Pieni hydroakustinen asema. Yhdysvaltain laivaston hydroakustiset asemat joustavilla pidennetyillä hinattavilla antenneilla. Katso mitä "Hydroakustinen asema" on muissa sanakirjoissa
hydroakustinen asema- keino vedenalaisten esineiden äänen havaitsemiseksi akustisella säteilyllä.
Toimintaperiaatteen mukaan hydrolokaattorit ovat:
Passiivinen- mahdollistaa vedenalaisen kohteen sijainnin määrittämisen kohteen itsensä lähettämien äänisignaalien perusteella.
Aktiivinen- käyttämällä vedenalaisen esineen heijastamaa tai hajauttamaa signaalia, jonka luotain säteilee sitä kohti.
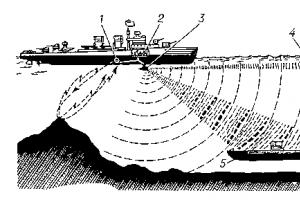
Yksinkertaistettu lohkokaavio hydroakustisesta asemasta: a - melun suuntamittari (1 - kiinteä akustinen järjestelmä, 2 - kompensaattori, 3 - vahvistin, 4 - ilmaisinlaite); b - kaikuluotain (1 - mobiili akustinen järjestelmä, 2 - suojus, 3 - pyörivä laite, 4 - "vastaanotto-lähetys" -kytkin, 5 - generaattori, 6 - vahvistin, 7 - ilmaisinlaite)
Hydroakustisen aseman akustinen järjestelmä koostuu useista sähköakustisista muuntimista (hydrofonit hydrofonien vastaanottoon, vibraattorit hydroakustisten kaiuttimien vastaanottamiseen) luomaan tarvittavat suuntaominaisuudet vastaanotolle ja säteilylle. Anturit sijaitsevat (riippuen gyroskoopin tyypistä ja käyttötarkoituksesta) laivan pohjan alle kääntö- ja veto-laitteessa tai akustisia tärinää läpäisevässä paikallaan olevassa suojuksessa, ne on rakennettu laivan ulkokuoreen, asennettu laivan hinaamaan tai helikopterista laskettuun konttiin ja asennettu merenpohjan kannatinrakenteen päälle. Kompensaattori tuo toisistaan erotettujen hydrofonien sähköpiireissä virtaaviin vaihtovirtoihin vaihesiirron, joka vastaa eroa akustisten värähtelyjen saapumisajoissa näihin hydrofoneihin. Näiden siirtymien numeeriset arvot osoittavat kiinteän akustisen järjestelmän suuntakäyrän akselin ja kohteen suunnan välisen kulman. Vahvistuksen jälkeen sähköiset signaalit syötetään indikaattorilaitteeseen (puhelin tai katodisädeputki) suunnan kiinnittämiseksi kohinaiseen kohteeseen. Aktiivinen G:n generaattori. luo lyhytaikaisia sähköisiä impulssisignaaleja, jotka sitten värähtelijät lähettävät akustisten värähtelyjen muodossa.
Niiden välisissä tauoissa kohteista heijastuneet signaalit vastaanottavat samat vibraattorit, jotka on tällä kertaa kytketty "vastaanotto-lähetys" -kytkimellä sähköisten värähtelyjen vahvistimeen. Etäisyys esineisiin määräytyy osoitinlaitteessa heijastuneen signaalin viiveellä suhteessa suoraan (säteilytettyyn) signaaliin.
H. s., tyypistä ja käyttötarkoituksestaan riippuen, toimivat infraääni-, ääni- ja (useammin) ultraäänialueen taajuuksilla (kymmistä hertseistä satoihin kHz), säteilevät tehoa kymmenistä wateista (jatkuvalla generoinnilla) satoihin kW (pulssissa), niillä on suunnanmääritystarkkuus asteesta, vaiheesta ampeeriin, asteesta ampeeriin riippuen. akustisten järjestelmien taajuudesta ja koosta johtuva suuntausominaiskäyrän terävyys ja menetelmäosoitukset. G:n toiminta-alue. vaihtelee satoista metristä kymmeniin kilometreihin tai enemmän ja riippuu pääasiassa aseman parametreista, jotka heijastavat kohteen ominaisuuksia (tavoitevoimakkuus) tai sen melusäteilyn tasoa, sekä fysikaalisista ilmiöistä, jotka liittyvät äänivärähtelyjen etenemiseen vedessä (taitto ja jälkikaiunta) ja oman vesivoimajärjestelmän liikkeen aiheuttaman laivan toiminnan häiriöiden tasosta.
