kahe temperatuurianduriga. Üks sisaldas elektrilist radiaatori ventilaatorit töötemperatuuri hoidmiseks. Kuvaseade võttis teiselt näidud. Kaasaegse elektroonilise mootori juhtseadmega (ECU) varustatud auto jahutussüsteemil on ka kaks temperatuuriandurit. Üks neist kasutab jahutusvedeliku temperatuuri näidiku seadet näidikuplokis. ECU tööks on vaja teist temperatuuriandurit. Nende struktuur on põhimõtteliselt erinev. Mõlemad on NTC termistorid. See tähendab, et nende takistus väheneb temperatuuri langedes.
sisselasketrakt
- Õhu massivooluandur (DMRV). Mõeldud silindritesse siseneva õhu mahu määramiseks. See on vajalik kütuse koguse arvutamiseks, et moodustada tasakaalustatud õhu-kütuse segu. Sõlm koosneb neitsi plaatina niitidest, mille kaudu elektrit. Üks neist on mootorisse sisenevas õhuvoolus. Teine, referent, on temast eemal. Neid läbivaid voolusid võrreldakse ECU-s. Nende erinevus määrab mootorisse siseneva õhu mahu. Mõnikord võetakse suurema täpsuse huvides arvesse õhutemperatuuri.
- Sisselaskekollektori absoluutrõhuandur, mida nimetatakse ka MAP-anduriks. Kasutatakse silindritesse siseneva õhu mahu määramiseks. See võib olla alternatiiv DMRV-le turboülelaaduriga mootorite jaoks. Seade koosneb korpusest ja keraamilisest diafragmast, mis on kaetud tensoresisiivse kilega. Kere maht jagatakse diafragma abil kaheks osaks. Üks neist suletakse ja õhk pumbatakse sellest välja. Teine on toru kaudu ühendatud sisselaskekollektoriga, seega on rõhk selles võrdne mootorisse sisestatud õhu rõhuga. Selle rõhu mõjul membraan deformeerub, mis muudab sellel oleva kile takistust. See takistus iseloomustab absoluutset õhurõhku kollektoris.
- Drosselklapi asendiandur (TPS). Annab signaali, mis on proportsionaalne õhuklapi avanemisnurgaga. See on sisuliselt muutuv takisti. Selle fikseeritud kontaktid on ühendatud maandusega ja võrdluspingega. Ja teisaldatavast, mehaaniliselt drosselklapi teljega ühendatud, eemaldatakse väljundpinge.
Väljalaskesüsteem
Hapnikuandur. See seade mängib tagasiside rolli, et säilitada soovitud õhu ja kütuse suhe põlemiskambrites. Selle töö põhineb tahke elektrolüüdiga galvaanilise elemendi tööpõhimõttel. Viimane on tsirkooniumdioksiidil põhinev keraamika. Konstruktsioonielektroodid on plaatina sadestamine mõlemal pool keraamikat. Seade hakkab tööle pärast soojenemist temperatuurini 300–400 ◦ C.
Soojenemine nii kõrgele temperatuurile toimub tavaliselt kuumade heitgaaside või kütteelement. Sellised temperatuuri režiim vajalik keraamilise elektrolüüdi juhtivuse tekkimiseks. Põlemata kütuse olemasolu mootori heitgaasis on põhjus, miks anduri elektroodidel ilmneb potentsiaalide erinevus. Vaatamata sellele, et kõik on harjunud seda seadet hapnikuanduriks nimetama, on see pigem põlemata kütuseandur. Kuna väljundsignaali ilmumine tekib siis, kui selle pind puutub kokku mitte hapniku, vaid kütuseauruga.
Muud andurid

