Kuidas valida asünkroonse mootori sagedusmuundurit. Vaatame koos kolmefaasilise elektrimootori sageduslüliti eesmärki. Mis on sagedusmuundurid
Sagedusmuunduri valimine
Sagedusmuunduri karakteristikute määramisel antud koormuse jaoks tuleb kõigepealt arvestada koormuse karakteristikutega. Nõutavate väljundparameetrite arvutamiseks on neli erinevat meetodit, kusjuures meetodi valik sõltub elektrimootori omadustest.
Koormusomadused
Enne sagedusmuunduri suuruse määramist on vaja eristada kahte enim kasutatavat koormust. Koormusomadused erinevad üksteisest järgmiselt:
Riis. 1. Konstantne ja ruutkoormusmoment
Kui tsentrifugaalpumpade ja ventilaatorite kiirus suureneb, suureneb energiatarve kolmanda võimsuseni (P = n 3).
Tsentrifugaalpumpade ja ventilaatorite tüüpiline töövahemik on vahemikus 50–90%. Koormustegur suureneb kiiruse ruuduga, st ligikaudu 30-lt 80% -ni.
Mõlemad tegurid kajastuvad sagedusmuunduriga juhitava elektrimootori pöördemomendi omadustes.
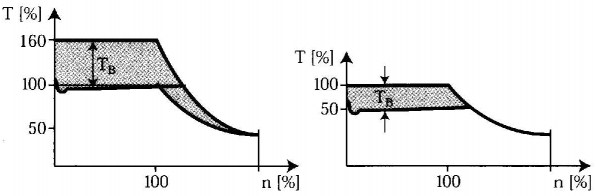
Joonistel 2 ja 3 on näidatud kahe suuruse sagedusmuunduri pöördemomendi karakteristikud, millest ühel (joonis 3) on väiksem võimsusvahemik kui teisel. Mõlemad pöördemomendi omadused määrati tsentrifugaalpumba samadele koormusomadustele.
Joonisel fig. 2 on pumba kogu töövahemik (0-100%) mootori parameetrite nimiväärtuste piires. Kuna pumba normaalne töövahemik on 30-80%, saab valida väiksema väljundvõimsusega sagedusmuunduri.

Riis. 2. Suure võimsusega sagedusmuundur
Riis. 3. Madala võimsusega sagedusmuundur
Kui koormuse pöördemoment on konstantne, peab mootor suutma tekitada koormusmomendist suurema pöördemomendi, kuna liigset pöördemomenti kasutatakse kiirendamiseks.
Kiirendamiseks ja suure algpöördemomendi tagamiseks, näiteks veorihmkonveierite puhul, piisab lühiajalisest ülekoormusmomendist 60% sagedusmuunduri poolt arendatavast pöördemomendist. Ülekoormusmoment annab süsteemile ka võime tulla toime koormuse äkilise suurenemisega. Sagedusmuundur, mis ei võimalda ülekoormusmomenti, tuleb valida nii, et kiirendusmoment (T B) jääks nimimomendi piiresse.
Riis. 4. Kiirendamiseks kasutatakse ülekoormusmomenti
Koormusomaduste määramisel võetakse arvesse nelja erinevat mootori spetsifikatsiooni komplekti, mis võimaldavad teha otsuseid sagedusmuunduri võimsuse suuruse valiku osas.
1. Sagedusmuundurit saab kiiresti ja täpselt valida mootori tarbitava voolu l M alusel. Kui mootor ei ole täielikult koormatud, saab selle voolu mõõta, kui sarnane süsteem töötab täiskoormusel.

Riis. 5.
Elektrimootor 7,5 kW, 3 x 400 V tarbib voolu 14,73 A.
Sagedusmuunduri tehnilisteks andmeteks valitakse muundur, mille pidev maksimaalne väljundvool on suurem või võrdne 14,73 A konstantse või ruutmomendi karakteristikuga.
Märge:
Kui sagedusmuundur on valitud võimsuse järgi (meetodid 2-4), on vaja võrrelda arvestuslikku võimsust ja sagedusmuunduri tehnilistes andmetes märgitud võimsust samal pingel. Kui sagedusmuundurit arvutatakse voolu järgi (meetod 1), ei ole see vajalik, kuna sagedusmuunduri väljundvool mõjutab muid andmeid.
2. Sagedusmuundurit saab valida mootori tarbitava näivvõimsuse S M ja sagedusmuunduri poolt tarnitava näivvõimsuse alusel.

Riis. 6.
Sagedusmuunduri arvutamise ja valiku näide:
Elektrimootor 7,5 kW, 3x400 V tarbib voolu 14,73 A. Sm =U x I x √3 / 1000 = 400 x 14,73 √3 / 1000 = 10,2 kVA
Sagedusmuunduri tehniliste andmete osas valitakse sagedusmuundur, mille pidev maksimaalne väljundvõimsus on suurem või võrdne 10,2 kVA konstantse või ruutmomendi karakteristikuga.
3. Sagedusmuundurit saab valida ka vastavalt elektrimootori poolt genereeritavale võimsusele R m. See meetod on aga ebatäpne, kuna cos φ ja efektiivsus η muutuvad koos koormusega.

Riis. 7.
Mootori võimsuse arvutamise näide
Elektrimootor võimsusega 3 kW, mille cos φ = 0,80 ja η = 0,81, tarbib võimsust S M = P M / (η x cos φ) = 3,0 / (0,80 x 0,81) = 4,6 kVA
Sagedusmuunduri tehnilisteks andmeteks valitakse muundur, mille pidev maksimaalne väljundvõimsus on suurem või võrdne 4,6 kVA konstantse või ruutmomendi karakteristikuga.
4. Praktikas vastab enamiku sagedusmuundurite nimivõimsus asünkroonmootorite standardseeriale. Seetõttu valitakse sagedusmuundurid sageli sellest kaalutlusest lähtuvalt, mis aga võib põhjustada nende omaduste ebatäpset määramist, eriti kui elektrimootor pole täielikult koormatud.