G. s. Ne asennetaan sukellusveneisiin, armeijan pinta-aluksiin (kuva 2), helikoptereihin ja rannikkoalueisiin sukellusveneiden torjuntaan liittyvien ongelmien ratkaisemiseksi, vihollisen etsimiseksi, sukellusveneiden kommunikointiin keskenään ja pinta-alusten kanssa, tietojen tuottamiseen ohjustorpedojen ja torpedojen laukaisua varten, navigointiturvallisuus jne. Niitä käytetään navigointiin, kalapitoisuuksien etsimiseen, valtameritutkimukseen ja hydrologiseen työhön, viestintään sukeltajien kanssa ja muihin tarkoituksiin.
HYDROAKUSTINEN ASEMA
asema, joukko kaavamaisesti ja rakenteellisesti toisiinsa liittyviä akustisia, sähköisiä ja elektronisia laitteita ja laitteita, joiden avulla suoritetaan akustisten värähtelyjen vastaanotto tai lähetys tai vastaanotto ja lähetys vedessä.
Erottele G. kanssa. vastaanottaa vain akustista energiaa (passiivinen toiminta) ja vastaanottaa ja lähettää (aktiivinen toiminta). G. s. passiivinen toiminta [kohinan suuntamittari (kuva 1, a), G. s. tiedustelu, äänenmittausasema jne.] käytetään havaitsemaan ja määrittämään suunta (suuntima) meluisaan kohteeseen (liikkuva laiva, aktiivinen kotiutusasema jne.) kohteen synnyttämien akustisten signaalien (melu) perusteella sekä vastaanotettujen signaalien kuuntelemiseen, analysointiin ja luokitteluun. Passiivinen G. kanssa. heillä on toimintasalaisuus: heidän työtään ei voida havaita. G. s. aktiivista toimintaa [luotain (kuva 1, b), kaikuluotain, kaikuluotain jne.] käytetään havaitsemaan, määrittämään suunta ja etäisyys kokonaan tai osittain veteen upotettuun kohteeseen (sukellusvene, pintalaiva, jäävuori, kalaparvi, merenpohja jne.). Tämä saavutetaan lähettämällä lyhytaikaisia akustisia impulssisignaaleja tiettyyn tai kaikkiin suuntiin ja vastaanottamalla (lähetysten välisen tauon aikana) heijastuksen jälkeen kohteesta. Aktiivinen G. kanssa. pystyvät havaitsemaan sekä meluisia että ei-meluisia kohteita, liikkuvia ja paikallaan olevia, mutta ne voidaan havaita ja suunnata säteilyn avulla, mikä on eräs niiden haittapuoli. Sivun aktiiviseen G.:hen. Sisältää myös vedenalaiset ääniviestintäasemat, hydroakustiset majakat, hydroakustiset lokit, kaikumittarit ja muut akustiset asemat ja instrumentit. Lisätietoja suunnanhaku- ja paikannusmenetelmistä on kohdassa Art. Hydroakustiikka ja hydrolokaatio.
Pääosat passiivisen G. kanssa. ovat: akustinen järjestelmä (antenni), kompensaattori, vahvistin, ilmaisinlaite. Aktiivisessa G. s.:ssä on lisäksi generaattori ja kytkinlaite eli "vastaanotto-lähetys" -kytkin.