Elektrotehnika entsüklopeedia nr 16.
Andurid
Andurite klassifikatsioon, põhinõuded neile
Erinevate tehnoloogiliste protsesside automatiseerimine, erinevate sõlmede, masinate, mehhanismide tõhus juhtimine nõuab arvukalt erinevate mõõtmiste tegemist. füüsikalised kogused.
Andurid(kirjanduses nimetatakse sageli ka mõõtemuunduriteks) või teisisõnu, andurid on paljude automaatikasüsteemide elemendid - nende abiga saavad nad teavet juhitava süsteemi või seadme parameetrite kohta.
Andur - see on mõõte-, signaalimis-, reguleerimis- või juhtseadme element, mis muundab juhitava väärtuse (temperatuur, rõhk, sagedus, valgustugevus, elektripinge, vool jne) mõõtmiseks, edastamiseks, salvestamiseks, töötlemiseks mugavaks signaaliks. , registreerimist ja mõnikord ka nende mõjutamiseks kontrollitud protsessidele. Või lihtsam andur on seade, mis muudab mis tahes füüsilise suuruse sisendtoimingu signaaliks, mis on mugav edasiseks kasutamiseks.
Kasutatavad andurid on väga mitmekesised ja võivad olla
klassifitseeritakse erinevate kriteeriumide järgi:Olenevalt sisend (mõõdetud) koguse tüübist eristada: mehaaniliste nihete andureid (lineaarne ja nurk), pneumaatilisi, elektrilisi, voolumõõtureid, kiiruse, kiirenduse, jõu, temperatuuri, rõhu jne andureid.
Praegu on tööstuses erinevate füüsikaliste suuruste mõõtmiste osakaalu jaotus ligikaudu järgmine: temperatuur - 50%, vool (mass ja maht) - 15%, rõhk - 10%, tase - 5%, kogus (mass, maht) ) - 5%, aeg - 4%, elektrilised ja magnetilised kogused - alla 4%.
Väljundväärtuse tüübi järgi, milleks sisendväärtus teisendatakse , eristama mitteelektriline Ja elektriline: alalisvooluandurid (EMF või pinge), vahelduvvoolu amplituudiandurid (EMF või pinge), vahelduvvoolu sagedusandurid (EMF või pinge), takistusandurid (aktiivsed, induktiivsed või mahtuvuslikud) jne.
Enamik andureid on elektrilised. See on tingitud järgmistest elektrimõõtmiste eelistest:
Elektrilisi koguseid on mugav edastada vahemaa tagant ja ülekanne toimub suurel kiirusel;
Elektrilised suurused on universaalsed selles mõttes, et kõiki teisi suurusi saab teisendada elektrilisteks suurusteks ja vastupidi;
Need on täpselt teisendatud digitaalseks koodiks ja võimaldavad saavutada mõõtevahendite suurt täpsust, tundlikkust ja kiirust.
Vastavalt tegevuspõhimõttele Andurid võib jagada kahte klassi: genereerivad Ja parameetriline(andurid-modulaatorid). Generaatori andurid muudavad sisendväärtuse otse elektrisignaaliks.
Parameetrilised andurid muudavad sisendväärtuse mõne elektrilise parameetri muutuseks ( R , L või C ).
Vastavalt tegevuspõhimõttele andureid saab jagada ka oomilisteks, reostaatilisteks, fotoelektrilisteks (optoelektroonilisteks), induktiivseteks, mahtuvuslikeks jne.
Andureid on kolme klassi:
Analoogandurid, st andurid, mis toodavad analoogsignaali võrdeliselt sisendväärtuse muutumisega;
Digitaalsed andurid, mis genereerivad impulssjada või kahendsõna;
Binaarsed (binaarsed) andurid, mis genereerivad ainult kahe taseme signaali: "sisse / välja" (teisisõnu, 0 või 1); on nende lihtsuse tõttu laialdaselt kasutusel.
Nõuded anduritele :
Väljundväärtuse ühemõtteline sõltuvus sisendist;
Omaduste stabiilsus ajas;
Kõrge tundlikkus;
Väike suurus ja kaal;
Tagasiside puudumine juhitava protsessi ja juhitava parameetri kohta;
Töötada erinevates töötingimustes;
- erinevaid valikuid paigaldus.
Parameetrilised andurid (sensormodulaatorid) sisendväärtus X muundatakse mõne elektrilise parameetri muutuseks ( R, L või C ) andur. Loetletud andurite parameetrite muutust on võimatu edastada ilma energiat kandva signaalita (pinge või vool) kaugelt. Anduri vastava parameetri muutust on võimalik tuvastada ainult anduri reaktsiooni järgi voolule või pingele, kuna loetletud parameetrid iseloomustavad seda reaktsiooni. Seetõttu nõuavad parameetrilised andurid spetsiaalsete mõõteahelate kasutamist, mis töötavad alalis- või vahelduvvooluga.
Ohmilised (takistuslikud) andurid - tööpõhimõte põhineb nende aktiivse takistuse muutumisel koos pikkuse muutumisega l, ristlõikepindala Svõi takistus lk:
R= pl /S
Lisaks kasutatakse aktiivse takistuse väärtuse sõltuvust kontaktrõhust ja fotoelementide valgustusest. Vastavalt sellele jagunevad oomilised andurid: kontakt, potentsiomeetriline (reostaatiline), deformatsioonitakistus, termistor, fototakisti.
Kontaktandurid - See lihtsaim vorm takistiandurid, mis muudavad primaarelemendi liikumise takistuse hüppeks elektriahel. Kontaktandurite abil mõõdavad ja juhivad nad jõude, nihkeid, temperatuuri, objektide suurusi, juhivad nende kuju jne. Kontaktandurite hulka kuuluvad reisida Ja Piirlülitid, kontakttermomeetrid ja nn elektroodide andurid, mida kasutatakse peamiselt elektrit juhtivate vedelike piirtasemete mõõtmiseks.
Kontaktandurid võivad töötada nii alalis- kui ka vahelduvvoolul. Olenevalt mõõtepiiridest võivad kontaktandurid olla ühe- ja mitmepiirilised. Viimaseid kasutatakse takisti osade mõõtmiseks, mis erinevad oluliselt R, mis kuuluvad elektriahelasse, on järjestikku lühistatud.
Kontaktandurite puuduseks on pideva jälgimise keerukus ja kontaktsüsteemi piiratud kasutusiga. Kuid nende andurite äärmise lihtsuse tõttu kasutatakse neid automatiseerimissüsteemides laialdaselt.
Reostaatilised andurid on muutuva takistusega takisti. Anduri sisendväärtus on kontakti liikumine ja väljundväärtus on selle takistuse muutus. Liikuv kontakt on mehaaniliselt ühendatud objektiga, mille nihet (nurk- või lineaarne) tahetakse teisendada.
Levinuim on reostaatanduri sisselülitamiseks mõeldud potentsiomeetriline ahel, milles reostaat lülitatakse sisse pingejaguri ahela järgi. Tuletame meelde, et pingejagur on elektriseade alalis- või vahelduvpinge jagamiseks osadeks; pingejagur võimaldab eemaldada (kasutada) ainult osa olemasolevast pingest läbi takistitest, kondensaatoritest või induktiivpoolidest koosneva elektriskeemi elementide. Pingejaguri ahela järgi ühendatud muutuvat takistit nimetatakse potentsiomeetriks.
Tavaliselt kasutatakse reostaatandureid mehaanilises mõõteriistad nende näidud teisendada elektrilisteks suurusteks (vool või pinge), näiteks vedelike ujuktaseme mõõturites, mitmesugustes manomeetrites jne.
Lihtsa reostaadi kujul olevat andurit ei kasutata peaaegu kunagi selle staatilise karakteristiku olulise mittelineaarsuse tõttu. I n \u003d f (x), kus I n- koormusvool.
Sellise anduri väljundväärtuseks on pingelangus Sa välja liikuva ja ühe fikseeritud kontakti vahel. Väljundpinge sõltuvus kontakti nihkest x U välja \u003d f(x) vastab takistuse muutumise seadusele piki potentsiomeetrit. Takistuse jaotumise seadus piki potentsiomeetri pikkust, mille määrab selle konstruktsioon, võib olla lineaarne või mittelineaarne.
Potentsiomeetrilisi andureid, mis on struktuurselt muutuvtakistid, valmistatakse erinevatest materjalidest - mähisjuhtmest, metallkiledest, pooljuhtidest jne.
Tensomõõturid (pingeandurid) kasutatakse mehaaniliste pingete, väikeste deformatsioonide, vibratsiooni mõõtmiseks. Tensomõõturite toime põhineb tensorefektil, mis seisneb juhtide ja pooljuhtmaterjalide aktiivtakistuse muutmises neile rakendatavate jõudude mõjul.
Termomeetrilised andurid (termistorid) - takistus sõltub temperatuurist. Termistoreid kasutatakse anduritena kahel viisil:
1) Termistori temperatuuri määrab keskkond; termistorit läbiv vool on nii väike, et see ei soojenda termistorit. Sellises olukorras kasutatakse termistorit temperatuuriandurina ja seda nimetatakse sageli "takistustermomeetriks".
2) Termistori temperatuuri määrab konstantse voolu ja jahutustingimuste kuumenemisaste. Sel juhul määravad kindlaksmääratud temperatuuri termistori pinna soojusülekande tingimused (keskkonna - gaasi või vedeliku - kiirus termistori suhtes, selle tihedus, viskoossus ja temperatuur), seega saab termistorit kasutada voolukiiruse, keskkonna soojusjuhtivuse, gaasitiheduse jne andur. Seda tüüpi andurites toimub justkui kaheastmeline transformatsioon: mõõdetud väärtus teisendatakse esmalt termistori temperatuuri muutuseks, mis seejärel teisendatakse takistuse muutuseks.
Termistorid on valmistatud nii puhastest metallidest kui ka pooljuhtidest.Materjalil, millest sellised andurid valmistatakse, peab olema kõrge temperatuuritakistustegur, võimalusel takistuse lineaarne sõltuvus temperatuurist, omaduste hea reprodutseeritavus ja inertsus keskkonnamõjude suhtes. Kõige suuremal määral rahuldab plaatina kõiki neid omadusi; veidi väiksemas - vask ja nikkel.
Võrreldes metalltermistoritega on pooljuhttermistorid (termistorid) suurema tundlikkusega.
Induktiivsed andurid on mõeldud kontaktivabaks teabe hankimiseks masinate, mehhanismide, robotite jne töökehade liikumise kohta. ja selle teabe teisendamine elektrisignaaliks.
Induktiivse anduri tööpõhimõte põhineb magnetahela mähise induktiivsuse muutumisel, sõltuvalt magnetahela üksikute elementide (ankur, südamik jne) asendist. Sellistes andurites lineaarne või nurkliikumine X(sisendkogus) teisendatakse induktiivsuse muutuseks ( L) andur. Neid kasutatakse nurk- ja lineaarnihkete, deformatsioonide, mõõtmete kontrolli jms mõõtmiseks.
Lihtsamal juhul on induktiivne andur magnetahelaga induktiivpool, mille liikuv element (armatuur) liigub mõõdetud väärtuse toimel.