Riis. 8.
Voolu jaotus sagedusmuunduris (elektrimootori cos φ (phi))
Elektrimootori magnetiseerimiseks vajalik vool saadakse sagedusmuunduri vaheahelas asuvast kondensaatorist. Magnetiseeriv vool on reaktiivvool, mis voolab kondensaatori ja mootori vahel (joonis 9).

Riis. 9. Voolud sagedusmuunduris
Võrgust tuleb ainult aktiivvool (l W). Seetõttu on sagedusmuunduri väljundvool alati suurem kui sisendvool. Lisaks aktiivvoolule tarbitakse võrgust voolu I kadu (kaduvool).
Arvutamise näide
Koormuse puudumisel on 4-pooluselise 1,1 kW mootori vool 1,6 A. Ühendatud sagedusmuunduri väljundvool on umbes 1,6 A ja sisendvool koormuseta töötamisel peaaegu null.
Mootoritootjad näitavad tavaliselt mootori cos φ nimivoolu korral. Väiksema cos φ väärtusega (näiteks sünkroonse reluktantsmootori puhul) on elektrimootori nimivool samade võimsuse ja pinge väärtuste juures suurem, nagu on näha järgmisest võrrandist:
I S = I W / cos φ
Kui sagedusmuundur on valitud lähtudes elektrimootori nimivoolust (meetod 1), siis elektrimootori nimimoment ei vähene.
Mootori klemmidega reaktiivvoolu kompenseerimiseks ühendatud kondensaator tuleb eemaldada. Sagedusmuunduri kõrge lülitussageduse tõttu käitub kondensaator nagu lühis ja põhjustab mootori voolu olulist suurenemist. Inverter tõlgendab seda maandusrikke või lühisena ja lülitub välja.
Mootori kiiruse reguleerimine
Sagedusmuunduri väljundsagedust ja seega ka mootori kiirust juhitakse ühe või mitme signaaliga (0-10 V, 4-20 mA või pingeimpulsid). Kiirusesignaali rakendamisel suureneb mootori kiirus ja mootori pöördemomendi kõvera vertikaalne osa nihkub paremale (joonis 10).

Riis. 10. Juhtsignaali ja mootori pöördemomendi karakteristikute vaheline seos
Kui koormuse pöördemoment on väiksem kui mootori nimimoment, saavutab kiirus nõutava väärtuse. Nagu on näidatud joonisel fig. 11, koormuskarakteristikud lõikuvad vertikaalses osas (punktis A) elektrimootori pöördemomendi karakteristikutega. Kui ristumiskoht toimub horisontaalses osas (punkt B), ei saa elektrimootori pöörlemiskiirus pikema aja jooksul ületada vastavat väärtust Sagedusmuundur võimaldab ületada lühisvoolu piiri ilma väljalülitumata (punkt C), kuid ületamise kestus peab olema ajaliselt piiratud.

Riis. 11. Mootori vool võib lühiajaliselt ületada voolupiiri
Kiirendus- ja aeglustusrambid
Kiirenduskarakteristik (ramp) näitab kiirust, millega pöörlemiskiirus suureneb, ja on määratud kiirendusajaks t acc . Need rambid põhinevad peamiselt mootori nimisagedusel, näiteks 5 s ramp tähendab, et sagedusmuunduril kulub 5 sekundit, et jõuda nullist mootori nimisagedusele (f = 50 Hz).

Riis. 12. Kiirendus- ja aeglustusaeg
Pidurdusramp näitab, kui kiiresti kiirus väheneb. Seda näidatakse pidurdusaja t dets kujul.
Otsene üleminek kiirenduselt aeglustusele on võimalik, kuna mootor jälgib alati inverteri väljundsagedust.
Kui on teada elektrimootori võlli inertsimoment, saab välja arvutada optimaalsed kiirendus- ja aeglustusajad.
t acc = J x (n 2 - n 1)/[(T acc – T fric) x 9,55]
tdec = J x (n 2 - n 1)/[(T acc + T fric) x 9,55]
J on elektrimootori võlli inertsimoment.
T fric on süsteemi hõõrdemoment.
Tass - kiirendamiseks kasutatav liigne (ülekoormus) pöördemoment.
T dec on pidurdusmoment (pidurdusmoment), mis tekib siis, kui kiiruse etalonväärtus väheneb.
n 1 ja n 2 - pöörlemiskiirused sagedustel f 1 ja f 2.
Kui sagedusmuundur lubab lühiajalist ülekoormusmomenti, siis on kiirendus- ja aeglustusmomendid seatud võrdseks elektrimootori T nimipöördemomendiga. Praktikas on kiirendus- ja aeglustusajad enamasti samad.
Arvutamise näide
J = 0,042 kgm 2, T fric = 0,05 x M N, n 1 = 500 p / min, n 2 = 1000 p / min, T N = 27 Nm
tacc = J x (n 2 – n 1)/ [(T ac - T fric) x 9,55] = 0,042 x (1000 - 500)/ [(27,0 - (0,05 x 27,0)) x 9,55] = 0,1 [s]
Dünaamiline pidurdamine
Kui kiiruse võrdlussignaal väheneb, toimib elektrimootor generaatorina ja pidurdab. Aeglustus pidurdamisel sõltub elektrimootori koormusest.
Otse võrku ühendatud elektrimootorid annavad pidurdusjõu tagasi võrku.
Kui mootorit käitab sagedusmuundur, salvestatakse pidurdusenergia sagedusmuunduri vaheahelasse. Kui pidurdamisel vabanev võimsus on suur ja sagedusmuundur ei suuda seda oma konstruktsiooni tõttu hajutada, suureneb vaheahela pinge.
Vaheahela pinge võib tõusta kuni sagedusmuunduri kaitsevahenditega väljalülitamiseni ja vahel tuleb pidurdusjõu neelamiseks vaheahelasse ühendada koormus pidurisõlme ja välistakisti näol.?
Pidurimooduli ja pidurdustakisti kasutamine võimaldab kiiret pidurdamist suure koormuse korral. Küll aga on kütmisega seotud probleeme. Teine lahendus on regeneratiivpiduriseadme kasutamine. Selliseid seadmeid kasutatakse kontrollimatu alaldiga sagedusmuundurite jaoks, mis tagastavad pidurdusenergia toitevõrku.
Juhitava alaldiga sagedusmuundurites saab pidurdusvõimsust võrku tagasi tuua (vt joonis 13), kasutades näiteks alaldi külge tagasi ühendatud inverterit.