Akustinen järjestelmä H. kanssa. Se koostuu useista sähköakustisista muuntimista (hydrofonit - HS:n vastaanottoon, vibraattorit - HS:n vastaanottoon) tarvittavan vastaanoton ja säteilyn suuntaominaisuuksien luomiseksi. Anturit sijaitsevat (riippuen gyroskoopin tyypistä ja käyttötarkoituksesta) laivan pohjan alle kääntö- ja veto-laitteessa tai akustisia tärinää läpäisevässä paikallaan olevassa suojuksessa, ne on rakennettu laivan ulkokuoreen, asennettu laivan hinaamaan tai helikopterista laskettuun konttiin ja asennettu merenpohjan kannatinrakenteen päälle. Kompensaattori tuo toisistaan erotettujen hydrofonien sähköpiireissä virtaaviin vaihtovirtoihin vaihesiirron, joka vastaa eroa akustisten värähtelyjen saapumisajoissa näihin hydrofoneihin. Näiden siirtymien numeeriset arvot osoittavat kiinteän akustisen järjestelmän suuntakäyrän akselin ja kohteen suunnan välisen kulman. Vahvistuksen jälkeen sähköiset signaalit syötetään indikaattorilaitteeseen (puhelin tai katodisädeputki) suunnan kiinnittämiseksi kohinaiseen kohteeseen. Aktiivinen G:n generaattori. luo lyhytaikaisia sähköisiä impulssisignaaleja, jotka sitten värähtelijät lähettävät akustisten värähtelyjen muodossa. Niiden välisissä tauoissa kohteista heijastuneita signaaleja vastaanottavat samat vibraattorit, jotka on tällä kertaa kytketty "vastaanotto-lähetys" -kytkimellä sähköisten värähtelyjen vahvistimeen. Etäisyys esineisiin määräytyy osoitinlaitteessa heijastuneen signaalin viiveellä suhteessa suoraan (säteilytettyyn) signaaliin.
H. s., tyypistä ja käyttötarkoituksestaan riippuen, toimivat infraääni-, ääni- ja (useammin) ultraäänialueen taajuuksilla (kymmistä hertseistä satoihin kHz), säteilevät tehoa kymmenistä wateista (jatkuvalla generoinnilla) satoihin kW (pulssissa), niillä on suunnanmääritystarkkuus asteesta, vaiheesta ampeeriin, asteesta ampeeriin riippuen. akustisten järjestelmien taajuudesta ja koosta johtuva suuntausominaiskäyrän terävyys ja menetelmäosoitukset. G:n toiminta-alue. sijaitsee satoista metreistä kymmeniin kilometreihin tai enemmän ja riippuu pääasiassa aseman parametreista, jotka heijastavat kohteen ominaisuuksia (kohteen voimakkuus) tai sen melusäteilyn tasoa, sekä fysikaalisista ilmiöistä, jotka liittyvät äänivärähtelyjen etenemiseen vedessä (taitto ja jälkikaiunta) ja laivan oman hydrodynaamisen järjestelmän toiminnan aiheuttamien häiriöiden tasosta.
G. s. Ne asennetaan sukellusveneisiin, armeijan pinta-aluksiin (kuva 2), helikoptereihin ja rannikkoalueisiin sukellusveneiden torjuntaan liittyvien ongelmien ratkaisemiseksi, vihollisen etsimiseksi, sukellusveneiden kommunikoimiseksi keskenään ja pinta-alusten kanssa, tiedon tuottamiseksi ohjustorpedojen ja torpedojen laukaisua varten, navigointiturvallisuus jne. Niitä käytetään navigointiin, kalapitoisuuksien etsimiseen, valtameritutkimukseen ja hydrologiseen työhön, viestintään sukeltajien kanssa ja muihin tarkoituksiin.
Lit .: Karlov L. B., Shoshkov E. N., Hydroacoustics in sotilasasioissa, M., 1963; Prostakov A.L., Hydroacoustics in Foreign Fets, L., 1964; hänen, Hydroacoustics and ship, L., 1967; Krasnov V.N., Sijainti sukellusveneestä, M., 1968; Horton J., kaikuluotaimen perusteet, käänn. Englannista, L., 1961.