Induktiivne andur tunneb ära kõik juhtivad objektid ja reageerib neile vastavalt. Induktiivne andur on kontaktivaba, ei vaja mehaanilist toimet, töötab kontaktivabalt, muutes elektromagnetvälja.
Eelised
- puudub mehaaniline kulumine, pole kontakti tõrkeid
- kontakti põrkamata ja valepositiivsed tulemused
- kõrge lülitussagedus kuni 3000 Hz
- vastupidav mehaanilisele pingele
Puudused - suhteliselt madal tundlikkus, induktiivse takistuse sõltuvus toitepinge sagedusest, anduri märkimisväärne tagasiside mõõdetud väärtusele (armatuuri tõmbamise tõttu südamikule).
Mahtuvuslikud andurid - tööpõhimõte põhineb kondensaatori elektrilise mahtuvuse sõltuvusel selle plaatide mõõtmetest, plaatide suhtelisest asendist ja nendevahelise keskkonna dielektrilisest konstandist.
Kahe plaadiga lamekondensaatori elektriline mahtuvus määratakse järgmise avaldise abil:
C \u003d e 0 e S /h
Kus e 0- dielektriline konstant; e- söötme suhteline läbitavus plaatide vahel; S- plaatide aktiivne ala; hon kondensaatori plaatide vaheline kaugus.
Sõltuvused C(S) Ja C(h) kasutatakse mehaaniliste liikumiste muutmiseks mahtuvuse muutuseks.
Mahtuvuslikud ja ka induktiivsed andurid saavad toite vahelduvpingega (tavaliselt suurendatud sagedusega - kuni kümneid megahertsi). Mõõteahelatena kasutatakse tavaliselt sildahelaid ja resonantsahelaid kasutavaid ahelaid. Viimasel juhul kasutatakse reeglina generaatori võnkesageduse sõltuvust resonantsahela mahtuvusest, s.o. anduril on sagedusväljund.
Mahtuvusandurite eelisteks on lihtsus, kõrge tundlikkus ja madal inerts. Puudused - väliste elektriväljade mõju, mõõteseadmete suhteline keerukus.
Mahtuvusandureid kasutatakse nurknihkete, väga väikeste lineaarnihkete, vibratsioonide, liikumiskiiruste jms mõõtmiseks, samuti määratud funktsioonide (harmooniline, saehammas, ristkülikukujuline jne) taasesitamiseks.
Mahtuvuslikud muundurid, läbilaskvuse mis muutub dielektriku liikumise, deformatsiooni või koostise muutumise tõttu, kasutatakse nivooanduritena mittejuhtivate vedelike, puiste- ja pulbermaterjalide, mittejuhtivate materjalide kihi paksuse (paksusmõõturid), samuti aine niiskuse ja koostise jälgimine.
Andurid – generaatorid
Generaatori andurid teostada sisendväärtuse otsene teisendamine X elektrisignaaliks. Sellised andurid muudavad sisend (mõõdetud) suuruse allika energia koheselt elektriliseks signaaliks, s.t. need on justkui elektrigeneraatorid (sellest ka selliste andurite nimi – genereerivad elektrisignaali).
Täiendavad toiteallikad selliste andurite tööks pole põhimõtteliselt vajalikud (sellegipoolest võib anduri väljundsignaali võimendamiseks, teist tüüpi signaalideks teisendamiseks ja muudel eesmärkidel vaja minna lisavõimsust). Generaatorid on termoelektrilised, piesoelektrilised, induktsioon-, fotoelektrilised ja palju muud tüüpi andurid.
Induktiivsed andurid mõõdetud mitteelektriline suurus teisendatakse induktsiooni EMF-iks. Andurite tööpõhimõte põhineb elektromagnetilise induktsiooni seadusel. Nende andurite hulka kuuluvad alalis- ja vahelduvvoolu tahhogeneraatorid, mis on väikesed elektrimasina generaatorid, mille väljundpinge on võrdeline generaatori võlli pöörlemise nurkkiirusega. Anduritena kasutatakse tahhogeneraatoreid nurkkiirus.
Tahhogeneraator on generaatorrežiimis töötav elektrimasin. Sel juhul on tekitatud EMF võrdeline pöörlemiskiiruse ja magnetvoo suurusega. Lisaks muutub pöörlemiskiiruse muutumisega ka EMF-i sagedus. Neid kasutatakse kiirusanduritena (kiirus).
temperatuuriandurid. Kaasaegses tööstuslik tootmine levinumad on temperatuuri mõõtmised (näiteks keskmise suurusega tuumajaamas on selliseid mõõtmisi umbes 1500 punktis ja suures keemiatööstuse ettevõttes üle 20 tuhande). Mõõdetavate temperatuuride lai valik, mitmesugused mõõtevahendite kasutustingimused ja neile esitatavad nõuded määravad ära kasutatavate temperatuurimõõtevahendite mitmekesisuse.
Kui arvestada tööstuslike rakenduste temperatuuriandureid, siis saame eristada nende põhiklasse: räni temperatuuriandurid, bimetalliandurid, vedeliku- ja gaasi termomeetrid, termoindikaatorid, termistorid, termopaarid, takistustermopaarid, infrapunaandurid.
Ränist temperatuuriandurid kasutada pooljuhträni takistuse sõltuvust temperatuurist. Mõõdetavate temperatuuride vahemik on -50…+150 0 C . Neid kasutatakse peamiselt temperatuuri mõõtmiseks elektroonikaseadmetes.
Bimetallsensor valmistatud kahest erinevast omavahel kinnitatud metallplaadist. Erinevatel metallidel on erinevad soojuspaisumistegurid. Kui plaadiga ühendatud metalle kuumutatakse või jahutatakse, paindub see elektrikontakte sulgedes (avades) või näidiku noolt liigutades. Bimetallandurite tööpiirkond -40…+550 0 C. Kasutatakse pinna mõõtmiseks tahked ained ja vedeliku temperatuurid. Peamised kasutusvaldkonnad on autotööstus, kütte- ja veeküttesüsteemid.
Soojusnäitajad - Need on spetsiaalsed ained, mis muudavad oma värvi temperatuuri mõjul. Värvuse muutus võib olla pöörduv või pöördumatu. Neid toodetakse kilede kujul.
Takistuse soojusmuundurid
Takistustermopaaride (termistoride) tööpõhimõte põhineb juhtide ja pooljuhtide elektritakistuse muutumisel sõltuvalt temperatuurist (räägitud varem).
Plaatinatermistorid on ette nähtud temperatuuri mõõtmiseks vahemikus -260 kuni 1100 0 C. Praktikas kasutatakse laialdaselt odavamaid vasktermistoreid, mille takistus sõltub temperatuurist lineaarselt.
Vase puuduseks on madal eritakistus ja kerge oksüdeerumine kõrgetel temperatuuridel, mille tulemusena on vase takistustermomeetrite kasutamise lõpppiir piiratud temperatuuriga 180 0 C. Karakteristikute stabiilsuse ja reprodutseeritavuse poolest on vasktermistorid plaatina termistorid halvemad. Niklit kasutatakse odavates andurites toatemperatuurivahemikus mõõtmiseks.
Pooljuhttermistorid (termistorid) on negatiivse või positiivse temperatuuriga takistuse koefitsiendiga, mille väärtus temperatuuril 20 0 C on (2 ... 8) * 10 -2 (0 C) -1, s.o. suurusjärgu võrra suurem kui vasel ja plaatinal. Väga väikeste mõõtmetega pooljuhttermistoritel on kõrge takistusväärtus (kuni 1 MΩ). pooljuhina. Materjalina kasutatakse metallioksiide: KMT tüüpi pooljuhttermistoreid - koobalti ja mangaani oksiidide segu ning MMT - vase ja mangaani oksiide.
Pooljuhtide temperatuurianduritel on aja jooksul suur omaduste stabiilsus ja neid kasutatakse temperatuuride muutmiseks vahemikus -100 kuni 200 0 С.
Termoelektrilised muundurid (termopaarid) - lk Termopaaride tööpõhimõte põhineb termoelektrilisel efektil, mis seisneb selles, et kahe erineva metalli või pooljuhi ristmike (ristmike) temperatuuride erinevuse olemasolul tekib ahelas elektromotoorjõud, mida nimetatakse termoelektromootorjõuks (lühendatult termo-EMF). Teatud temperatuurivahemikus võime eeldada, et termo-EMF on otseselt võrdeline temperatuuride erinevusega∆T\u003d T 1 - T 0 ristmiku ja termopaari otste vahel.
Termopaari omavahel ühendatud otsad, mis on sukeldatud keskkonda, mille temperatuuri mõõdetakse, nimetatakse termopaari tööotsaks. Sees olevad otsad keskkond, ja mis on tavaliselt juhtmetega ühendatud mõõteahelaga, nimetatakse vabadeks otsteks. Nende otste temperatuur tuleb hoida konstantsena. Nendel tingimustel sõltub termo-EMF E t ainult temperatuurist T1töötav ots.
U välja \u003d E t \u003d C ( T 1 - T 0) ,
kus C on termopaari juhtmete materjalist sõltuv koefitsient.
Termopaaride tekitatud EMF on suhteliselt väike: see ei ületa 8 mV iga 100 0 C kohta ega ületa tavaliselt absoluutväärtuses 70 mV. Termopaarid võimaldavad mõõta temperatuuri vahemikus -200 kuni 2200 0 С.
Plaatina, plaatina-roodiumi, kroomi ja alumeli kasutatakse kõige laialdasemalt termoelektriliste muundurite tootmiseks.
Termopaaridel on järgmised omadused eeliseid: valmistamise lihtsus ja töökindlus, madal hind, puudustoiteallikad ja võimalus mõõta laias temperatuurivahemikus.
Koos sellega iseloomustavad termopaare ka mõned vead- termistoridest madalam mõõtetäpsus, olulise termilise inertsi olemasolu, vabade otste temperatuuri korrigeerimise vajadus ja spetsiaalsete ühendusjuhtmete kasutamise vajadus.
Infrapunaandurid (püromeetrid) - kasutada kuumutatud kehade kiirgusenergiat, mis võimaldab mõõta pinna temperatuuri distantsilt. Püromeetrid jagunevad kiirguseks, heleduseks ja värviks.
Kiirguspüromeetritega mõõdetakse temperatuure vahemikus 20 kuni 2500 0 C ning seade mõõdab reaalse objekti integraalset kiirgusintensiivsust.
Heleduse (optilisi) püromeetreid kasutatakse temperatuuride mõõtmiseks vahemikus 500 kuni 4000 0 C. Need põhinevad uuritava objekti heleduse spektri kitsas osas võrdlusel eeskujuliku emitteri (fotomeetrilise lambi) heledusega.
Värvipüromeetrid põhinevad kiirguse intensiivsuse suhte mõõtmisel kahel lainepikkusel, mis tavaliselt valitakse spektri punases või sinises osas; neid kasutatakse temperatuuride mõõtmiseks vahemikus 800 0 C.
Püromeetrid mõõdavad temperatuuri sisendis raskesti ligipääsetavad kohad ja liikuvate objektide temperatuur, kõrged temperatuurid kus teised andurid enam ei tööta.
Temperatuuride mõõtmiseks vahemikus -80 kuni 250 0 С kasutatakse sageli niinimetatud kvartssoojusmuundureid, kasutades kvartselemendi omasageduse sõltuvust temperatuurist. Nende andurite töö põhineb asjaolul, et muunduri sageduse sõltuvus temperatuurist ja teisendusfunktsiooni lineaarsus muutuvad sõltuvalt lõike orientatsioonist kvartskristalli telgede suhtes. Neid andureid kasutatakse laialdaselt digitaalsetes termomeetrites.