Riis. 13. Pidurimooduli ja piduritakisti sisselülitamine

Riis. 14. Selja-tagasi inverter
Teine võimalus elektrimootori pidurdamiseks on alalisvoolupidurdus. Staatoris magnetvälja tekitamiseks rakendatakse elektrimootori kahe faasi vahele alalisvoolu pinge. Kuna pidurdusenergia jääb mootorisse ja ülekuumenemine on võimalik, on alalisvoolupidurdamine soovitatav madalatel kiirustel, et vältida mootori nimivoolu ületamist. Tavaliselt on alalisvoolu pidurdamine ajaliselt piiratud.?
Tagurpidi
Asünkroonsete elektrimootorite pöörlemissuund määratakse toitepinge faaside järjekorras.
Kui kaks faasi vahetatakse, muutub mootori pöörlemissuund ja see pöörleb vastupidises suunas.
Enamik elektrimootoreid on ette nähtud mootori võlli päripäeva pöörlemiseks, kui ühendus on tehtud järgmiselt:

Riis. 15. Elektrimootori pöörlemissuunda muudetakse faaside järjekorda muutes
Sama reegel vastab enamiku sagedusmuundurite väljundklemmide faaside järjestusele.
Sagedusmuundur saab mootorit ümber pöörata, muutes elektroonika abil faasijärjekorda. Tagurdamine toimub kas negatiivse kiiruse seadmisega või digitaalse sisendsignaali abil. Kui esmasel kasutuselevõtul peab mootoril olema kindel pöörlemissuund, peab olema teada sagedusmuunduri tehase vaikesäte.
Kuna sagedusmuundur piirab mootori voolu nimiväärtuseni, saab sagedusmuunduriga juhitavat mootorit pöörata sagedamini kui otse liiniga ühendatud mootorit.

Riis. 16. Sagedusmuunduri pidurdusmoment tagurdamisel
Kaldteed
Kõigil sagedusmuunduritel on tõrgeteta töö tagamiseks muutuva kiirusega (ramp) funktsioonid. Neid rampe saab muuta ja tänu neile saab kiiruse referentsi teatud intervalli jooksul suurendada või vähendada.

Riis. 17.Reguleeritav kiirendus- ja aeglustusaeg
Kiirendus-/aeglustuskarakteristiku kaldenurka (kiirenduse/aeglustuse kestus) saab seada nii väikeseks, et mõnes olukorras ei suuda elektrimootor ülesannet täita (ei suuda mootorit etteantud piires kiirendada/aeglustada). aeg).
See põhjustab mootori voolu suurenemist, kuni voolupiir on saavutatud. Kui aeglustusaeg (t -a) on lühike, võib vaheahela pinge tõusta sellisele tasemele, et sagedusmuunduri kaitseahel peatab muunduri.
Optimaalse kiiruse muutmise aja saab arvutada allolevate valemite abil.
t a = J x n/[(T N -T fric)x9,55]
t -a = J x n/[(T N + T fric)x9,55]
t a - kiiruse suurendamise aeg
t -a - kiiruse vähendamise aeg
n - pöörete arv
T N - elektrimootori nimipöördemoment
T fric – hõõrdemoment

Riis. 18. Kiiruse muutmise aja seadistamine
Kiirendus-/aeglustusaeg valitakse tavaliselt mootori nimipöörete arvu alusel.
Praegune juhtimine
Sagedusmuundurid suudavad jälgida juhitavat protsessi ja sekkuda tõrke korral.
Sellise monitooringu võib olenevalt objektist jagada kolme liiki: protsessitehase monitooring, elektrimootori monitooring ja sagedusmuunduri monitooring.
Paigaldamise juhtimine Põhineb elektrimootori väljundsageduse, väljundvoolu ja pöördemomendi jälgimisel. Nende parameetrite põhjal saab määrata mitmeid piire, mille ületamine mõjutab juhtimisfunktsiooni. Need piirangud võivad olla mootori väikseim lubatud pöörlemissagedus (minimaalne sagedus), suurim lubatud vool (voolupiirang) või suurim lubatud mootori pöördemoment (pöördemomendi piirang).
Sagedusmuundurit saab programmeerida näiteks andma hoiatussignaali, vähendama elektrimootori kiirust või peatama mootorit, kui selle kiirus ületab seatud piire.
Näide
Paigaldustes, mis kasutavad mootori ühendamiseks ülejäänud süsteemiga kiilrihma, saab sagedusmuunduri programmeerida jälgima selle rihma seisukorda.
Kuna rihma katkemise korral suureneb väljundsagedus kiiremini kui seatud ramp, saab seda sagedust kasutada sellistes olukordades mootori hoiatamiseks või peatamiseks.
Mootori juhtimine saab teha sagedusmuunduri abil, jälgides mootori soojusmudelit või ühendades mootoriga termistori. Sagedusmuundur suudab vältida mootori ülekoormust, toimides nagu termorelee. Väljundsagedus osaleb ka sagedusmuunduri tehtavates arvutustes. See tagab, et mootor ei ole madalatel pööretel kehva siseventilatsiooni tõttu ülekoormatud. Kaasaegsed sagedusmuundurid on võimelised kaitsma ka sundõhumootoreid, kui vool muutub liiga suureks.
Sagedusmuunduri jälgimine traditsiooniliselt toodetud nii, et liigvoolu korral lülitub muundur välja. Mõned muundurid võimaldavad lühiajalist liigvoolu. Sagedusmuunduris olev mikroprotsessor suudab üheaegselt arvestada mootori voolu väärtust ja selle rakendamise aega, mis tagab sagedusmuunduri optimaalse kasutamise ilma ülekoormamiseta.
Põhineb Danfossi materjalidel
Sagedusmuundurid muudavad mootori pöörlemissageduse muutmise lihtsaks ja muudavad selle töö sujuvamaks. See suurendab seadmete efektiivsust ja pikendab selle kasutusiga.
Mis on sagedusmuundurid
Sagedusmuundurid on seadmed, mis võimaldavad muuta väljundpinge sagedust. See on vajalik mootori pöörlemiskiiruse muutmiseks.
Otse vooluvõrku ühendamisel jääb võnkesagedus muutumatuks, standardväärtused on 50 või 60 Hz. Sagedusmuunduri kasutamine võimaldab rootori pöörlemist suurendada või vähendada. Võimalike muutuste vahemik on 0,5-800 Hz. Kuid nüüd on enamik mootoreid mõeldud sagedusele, mis ei ületa 400 Hz.
Konverteri peamised omadused
Kaasaegsed elektriseadmed on programmjuhtimisega kõrgtehnoloogilised seadmed. Elektrooniline juhtimissüsteem vastutab täpsuse ja töökindluse eest. Seadmed on üsna kompaktsed ja hõlpsasti kasutatavad.
Sõltuvalt sellest, kas väljundpinget saab reguleerida, jagatakse muundurid juhitavateks ja mittejuhitavateks. Esimeses saab parameetreid muuta, teises määrab indikaatorid seadme konstruktsiooni järgi. On ka mudeleid, kus automaatne häälestamine toimub ühendatud mootori parameetritele. Selleks tuleb sooritada identifitseerimiskäivitus, mille käigus määratakse automaatselt mähise parameetrid.
Lisaks indikaatorite reguleerimisvõimalusele on seadme juhtimist erinevat tüüpi. Neid on kaks: skalaar ja vektor. Skalaar ei anna võimalust täpseid seadistusi määrata, see määrab ainult sisendi ja väljundi sageduste suhte. Kui sisendandmed muutuvad, muutuvad lõppparameetrid proportsionaalselt. Vektorjuhtimine võimaldab määrata konkreetse mootori jaoks konkreetses olukorras täpselt vajalikud parameetrid.
Seadmete täpsemaks töötamiseks ja juhtimise lihtsamaks muutmiseks on kaasaegsed seadmed varustatud mälukaartide ja ekraaniga teabe kuvamiseks.
Konverterite kasutamisel on vaja arvestada mõningate nüanssidega. Seega põhjustab mootori madalatel pööretel töötamine temperatuuri tõusu, millega sisseehitatud ventilaator ei pruugi toime tulla. Seetõttu on vaja jälgida kütmist ja vajadusel kasutada sundjahutust.