Piesoelektrilised andurid
Piesoelektriliste andurite toime põhineb piesoelektrilise efekti (piesoelektrilise efekti) kasutamisel, mis seisneb selles, et mõne kristalli kokkusurumisel või venitamisel tekib nende pinnale elektrilaeng, mille suurus on võrdeline mõjuga. jõudu.
Piesoelektriline efekt on pöörduv, st rakendatud pinge põhjustab piesoelektrilise näidise deformatsiooni - selle kokkusurumist või venitamist, vastavalt rakendatud pinge märgile. Seda nähtust, mida nimetatakse pöördpiesoelektriliseks efektiks, kasutatakse heli- ja ultrahelisageduste akustiliste vibratsioonide ergutamiseks ja vastuvõtmiseks.
Kasutatakse jõudude, rõhu, vibratsiooni jms mõõtmiseks.
Optilised (fotoelektrilised) andurid
Eristama analoog Ja diskreetne optilised andurid. Analoogandurite puhul muutub väljundsignaal proportsionaalselt ümbritseva valgusega. Peamine kasutusvaldkond on automatiseeritud valgustuse juhtimissüsteemid.
Diskreetset tüüpi andurid muudavad valgustuse seatud väärtuse saavutamisel väljundi oleku vastupidiseks.
Fotoelektrilisi andureid saab rakendada peaaegu kõigis tööstusharudes. Diskreetseid tegevusandureid kasutatakse omamoodi läheduslülititena loendamiseks, tuvastamiseks, positsioneerimiseks ja muudeks ülesanneteks mis tahes tehnoloogilisel liinil.
, registreerib valgusvoo muutuse kontrollitavas piirkonnas , mis on seotud mehhanismide ja masinate mis tahes liikuvate osade asukoha muutumisega ruumis, objektide puudumise või olemasoluga. Tänu suurtele tajumiskaugustele optilised lähedusandurid leidnud laialdast rakendust tööstuses ja mitte ainult.
Optiline lähedusandur koosneb kahest funktsionaalsest üksusest, vastuvõtjast ja emitterist. Neid sõlme saab teha nii samas korpuses kui ka erinevates korpustes.
Objekti tuvastamise meetodi järgi jagatakse fotoandurid 4 rühma:
1) tala ristumine- selle meetodi puhul on saatja ja vastuvõtja eraldatud erinevatesse korpustesse, mis võimaldab need paigaldada üksteise vastas töökaugusele. Tööpõhimõte põhineb sellel, et saatja saadab pidevalt valguskiire, mille vastuvõtja võtab vastu. Kui anduri valgussignaal seiskub kolmanda osapoole objektiga kattumise tõttu, reageerib vastuvõtja kohe, muutes väljundi olekut.
2) peegeldus helkurilt- selle meetodi puhul on anduri vastuvõtja ja saatja samas korpuses. Anduri vastas on paigaldatud reflektor (reflektor). Reflektorandurid on konstrueeritud nii, et tänu polariseerivale filtrile tajuvad nad peegeldust ainult helkurilt. Need on helkurid, mis töötavad topeltpeegelduse põhimõttel. Sobiva helkuri valiku määrab vajalik kaugus ja kinnitusvõimalused.
Saatja poolt saadetud valgussignaal peegeldub reflektorilt ja siseneb anduri vastuvõtjasse. Kui valgussignaal lakkab, reageerib vastuvõtja kohe, muutes väljundi olekut.
3) peegeldus objektilt- selle meetodi puhul on anduri vastuvõtja ja saatja samas korpuses. Anduri tööoleku ajal muutuvad kõik selle tööpiirkonda sattunud objektid omamoodi helkuriteks. Niipea, kui objektilt peegeldunud valguskiir tabab anduri vastuvõtjat, reageerib see kohe, muutes väljundi olekut.
4) fikseeritud objekti peegeldus - anduri tööpõhimõte on sama, mis "objektilt peegeldumisel", kuid tundlikum objektile kohandamisest kõrvalekallete suhtes. Näiteks on võimalik tuvastada keefiripudelil paisunud kork, vaakumpakendi mittetäielik täitumine toodetega jne.
Eesmärgi järgi jagunevad fotoandurid kahte põhirühma: üldkasutatavad andurid ja eriandurid. Spetsiaalsete andurite hulka kuuluvad andurite tüübid, mis on mõeldud kitsama hulga ülesannete lahendamiseks. Näiteks värvimärgi tuvastamine objektil, kontrastse äärise tuvastamine, sildi olemasolu läbipaistval pakendil jne.
Anduri ülesanne on tuvastada objekt kaugelt. See kaugus varieerub vahemikus 0,3–50 m, sõltuvalt valitud anduri tüübist ja tuvastamismeetodist.
Mikrolaineandurid
Nupp-relee konsoolid asendatakse mikroprotsessoripõhiste automaatjuhtimissüsteemidega tehnoloogiline protsess Kõrgeima jõudluse ja töökindlusega (APCS) on andurid varustatud digitaalsete sideliidestega, kuid see ei too alati kaasa süsteemi üldise töökindluse ja selle töökindluse suurenemist. Põhjus on selles, et enamuse tööpõhimõtted tuntud tüübid andurid seavad ranged piirangud nende kasutustingimustele.
Näiteks kasutatakse tööstuslike mehhanismide kiiruse jälgimiseks laialdaselt mittekontaktseid (mahtuvuslikke ja induktiivseid), aga ka tahhogeneraatori kiiruse reguleerimise seadmeid (UKS). Tahhogeneraatoril UKS on mehaaniline ühendus liikuva objektiga ning mittekontaktsete seadmete tundlikkustsoon ei ületa paari sentimeetrit.
Kõik see mitte ainult ei tekita ebamugavusi andurite paigaldamisel, vaid raskendab oluliselt ka nende seadmete kasutamist tolmu korral, mis kleepub tööpindadele ja põhjustab valehäireid. Loetletud andurite tüübid ei ole võimelised objekti (näiteks konveierilint) otseselt juhtima – need on häälestatud rullikute, tiivikute, pingutustrumlite jms liikumisele. Mõne seadme väljundsignaalid on nii nõrgad, et alla võimsate elektrimasinate tööst tulenevate tööstuslike häirete taseme.
Sarnased raskused tekivad traditsiooniliste tasemeandurite - lahtise toote olemasolu andurite - kasutamisel. Sellised seadmed on vajalikud tooraine tarnimise õigeaegseks katkestamiseks tootmismahutitesse. Valehäireid ei põhjusta mitte ainult kleepumine ja tolm, vaid ka tootevoo puudutamine, kui see punkrisse siseneb. Kütmata ruumides mõjutab andurite tööd ümbritseva õhu temperatuur. Valehäired põhjustavad laadimise sagedasi seiskamisi ja käivitusi tehnoloogilised seadmed- selle õnnetuste peamine põhjus, mis põhjustab ummistusi, konveierite purunemist, tulekahju ja plahvatusohtu.
Need probleemid viisid mitu aastat tagasi põhimõtteliselt uut tüüpi seadmete väljatöötamiseni - kiiruse reguleerimise radar-, liikumis- ja tagasivooluandurid, mille töö põhineb juhitava objekti koostoimel raadiosignaaliga, mille sagedus on umbes 10 10 Hz.
Mikrolainemeetodite kasutamine tehnoloogiliste seadmete seisukorra jälgimiseks võimaldab täielikult vabaneda traditsiooniliste andurite tüüpide puudustest.
Iseloomulikud tunnused need seadmed on:
Mehaanilise ja elektrilise kontakti puudumine objektiga (keskkonnaga), kaugus sensorist objektini võib olla mitu meetrit;
Objekti (konveierilint, kett) otsene juhtimine, mitte nende ajamid, pingutustrumlid jne;
Madal energiatarve;
Tundmatus toote kleepumise suhtes pikkade töövahemaade tõttu;
Kõrge mürakindlus ja tegevuse suunatus;
Ühekordne reguleerimine kogu kasutusaja jooksul;
Kõrge töökindlus, ohutus, ioniseeriva kiirguse puudumine.
Anduri tööpõhimõte põhineb liikuvalt objektilt peegelduva raadiosignaali sageduse muutumisel. See nähtus ( "Doppleri efekt") kasutatakse laialdaselt radarisüsteemides kiiruse kaugmõõtmiseks. Liikuv objekt põhjustab elektrilise signaali ilmumise mikrolaine transiiveri mooduli väljundisse.
Kuna signaali tase sõltub peegelduva objekti omadustest, saab liikumisandurite abil anda märku avatud vooluringist (lindist), mis tahes objektide või materjalide olemasolust konveierilindil. Teibil on sile pind ja madal peegeldusvõime. Kui toode hakkab liikuma mööda konveieri tööharu kohale paigaldatud andurist, suurendades peegelduskoefitsienti, annab seade liikumisest märku, st tegelikult, et lint pole tühi. Väljundimpulsi kestuse järgi saab hinnata märkimisväärsel kaugusel liigutatavate objektide suurust, teha valikuid jne.
Kui on vaja täita mõni anum (punkrist šahtini), saate täpselt määrata täitmise lõpetamise hetke - teatud sügavusele langetatud andur näitab täiteaine liikumist kuni selle täitmiseni.
Konkreetsed näited Mikrolaine liikumisandurite kasutamise erinevates tööstusharudes määrab selle eripära, kuid üldiselt suudavad need lahendada väga erinevaid seadmete tõrgeteta töötamise probleeme ja tõsta automatiseeritud juhtimissüsteemide infosisu.
Kasutatud allikate loetelu
1) E.M. Gordin, Yu.Sh. Mitnik, V.A. Tarlyn
Automatiseerimise ja arvutitehnoloogia alused
Moskva "Insenerid", 1978
2) Gustav Olsson, Gianguido Piani
Digitaalsed automaatika- ja juhtimissüsteemid
Peterburi: Nevski murre, 2001
3) V.V.Sazonov Juhised rakendamiseks laboritööd
"Reostaatilise lineaarse nihke anduri uurimine"
4) Tšugainov N.G. Abstraktne "Temperatuuriandur", Krasnojarsk 2003
5) Fedosov A. V. Kokkuvõte "Kiirusandurid" - Moskva 2003
6) D. N. Shestakov, PromRadar LLC peadirektor
Mikrolaineandurid tööstuslikeks rakendusteks
7) Ajakiri "Modern Electronics" 6, 2006
8) Ettevõtte "Andur" kataloog
9) OMRONi komponendid / fotoandurid
Artikli autor : Sergei Nikulin, EE Gomeli Riikliku Polütehnikumi õppejõud kolledž " .- need on andurid, mis töötavad ilma füüsilise ja mehaanilise kontaktita. Need töötavad läbi elektri- ja magnetvälja ning laialdaselt kasutatakse ka optilisi andureid. Selles artiklis analüüsime kõiki kolme tüüpi andureid: optilist, mahtuvuslikku ja induktiivset ning lõpus teeme katse induktiivse anduriga. Muide, rahvas kutsub ka kontaktivabasid andureid läheduslülitid, seega ärge kartke, kui näete sellist nime ;-).
optiline andur
Niisiis, paar sõna optiliste andurite kohta ... Optiliste andurite tööpõhimõte on näidatud alloleval joonisel
barjäär
Kas mäletate mõnda kaadrit filmidest, kus peategelased pidid läbima optilisi kiiri ega tabanud ühtegi neist? Kui kiirt puudutas mõni kehaosa, käivitus häire.