Samuti muutub töötav muundur võimsaks kõrgsagedusliku voolu allikaks. Seadmete enda mikroskeemid on häirete eest kaitstud spetsiaalsete filtritega. Kuid selleks, et vibratsioon ei mõjutaks teiste seadmete tööd, peate kasutama võimalikult lühikese pikkusega varjestuskaablit. Kaugus teistest kaablitest peab olema vähemalt 10 cm Kui on vajadus üle minna, tuleb seda teha 90° nurga all.
Sagedusmuundurite rakendamine
Sagedusmuundurid on ühendatud seadmetega, mille töö hõlmab mootori kiiruse muutmist.
Sellised mehhanismid hõlmavad järgmist:
-
ventilatsioonisüsteemid;
konveierid;
kompressorid;
manipulaatorid ja ekskavaatorid;
-
tsentrifuugid;
robootika jne.
Samuti kasutatakse omavahel ühendatud mehhanismide töö sünkroonimiseks sagedusmuundurit. Sõltuvus võib olla nii otsene kui ka pöördvõrdeline.
Toimimispõhimõte
Tagamaks, et muundurit läbiv pinge muudab selle omadusi, kasutatakse kahekordse muutuse põhimõtet. Sisendis alaldatakse võrgupinget dioodsilla abil ja filtreeritakse kondensaatorite abil. Siin tasandatakse võnkumiste amplituud, misjärel voolab vool konverteerivasse ossa.
Teisendus toimub tänu teatud viisil kombineeritud transistoridele (tavaliselt on neid 6). Need on omavahel ühendatud ahelaga. Nende abiga seatakse vooluvõnkumiste sageduse ja amplituudi vajalikud indikaatorid.
Juhtimissüsteeme on kahte tüüpi:
amplituud, kui sisendpinge indikaatorid on reguleeritud;
impulsi laius (PWM), mille puhul indikaatorite muutusi mõjutab transistoride lülitamise järjekord. Teatud, rangelt määratletud järjekorras jõuab signaal positiivsesse ja negatiivsesse klemmi, mille tulemuseks on selgelt määratletud parameetritega sinusoid.
Protsessi juhitakse ja määratud omadusi muudetakse mikroprotsessorite abil. Spetsiaalne mikrokontroller saadab signaali mikroskeemile. Muutusi võrreldakse etteantud standardiga (5 Hz). Järgmisena teisendab programm spetsiaalse algoritmi abil voolu vajalikuks väärtuseks. Lisaks jälgib mikrokontroller pooljuhtide temperatuuri, kaitseb seadet ülekuumenemise ja äkiliste pingetõusude eest.
Seadete kaitsmiseks välismõjude eest on korpus usaldusväärselt kaitstud. Vältida tuleb mitte ainult mehaanilisi kahjustusi (löögid, tolm, niiskus), vaid ka võimalikke vastastikusi häireid, mida tekitavad muud tööseadmed. Raadiohäirete ja nähtamatute elektrilahenduste vähendamiseks kasutatakse spetsiaalset filtrit.
Selle tulemusena annab väljund selge ja stabiilse vajaliku sagedusega signaali, mis juhib elektrimootorit ja seab soovitud kiiruse.
Valiku kriteeriumid
Seal on suur hulk mudeleid, mis erinevad tehniliste omaduste ja hinna poolest.
Õige valiku tegemiseks peate kaaluma:
Võimsus. Peate keskenduma maksimaalsele energiale, mida mootor tarbib. Sel juhul peaks seadme jõudlus ületama seda väärtust ligikaudu 10%. See vähendab ülekoormuse ohtu, kuna isegi maksimaalse jõudlusega töötades on võimsusreserv. Kui ühendatud seadmeid iseloomustavad koormuse tõusud, peaksite keskenduma ka maksimaalsetele näitajatele. Kui muunduriga on ühendatud mitu mootorit, kasutatakse arvutamisel nende koguvõimsust;
Võrgupinge. Mida suurem on vahemik, seda parem. Samal ajal, kui võrgu pinge langus viib seadme väljalülitamiseni, võivad liiga kõrged näidud põhjustada muunduri rikke;
Sageduse reguleerimise vahemik. Ülemine piir vastab ühendatud seadmete maksimaalsele töösagedusele. Alumine piir näitab kiiruse reguleerimise vahemikku. Standardne suhe on 1:10;
Sisendfaaside arv (üks või kolm). Kolmefaasilised mudelid paigaldatakse tööstusseadmetele, mille sisendvõimsus on 380 volti. Ühefaasilisi saab kasutada ainult siis, kui toiteallikaks on 220-voldine võrk. Sellest sõltub ka ühendusskeem elektrimootoriga;
Kasutusala: Tavatingimustes piisab standardsest korpuse kaitsest. Kui seadet kasutatakse näiteks mäetööstuses, on vaja kõrgemat kaitsetaset. See omadus on tähistatud IP-märgisega. Mida kõrgem on indikaator, seda usaldusväärsemalt on seade kaitstud;