Kiirt kiirgab mingi allikas. Ja seal on ka “kiire vastuvõtja” ehk siis asi, mis kiirt vastu võtab. Niipea, kui kiire vastuvõtjal pole kiirt, lülitub selles kohe sisse või välja kontakt, mis juhib otse häiret või midagi muud teie äranägemise järgi. Põhimõtteliselt on kiire allikas ja vastuvõtja, mida õigesti nimetatakse "fotodetektoriks", paaris.
SKB IS optilised liikumisandurid on Venemaal väga populaarsed.


Seda tüüpi anduritel on nii valgusallikas kui ka fotodetektor. Need asuvad otse nende andurite korpuses. Iga anduritüüp on terviklik disain ja seda kasutatakse paljudes masinates, kus on vaja suuremat töötlemistäpsust kuni 1 mikromeetrini. Põhimõtteliselt on need süsteemiga masinad H loogiline P tarkvara Kell laud ( CNC), mis töötavad programmi järgi ja nõuavad minimaalset inimese sekkumist. Need mittekontaktsed andurid on ehitatud sellel põhimõttel

Seda tüüpi andurid tähistatakse tähega "T" ja neid nimetatakse barjääriks. Niipea kui optiline kiir katkes, andur töötas.
Plussid:
- ulatus võib ulatuda kuni 150 meetrini
- kõrge töökindlus ja mürakindlus
Miinused:
- pikkade tuvastuskauguste korral on vajalik fotodetektori peenreguleerimine vastavalt optilisele kiirele.
Refleks
Andurite peegeldav tüüp on tähistatud tähega R. Seda tüüpi andurite puhul asuvad emitter ja vastuvõtja samas korpuses.

Tööpõhimõte on näha alloleval joonisel.

Emitteri valgus peegeldub mõnelt reflektorilt (reflektorilt) ja siseneb vastuvõtjasse. Niipea, kui kiirte katkestab mõni objekt, käivitub andur. See andur on konveieriliinidel toodete loendamisel väga mugav.
difusioon
Ja viimast tüüpi optilised andurid - difusioon - tähistatakse tähega D. Need võivad välja näha erinevad:


Tööpõhimõte on sama, mis refleksil, kuid siin peegeldub valgus juba objektidelt. Sellised andurid on mõeldud väikese tajumiskauguse jaoks ja on oma töös tagasihoidlikud.

Mahtuvuslikud ja induktiivsed andurid
Optika on optika, kuid induktiivseid ja mahtuvuslikke andureid peetakse nende töös kõige tagasihoidlikumateks ja väga töökindlateks. Need näevad välja sellised

Nad on üksteisega väga sarnased. Nende tööpõhimõte on seotud magnetilise ja elektriväli. Induktiivsed andurid käivituvad, kui neile tuuakse metalli. Nad ei “noki” teistele materjalidele. Mahtuvuslikud töötavad peaaegu iga ainega.
Kuidas induktiivne andur töötab
Nagu öeldakse, parem üks kord näha kui sada korda kuulda, nii et teeme väikese katse induktiivne andur.
Niisiis, meie külaline on Venemaal toodetud induktiivne andur