Kontrolli meetod. Vektor-tüüpi ühikud on kallimad, kuid võimaldavad täpsemaid seadistusi. Skalaarjuhtimine võimaldab säilitada ainult sisend- ja väljundindikaatorite vahelist suhet. Kuid teatud tüüpi seadmete, näiteks ventilaatorite jaoks on see täiesti piisav;
Sisend- ja väljundsignaalide arv. Tänu neile suurendatakse muunduri juhtimis- ja konfigureerimisvõimalusi. Need on diskreetsed, analoogsed ja digitaalsed. Diskreetsed sisendid võimaldavad anda juhtkäske (start, stop, reverse jne). Analoogsisendeid kasutatakse seadme reguleerimiseks ja konfigureerimiseks töö ajal. Digitaalseid sisendeid kasutatakse andurite signaalide sisestamiseks. Diskreetsed väljundid annavad seadmelt “tagasisidet”, andes teada kriitilistest muutustest selle töös (viga, ülekuumenemine, liiga kõrge pinge jne). Analoogväljundeid on vaja keerukate süsteemide ehitamiseks. Mida rohkem sisendeid ja väljundeid, seda täpsemad on seadistused ja seda kõrgem on teisenduse kvaliteet. Kuid seadme keerukus mõjutab paratamatult hinda;
Konverterit vajavad seadmed. On kaubamärgiga mudeleid, mis on mõeldud konkreetsete seadmete jaoks. Seal on universaalsed seadmed mitmeotstarbeliseks kasutamiseks.
Garantii ja teenindustingimused. Kvaliteetne teenus võimaldab teil mitte muretseda muunduri jõudluse ega ka seadmete pärast, millega see on ühendatud.
Sagedusmuundurite eelised
Sagedusmuunduri kasutamine annab palju eeliseid:
energiasääst;
mootori kaitse probleemide eest, mis on seotud vooluindikaatorite muutumisega (pinge tõusud, lühised, võrgu ülekoormused jne);
mootori pöörlemiskiiruse reguleerimise täpsus suureneb;
kiiruse erinevused käivitamisel ja pidurdamisel tasandatakse;
saate juhtida mehhanismide rühma;
lihtsam juhtimissüsteem;
seadete muutmine seadme töötamise ajal ilma seda peatamata;
elektrimootori tööea pikendamine.
Kõik see lihtsustab keerukate mehhanismide haldamist, suurendab tõhusust, pikendab seadmete eluiga ja kokkuvõttes annab märkimisväärse eelarvesäästu.
Kolmefaasilise asünkroonse elektrimootori loomine toimus 19. sajandi lõpus. Sellest ajast peale pole ükski tööstuslik töö olnud võimalik ilma selle kasutamiseta. Kõige olulisem hetk tööprotsessis on mootori sujuv käivitamine ja pidurdamine. See nõue on sagedusmuunduri abil täielikult täidetud.
Kolmefaasilise elektrimootori sagedusgeneraatori nimetuste jaoks on mitu võimalust. Eelkõige võib seda nimetada:
- Inverter;
- vahelduvvoolu sagedusmuundur;
- Sageduse konverter;
- Muutuva sagedusega ajam.
Inverterit kasutatakse elektrienergia muundamiseks mehaaniliseks energiaks. Sel juhul tehtud liigutuse saab muuta teist tüüpi liikumiseks.
- "Kolmnurk".
Diagramm on asjakohane, kui peate juhtima ühefaasilist ajamit. Konverteri võimsustase ahelas on kuni kolm kilovatti ja võimsust ei kao.
- "Täht".
Tööstuslikest kolmefaasilistest võrkudest toidetavate kolmefaasiliste sagedusajamite klemmide ühendamiseks sobiv meetod.
Joonisel on 8400 Vectori sagedusmuunduri ühendusskeem
Üle 5 kW võimsusega elektrimootori käivitamisel käivitusvoolu piiramiseks ja käivitusmomendi vähendamiseks kasutatakse täht-kolmlülitit.
Kui staatorile rakendatakse pinget, ühendatakse seade tähena. Niipea, kui mootori kiirus hakkab vastama nimiväärtusele, antakse toide vastavalt "kolmnurga" vooluringile. Kuid seda tehnikat kasutatakse ainult siis, kui tehnilised võimalused võimaldavad ühendada kahte ahelat.
Kombineeritud tähe- ja kolmnurkahelas täheldatakse järske voolu hüppeid. Teist tüüpi ühendusele üleminekul vähenevad pöörlemiskiiruse näidud oluliselt. Eelmise töörežiimi ja kiiruse taastamiseks tuleb voolutugevust suurendada.
Sagedusgeneraatoreid kasutatakse kõige aktiivsemalt 0,4–7,5 kW võimsusega elektrimootori projekteerimisel.
DIY sagedusmuunduri koost
Samaaegselt sagedusmuundurite tööstusliku tootmisega jääb sellise seadme kokkupanek oma kätega aktuaalseks. Seda soodustab eriti protsessi suhteline lihtsus. Inverteri töö tulemusena muudetakse üks faas kolmeks.
Sarnase seadmega varustatud elektrimootorite kasutamine kodutingimustes ei tekita lisaraskusi. Seetõttu võite julgelt asja kallale asuda.

Joonisel on näidatud alalisvoolulüliga sagedusmuundurite plokkskeem.
Montaažil kasutatavad sagedusmuunduri ahelad koosnevad alaldiplokist, filtrielementidest (vastutavad vahelduvvoolukomponendi väljalõikamise eest ja on konstrueeritud IGBT transistoridest). Kulude poolest on muunduri üksikute komponentide ostmine ja ise kokkupanek odavam kui valmis seadme ostmine.
Isemonteeritavaid sagedusmuundureid saab kasutada elektrimootorites võimsusega 0,1 - 0,75 kW.
Samas on tänapäevased tehase sagedusgeneraatorid tänu sellele, et nende tootmises kasutatakse mikrokontrollereid, laiendatud funktsionaalsust, täiustatud algoritme ja paremat kontrolli tööprotsessi ohutuse üle.
Konverterite kasutusalad:
- Masinaehitus;
- Tekstiilitööstus;
- Kütuse- ja energiakompleksid;
- Puurkaevu- ja kanalisatsioonipumbad;
- Protsessi juhtimise automatiseerimine.
Elektrimootorite maksumus sõltub otseselt sellest, kas see on varustatud muunduritega.
- Kui kasutaja tegi valikul vea võimsusega ja see osutus liiga suureks, ei suuda muundur mootorit kaitsta võimaliku ülekoormuse, pinge tõusude ja muude tegurite eest.
- Väiksem võimsus ei loo tingimusi masina hea efektiivsuse saavutamiseks. Madala võimsusega muundur ei suuda pakkuda pumbaseadme töörežiimi kõrget dünaamikat. Aeg-ajalt esinev ülekoormus võib põhjustada talitlushäireid.
Valimisel arvestatavad tegurid
Seadme töötingimused on oluline tegur, mis mõjutab elektrimootori kasutusiga. Seetõttu peate valimisel pöörama tähelepanu järgmistele teguritele:
- elektrimootori töökiiruse piirangud;
- pöördemomentide tööpiirid;
- koormuse iseloom;
- töögraafik.
Kõik omadused on omavahel seotud. Seega on koormust mitut tüüpi ja see on seotud selliste omadustega nagu kiirus, pöördemoment ja käivitusmoment. Juhtub:
- funktsionaalne või kasutatakse koormate tõstmiseks, näiteks sildkraana, elektrimootori saab ühendada inverterist;
- koormus energia ülekande ja salvestamisega.
Pöörlemis- ja pöördemomendi kiirused on seotud kiiruse, pöördemomendi ja aja parameetritega, need sõltuvad järgmistest omadustest:
- konstantne pöördemomendi väärtus;
- püsikiirus;
- pöördemomendi arvu vähenemine;
- kiiruse vähenemine.
Koormuse olemus sõltub sellistest näitajatest nagu:
Omadused elektrimootori sagedusmuunduri arvutamisel
Enne sagedusmuunduri valimist valige ja arvutage elektrimootori sagedusmuundur. Kindlasti pöörake tähelepanu kiiruspiirangute kestusele, sh korduvale lühiajalisele kiiruspiirangule. Arvesse tuleb võtta maksimaalse voolu hetkväärtust ja alalisvoolu kestust muunduri väljundis.
Oluline on arvestada maksimaalse ja nimisagedusega. Arvesse võetakse elektrijaotustrafo võimsust või takistust koos elektriliini juhtmetega või kaabelliiniga. Toiteallikas mõjutab ka pumpamisseadet, toitejuhtme pikkus mõjutab pingekadu. Arvesse on võetud võimalikud pingetõusud ja ebaühtlasest koormusest tingitud võimalik faaside tasakaalustamatus, mis mõjutab faaside tasakaalustamatust.
Arvesse võetakse selliseid tegureid nagu mehaaniline hõõrdumine, juhtide kaod ja töötsükli kõikumine.
Sagedusmuundurite valik pumpadele
Oluline on sagedusmuundur õigesti arvutada ja kombineerida pumpamisseadmega. Arvutamine mõjutab muunduri õiget valikut. Sellest sõltub nii muunduri enda kui ka kogu elektriajami (pumpamisseade) tõhusus ja kasutusiga.
Kuidas valida inverterit enne selle ostmist
Enne sagedusmuunduri valimist kontrollige elektrilist ühilduvust mootoriga ja kandevõimet (võimsust).
Riis. nr 1. VFD süsteemi töö plokkskeem.
Kui muundur töötab, tehakse valik sõltuvalt passi omadustest. Valimisel võetakse arvesse järgmisi näitajaid:
- Passi järgi peab inverteri ja elektrimootori võimsus olema võrdne. See parameeter kehtib kahe pooluste paariga (2p=4) mootorite kasutamisel, mille pöörlemiskiirused on kuni 1500 p/min, püsiva pöördemomendiga. See kehtib ka 150% ülekoormusega toimetulevatele inverteritele (konveierid, konveierilindid) ja 120% ülekoormusega töötavatele muunduritele (ventilaatorid, tsentrifugaalpumbad).
- Nimivool peab olema võrdne mootori pideva tegeliku tarbitava vooluga (koormusvool) või sellest suurem.
Tähtis: mootori poolt tarbitav vool peab olema väiksem spetsifikatsioonis toodud sagedusmuunduri nimivoolust.
Mootori kiirendusaeg 150% käivitusvoolu juures on pumpamisseadmetele spetsialiseerunud muundurite puhul 120%, nimimuundurist ei tohiks tavaliselt ületada 60 sekundit.
- Võrgu sisendpinge peab konverterit rahuldama, see peab säilitama oma funktsionaalsuse ka pinge kõrvalekallete korral normist.
- Sageduse reguleerimise vahemik, mida inverter suudab toetada, peab vastama mootori kiirele režiimile.
- Diskreetsete juhtimissisendite olemasolu on vajalik kasutaja poolt programmeeritud erinevat tüüpi käskude sisestamiseks. Vaja on ka analooge; neid kasutatakse ülesannete signaalide sisestamiseks ja tagasiside saamiseks. Digitaalseid sisendeid on vaja ka anduritest või digitaalsetest kiirus- ja asendianduritest tulevate kõrgsageduslike signaalide jaoks.
- Pumbajaama süsteemi keeruliste ahelate loomiseks kasutatakse mitmeid väljundsignaale.
- Töörežiimis tööjuhtimise võimalus, need võivad olla kaugjuhtimispuldi abil juhtsisendid. Või juhtimine jadaside siini kaudu kontrolleri või arvuti kaudu. Võib-olla on see kombineeritud kontroll.
- Konverteri valik sõltub elektrimootori juhtimismeetodi eelistusest. Sõltub eraldi vektormootori juhtimisest või skalaarjuhtimisest – väljundpinge ja väljundsageduse ühe konstantse suhte säilitamine. Pumbaseadmete puhul on tüüpilisem vektorjuhtimismeetod.
- Täpsemate valikukriteeriumide poole, mis määravad mootori töö püsikiirusel. Kui muundur töötab ühe mootoriga, arvutatakse käivitamiseks vajalik võimsus järgmise valemiga:
Riis. nr 2. Kogukäivitusvõimsuse arvutamise valem.
Mootori voolutarve muundurist võrgupingel 220/380 V arvutatakse järgmise valemi abil:

Riis. nr 3. Mootori mehaaniliste omaduste arvutamine.
Tähtis: juhindudes nõudest, kuidas valida õige sagedusmuundur vooluomaduste põhjal, peab muundur vastama kõigile standarditele ja nõuetele, kuid võimsusstandardeid võib ka tähelepanuta jätta.

Riis. nr 4. Tabel ebavõrdsustest, mida tuleb järgida inverteri valimisel ühe sagedusajami mitme mootoriga töötamiseks.
Sagedusmuunduri kasutamise eelised

Joon nr 5. Sagedusmuunduri valimise eelised
Sagedusmuunduri eelised hõlmavad mitmeid olulisi omadusi:
- Käivitusvoolu vähendamine tegeliku tööväärtuseni. Elektrimootori otse võrgust toiteks ja muundurist toiteks on erinevad tingimused. Esimesel juhul suureneb käivitusvool mootori voolu nimiväärtusest vähemalt seitse korda. Pehme käivitus mootori toitepinge sageduse järkjärgulise ja sujuva suurendamisega saab vähendada mootori tegeliku tarbimise tasemeni püsiseisundi töörežiimis. See saavutatakse kiirendusaja seadmisega; kui on vaja inertsiaalkoormust kiirendada, suudab muundur anda rohkem võimsust kui mootori võimsus.
- On olemas muundurite mudeleid, mis on maksimaalselt orienteeritud töötama muutuva pöördemomendiga koormustel, nimelt tsentrifugaalpumpadega varustatud pumbajaamade jaoks. Muunduri nimivool võib olla rohkem kui kaks astet suurem kui mootori nimivool.
- pumbaagregaatide käivitamine annab energiasäästu vähemalt 30%.
Vektorsagedusmuundurite puudused:
- Vektormuundurit on keeruline seadistada, vajalik on konsulteerimine spetsialistiga. Arvesse võetakse elektrimootori parameetreid, sealhulgas induktiivsust.
- Elektriajami kasutamise tehnoloogia peab tähendama 100% täpsust, ainult sel juhul on inverteri valik õigustatud.
- Vektormuundurit valides tuleb meeles pidada skalaarrežiimilt ümberlülitamist.
- Kõrged nõuded mõõteriistade ja vooluandurite täpsusele, mis mõjutab maksumust.
- Konkreetse elektrimootori jaoks on soovitav kasutada vektorinverterit.
Sagedusmuunduri optimaalne valik taandub selle funktsionaalsuse sobitamisele elektrimootori tehniliste omadustega. Sagedusmuunduri õige valik tagab teie elektriseadmete usaldusväärse ja pikaajalise töö.
1. KOORMUSE TÜÜBI VALIK
Tavaliselt määratakse ülekoormusvõime protsendina nimivoolust koos maksimaalse lubatud ajaga
selle ülekoormuse toime kuni kohese kaitse aktiveerimiseni. Seega peate õige valiku tegemiseks teadma oma konkreetse mehhanismi ülekoormuste olemust, eelkõige: milline on ülekoormuste tase, milline on nende kestus ja kui sageli need ilmnevad. Kõige tavalisemad 2 tüüpi koormused:
- püsiva koormusmomendiga (PM) töökiiruste vahemikus (konveierid, elevaatorid, ekstruuderid jne). Seda tüüpi koormust iseloomustavad ülekoormused kuni 10...50%.
- ruutkoormusmomendiga (“KM”) töökiiruse vahemikus (pumbad, ventilaatorid, labakompressorid). Seda tüüpi seadmete puhul on tüüpilised mitte üle 10% ülekoormused. Kuna ruutkoormusmomendiga seadmetes ülekoormusi ei esine, on nendele seadmetele võimalik paigaldada madalama nimiväärtusega invertereid.
2. MOOTORI NIME VOOLU JA TOITEPINGE MÄÄRAMINE
Nimivoolu ja pinge määramine on väga oluline küsimus. Kõige tavalisem juhtum on toiteallikas kolmefaasilisest tööstusvõrgust 380 V, kuid on juhtumeid, kui ajam on ette nähtud töötama ühefaasilisest 220–240 V võrgust. Reeglina on sellised ajamid piiratud võimsusega kuni 3,7 kW. Samuti on valikud kõrgepingeajamite jaoks, millel on võimalus juhtida võimsamaid mootoreid, mille võimsust mõõdetakse juba MW-des, suhteliselt madalamate vooluväärtuste juures.
On vaja määrata inverteri nimiväljundvool. See peab olema võrdne mootori nimivooluga või sellest suurem. Kui sagedusmuundur on mõeldud aastaid töös olnud asünkroonmootorile, soovitame valida teadlikult suurema väljundvooluga sagedusmuunduri.
3. VÕIMSUSE VALIK
Võimsus on elektriajami üks peamisi parameetreid. Sagedusgeneraatori valimisel peaksite kõigepealt kindlaks määrama selle kandevõime. Vastavalt mootori saadaolevale nimivõimsusele valitakse sama võimsuse jaoks mõeldud muutuva kiirusega ajam. Ja selline valik on õige tingimusel, et võlli koormus ei muutu dünaamiliselt ja vool ei ületa oluliselt määratud nimiväärtust nii antud mootori kui ka sagedusjaotusseadme puhul. Seetõttu oleks õigem teha valik elektrimootori poolt muundurist tarbitava voolu maksimaalse väärtuse järgi, võttes arvesse viimase ülekoormusvõimet.
4. KESKKONNATINGIMUSED
Tolmu ja niiskuse olemasolu määrab muunduri kaitseastme (IP): IP00 / IP20 / IP21 / IP54
Kui sagedusmuundureid kasutatakse kõrge õhuniiskuse ja agressiivse keskkonna tingimustes, soovitame kasutada lakitud plaate.
5. EMC-NÕUDED (elektromagnetiline ühilduvus)
Sagedusmuundureid saab valmistada sisseehitatud EMC-filtriga või nõuda selle filtri täiendavat ostmist.
6. KIIRE PIDURDUS
Vajaduse määrab pidurilõikuri ja piduritakisti olemasolu või puudumine. Elektrimootori pöörlemiskiiruse nulli vähendamiseks kasutatakse kolme meetodit:

7. VÕRGUVAHETUS. MOOTORI JUHTIMISE MEETOD
Elektrimootori ja automaatjuhtimissüsteemi koostööks kasutatakse erinevaid andmeedastusprotokolle. Enim kasutatav sideprotokoll on RS-485 liidesega Modbus, kuid olenevalt kasutatavast seadmest täpsustatakse ühe või teise protokolli kasutamise küsimus igal konkreetsel juhul. Konverteri juhtimismeetodi määrab sagedusmuunduri liideseplaatide tüüp ja arv. Kaasaegsed muundurid võivad töötada "välise juhtimise" režiimides, kui muundurit juhivad välised signaalid, "kaugjuhtimine", "kombineeritud juhtimine" ja "jadaliidese juhtimine". Kaasaegses tehnikas on levinumad kaks juhtsignaali (seadistatud): 0-10 V ja 4-20 V. Sagedusmuundur ise on võimeline reguleerima pöörlemiskiirust. Selleks on inverterisse sisse ehitatud PID-kontroller, samuti on võimalik ühendada mis tahes tehnoloogilise parameetri tagasisideandur.