Loeme, mis sellel kirjas on
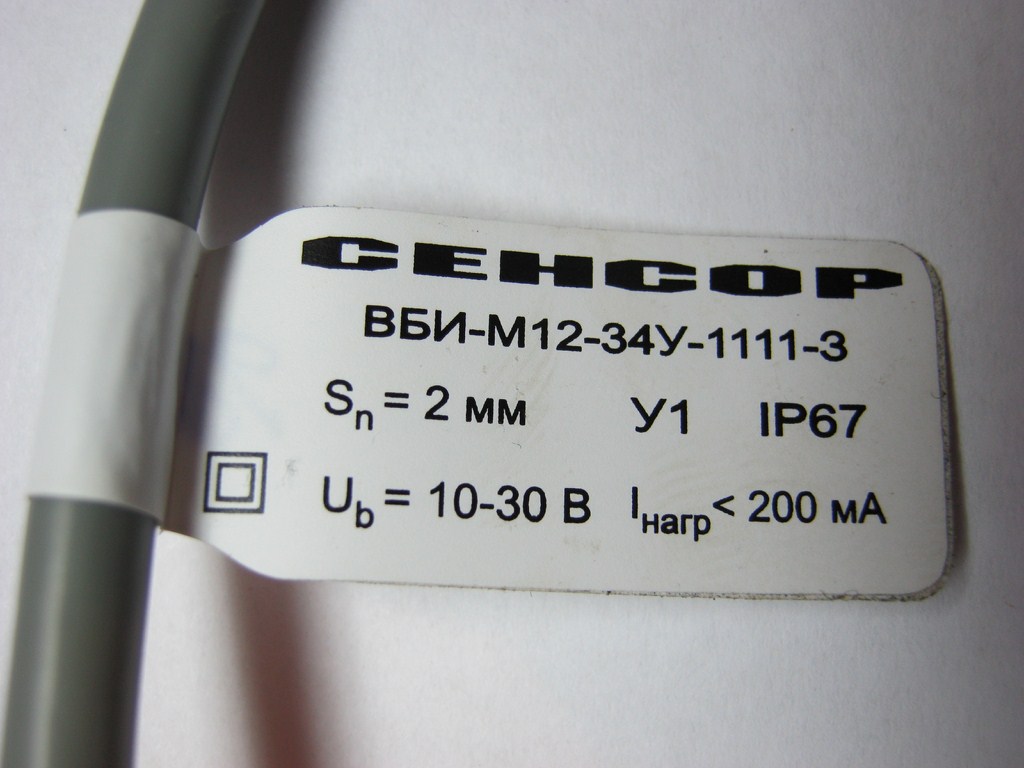
WBI anduri kaubamärk bla-bla-bla-bla, S - tundlikkuse kaugus, siin on see 2 mm, U1 - versioon parasvöötme jaoks, IP - 67 - kaitsetase(lühidalt, siinne kaitsetase on väga järsk), U b - pinge, mille juures andur töötab, siin võib pinge olla vahemikus 10 kuni 30 volti, Ma laadin - laadin voolu, see andur suudab koormusele anda kuni 200 milliamprit voolu, minu arvates on see korralik.
Sildi tagaküljel on selle anduri ühendusskeem.

Noh, hindame anduri tööd? Selleks klammerdume koorma külge. Meie koormus on LED, mis on jadamisi ühendatud takistiga nimiväärtusega 1 kOhm. Miks me vajame takistit? LED hakkab kaasamise hetkel meeletult voolu sööma ja põleb läbi. Selle vältimiseks asetatakse LED-iga järjestikku takisti.

Anduri pruunil juhtmel anname toiteallikast plussi ja sinisele juhtmele - miinuse. Pinge, mille võtsin, oli 15 volti.
Tõe hetk on saabumas ... Toome selleni tööpiirkond andur on metallist objekt ja andur töötab kohe, nagu andurisse ehitatud LED meile ütleb, nagu ka meie eksperimentaalne LED.

Andur ei reageeri muudele materjalidele peale metallide. Kampolipurk ei tähenda talle midagi :-).

LED-i asemel saab kasutada loogikalülituse sisendit ehk andur väljastab käivitamisel loogika ühe signaali, mida saab kasutada digiseadmetes.
Järeldus
Elektroonikamaailmas kasutatakse neid kolme tüüpi andureid üha enam. Igal aastal nende andurite tootmine kasvab ja kasvab. Neid kasutatakse täiesti erinevates tööstusvaldkondades. Automaatika ja robootika poleks nende anduriteta võimalikud. Selles artiklis olen analüüsinud ainult kõige lihtsamaid andureid, mis annavad meile ainult "sisse-välja" signaali või professionaalses keeles öeldes natuke teavet. Keerulisemat tüüpi andurid võivad pakkuda erinevaid parameetreid ja isegi ühendada otse arvutite ja muude seadmetega.
Ostke induktiivne andur
Meie raadiopoes maksavad induktiivsed andurid 5 korda rohkem kui Hiinast Aliexpressist tellides.

Siin Saate vaadata mitmesuguseid induktiivseid andureid.
Andurite tüübid ja nende nimetused määratakse erinevate ultraheliandurite ja nendes kasutatavate skaneerimismeetodite järgi. Sõltuvalt muunduri tüübist saame eristada:
● valdkondlikud mehaanilised andurid(sektori mehaaniline sond) - ühe- või mitmeelemendiliste rõngakujuliste restidega;
● mitmeelemendiliste lineaarmassiividega lineaarsed andurid;
● kumerad ja mikrokumerad andurid(kumer või mikrokumer sond) - vastavalt kumerate ja mikrokumerate restidega;
● faasilised sektoriandurid(faasilise massiivi sond) - mitmeelemendiliste lineaarsete massiividega;
● kahemõõtmelised võreandurid th, lineaarne, kumer ja sektor.
Siin oleme nimetanud peamised andurite tüübid, täpsustamata nende meditsiinilist eesmärki, töösagedust ja disainifunktsioone.
Sektoraalsetes mehaanilistes andurites (joonis 2.11 a, 2.11 b) sulgeb tööpind (kaitsekork) ruumala, milles piki nurka liigub üheelemendiline või rõngas-ultrahelimuundur. Korgi all olev maht on täidetud akustiliselt läbipaistva vedelikuga, et vähendada kadusid ultrahelisignaalide läbimisel. Sektoraalsete mehaaniliste andurite põhiomaduseks on lisaks töösagedusele skaneerimissektori nurga suurus, mis on näidatud anduri märgistuses (mõnikord on lisaks antud ka tööpinna vastava kaare H pikkus). Märgistusnäide: 3,5 MHz/90°.
Lineaarsetes, kumerates, mikrokumerates ja faasilistes (sektor) elektroonilistes skaneerimisandurites kattub tööpind anduri kiirgava pinnaga, mida nimetatakse nn. ava, ja on sellega võrdne. Anduri märgistamisel kasutatakse iseloomulikke ava suurusi ja need aitavad anduri valimisel määrata.
Lineaarandurite puhul on iseloomulik ava pikkus L (joonis 2.11 c), kuna see määrab ristkülikukujulise vaateala laiuse. Lineaarse anduri 7,5 MHz / 42 mm märgistamise näide.
Tuleb meeles pidada, et lineaaranduri vaatevälja laius on alati väiksem kui 20-40% ava pikkusest. Seega, kui ava suurus on 42 mm, ei ole vaatevälja laius suurem kui 34 mm.
Kumerandurites määravad vaatevälja kaks iseloomulikku mõõdet - kumerale tööosale vastava kaare H pikkus (mõnikord ka selle kõõl) ja skaneerimissektori nurga suurus α joonisel 2.11 d Näide kumera anduri märgistamiseks: 3,5 MHz / 60 ° / 60 mm. Harvemini kasutate märgistamiseks raadiust R tööpinna kumerus, näiteks:
3,5 MHz/60 R(raadius - 60 mm).
Riis. 2.11. Peamised andurite tüübid väliseks uurimiseks: a, b-
sektor mehaaniline (a - kardioloogiline, b - veega
otsik); c - lineaarne elektrooniline; d - kumer;
e - mikrokumer; e - etapiviisiline sektor
Mikrokumerandurites on iseloomulik R - tööpinna (ava) kõverusraadius, mõnikord on lisaks antud kaare nurk α, mis määrab vaatesektori nurga suuruse (joon. 2.11,e). Märgistusnäide: 3,5 MHz/20R (raadius - 20 mm).
Faasisektori anduri puhul on elektroonilise skaneerimissektori nurga suurus antud kraadides. Märgistusnäide: 3,5 MHz/90° .
Joonisel fig. Väliseks uurimiseks kasutatakse 2.11 andureid. Lisaks neile on olemas suur hulk intrakavitaarseid ja kõrgelt spetsialiseerunud andureid.
Soovitatav on kehtestada andurite klassifikatsioon meditsiinilise kasutusvaldkonna järgi.
1. Universaalsed andurid väliuuringuteks(kõhusond). Täiskasvanute ja laste kõhupiirkonna ja vaagnaelundite uurimiseks kasutatakse universaalseid andureid.
2. Pindmiste elundite andurid(väikeste osade sond). Neid kasutatakse madalate väikeste elundite ja struktuuride (nt kilpnääre, perifeersed veresooned, liigesed) uurimiseks.
3. Südame andurid(südamesond). Südame uurimiseks kasutatakse sektoritüüpi andureid, mis on seotud roietevahelise pilu kaudu toimuva vaatluse eripäraga. Kasutatakse mehaanilisi skaneerivaid andureid (üheelemendilisi või rõngakujulise massiiviga) ja faasilisi elektroonilisi andureid.
4. Pediaatria andurid(podiaatrilised sondid). Pediaatrias kasutatakse samu andureid, mis täiskasvanutel. , kuid ainult kõrgema sagedusega (5 või 7,5 MHz), mis võimaldab teil saada rohkem kõrge kvaliteet pilte. See on võimalik patsientide väiksuse tõttu.
5. Intrakavitaarsed andurid(intrakavitaarsed sondid). On olemas suur valik intrakavitaarseid andureid, mis erinevad üksteisest meditsiinilise kasutuse poolest.
● Transvaginaalsed (intravaginaalsed) andurid (transvaginaalne või edovaginaalne sond).
● Transrektaalsed andurid (transrektaalne või endorektaalne sond).
● Intraoperatiivsed andurid (operatsioonisisene sond).
● Transuretraalsed andurid (transuretraalsed sondid).
● Transösofageaalsed sondid.
● Intravaskulaarsed andurid (intravaskulaarsed sondid).
6. Biopsia või punktsioonisondid(biopsia või punktsioonisondid). Kasutatakse biopsia või punktsiooninõelte täpseks juhtimiseks. Selleks on spetsiaalselt konstrueeritud andurid, milles nõel saab läbida tööpinna (ava) ava (või pilu).
7. Väga spetsialiseerunud andurid. Enamikul ülalmainitud anduritest on üsna lai kasutusala. Samas saab eraldi välja tuua kitsa kasutusega andurite rühma ja need tuleks eraldi välja tuua.
● Oftalmoloogilised andurid (oftatmoloogilised sondid).
● Transkraniaalsete uuringute andurid (transkraniaalsed sondid).
● Andurid põskkoopapõletiku, otsmiku põskkoopapõletiku ja põskkoopapõletiku diagnoosimiseks.
● Veterinaarmeditsiini andurid (veterinaarsondid).
8. Lairiba ja mitme sagedusega andurid. Kaasaegsetes keerukates seadmetes kasutatakse lairibaandureid üha enam. Need andurid on ehituselt sarnaselt eelpool käsitletud tavapäraste anduritega ja erinevad neist selle poolest, et kasutavad lairiba ultrahelimuundurit, s.t. laia töösagedusribaga andur.
9. Doppleri andurid. Andureid kasutatakse ainult selleks, et saada teavet verevoolu kiiruse või vahemiku kohta veresoontes. Neid andureid käsitletakse Doppleri ultraheliinstrumentide osades.
10. 3D-pildiandurid. Spetsiaalseid andureid 3D (kolmemõõtmeliste) piltide saamiseks kasutatakse harva. Tavalisi kahemõõtmelisi pildisensoreid kasutatakse sagedamini koos spetsiaalsete seadmetega, mis tagavad skannimise piki kolmandat koordinaati.
Saadud info kvaliteet sõltub seadme tehnilisest tasemest – mida keerulisem ja täiuslikum seade, seda kvaliteetsem on diagnostikainfo. Reeglina poolt tehniline tase seadmed jagunevad nelja rühma: lihtsad seadmed; keskklassi seadmed; kõrgklassi seadmed; tipptasemel seadmed (mõnikord nimetatakse seda tipptasemel).
Ultraheli diagnostikaseadmete tootjate ja kasutajate seas puuduvad kokkulepitud kriteeriumid seadmete klassi hindamiseks, kuna on väga palju omadusi ja parameetreid, mille järgi seadmeid omavahel võrrelda. Sellegipoolest on võimalik hinnata seadmete keerukuse taset, millest sõltub suuresti saadava teabe kvaliteet. Üks peamisi tehnilisi parameetreid, mis määrab ultraheliskanneri keerukuse taseme, on maksimaalne vastuvõtu- ja edastuskanalite arv seadme elektroonilises üksuses, kuna rohkem numbrit kanaleid, seda parem on tundlikkus ja eraldusvõime - ultrahelipildi kvaliteedi peamised omadused.
Lihtsates (tavaliselt kaasaskantavates) ultraheliskännerites ei ole edastus-vastuvõtukanalite arv üle 16, kesk- ja kõrgema klassi seadmetes 32, 48 ja 64. Kõrgklassi seadmetes saab kanalite arvu suurendada. rohkem kui 64, näiteks 128, 256, 512 ja isegi rohkem. Reeglina on tipptasemel ja täiustatud ultraheliskannerid värvilise Doppleri kaardistusega seadmed.
Tipptasemel seadmed kasutavad tavaliselt kõiki kaasaegseid funktsioone digitaalne töötlemine signaale, alustades peaaegu andurite väljundist. Sel põhjusel nimetatakse selliseid seadmeid digitaalsüsteemideks või platvormideks (digitaalsüsteem).
Kontrollküsimused
1. Mis on akustiline impedants ja selle mõju peegeldusele
ultraheli?
2. Kuidas sõltub sagedusest ultraheli nõrgenemine bioloogilistes kudedes?
3. Kuidas muutub impulss-ultraheli signaali spekter sügavusega?
4. Millised töörežiimid on ette nähtud ultraheliskannerites?
5. Mis on töörežiim IN?
6. Mis on töörežiim A?
7. Mis on töörežiim M?
8. Mis on töörežiim D?
9. Selgitage ultrahelianduri tööd.
10. Millistes konfiguratsioonides piesoelektrilisi elemente leidub erinevat tüüpi
andurid?
11. Mis tüüpi andureid on ultraheliskannerites?