S. A. Barchenkov.
Suuri Neuvostoliiton Encyclopedia, TSB. 2012
Katso myös sanan tulkintoja, synonyymejä, merkityksiä ja mitä on HYDRO-ACOUSTIC STATION venäjäksi sanakirjoissa, tietosanakirjoissa ja hakuteoksissa:
- STATION Suuressa Encyclopedic Dictionaryssa:
(latinasta statio - seisova pysäköinti), 1) minkä tahansa maaliikenteen pysähdyspaikka, joukko rakenteita ja laitteita, joilla tällainen piste on varustettu. 2) Erityisesti ... - STATION
(lat. staattinen - seisominen, pysäköinti), 1) maaliikenteen pysähdyspaikka sekä joukko rakenteita ja laitteita, jotka tämä ... - STATION tietosanakirjassa:
ja no. 1. Piste, pysähdyspaikka rautateillä ja muilla liikennevälineillä sekä tämän vieressä olevat rakenteet ... - STATION tietosanakirjassa:
, -i, f. 1. Piste, pysähdyspaikka rautateillä ja joillakin muilla maaliikenneväylillä; tilat ja palvelut liittyvät… - STATION Suuressa venäjän tietosanakirjassa:
STATION (lat. statio - seisoo, pysäköinti), pysähdyspaikka k.-l. maitse kuljetus, joukko rakenteita ja laitteita, joihin tällainen esine on varustettu. … - STATION Täysin korostetussa paradigmassa Zaliznyakin mukaan:
sta"ntsion, sta"ntsion, sta"ntsion, sta"ntsiy, sta"ntsiy, sta"ntsiy, sta"ntsiyu, sta"ntsiy, sta"ntsiyu, sta"ntsiyu, sta"ntsiy, sta"ntsiyu, ... - STATION liikeviestinnän suuren venäjän kielen sanakirjassa:
työskentelee… - STATION Venäjän bisnessanaston synonyymisanastossa:
- STATION venäläisessä tesaurusessa:
Syn: katso perusta, katso yritys, katso kappale, katso ... - STATION venäjän kielen synonyymien sanakirjassa:
Syn: katso perusta, katso yritys, katso kappale, katso ... - STATION venäjän kielen Efremovan uudessa selittävässä ja johdannaissanakirjassa:
1. g. 1) Tietyllä reitillä liikennöivien rautatiejunien ja joidenkin muiden maakuljetusten pysähdyspaikka. 2) avautua Etäisyys … - STATION Venäjän kielen täydellisessä oikeinkirjoitussanakirjassa:
asema,... - STATION oikeinkirjoitussanakirjassa:
asema,... - STATION venäjän kielen sanakirjassa Ozhegov:
Joidenkin laitosten, yritysten, pisteiden tai tieteellisten tutkimuslaitosten ryhmien nimet erityistarkoituksiin Puhelin s. Sähköinen kanssa. Semenovodcheskaya s. Ilmatieteen s. … - STATION Dahlin sanakirjassa:
Nainen , lat. , Ranskan kieli matkailijoiden pysähtymispaikka; paikka, jossa he vaihtuvat, he ottavat tuoreita postihevosia, sisar. kone. ch. seisoa (kuten... - STATION Modernissa selittävässä sanakirjassa, TSB:
(latinasta statio - seisoo, pysäköinti), 1) minkä tahansa maaliikenteen pysähdyspaikka, joukko rakenteita ja laitteita, joilla tällainen piste on varustettu. 2) ... - STATION Venäjän kielen selittävässä sanakirjassa Ushakov:
asemat, w. (latinasta. statio). 1. Pysähdyspaikka pääteillä, postireiteillä. Yliopistollinen rekisterinpitäjä, postiaseman diktaattori. Vjazemsky (vitsillä... - STATION Efremovan selittävässä sanakirjassa:
asema 1. 1) Tietyllä reitillä liikennöivien rautatiejunien ja joidenkin muiden maakuljetusten pysähdyspaikka. 2) avautua … - STATION uudessa venäjän kielen sanakirjassa Efremova:
- STATION Suuressa nykyaikaisessa venäjän kielen selittävässä sanakirjassa:
minä 1. Pysähdyspaikka tietyllä reitillä liikennöivien rautatiejunien ja joidenkin muiden maaliikenteen tyyppien osalta. 2. avautua Etäisyys … - AVARUUSASEMA: KYLMÄN SODAN AVARUUSASEMA Collierin sanakirjassa:
Artikkeliin AVARUUSASEMA 1950-luvun lopulla asiantuntijoilla sekä Yhdysvalloissa että Neuvostoliitossa ei ollut ... - 1986.04.29
Gibraltarin salmessa Los Angeles-luokan aluksiin kuuluva uusin amerikkalainen sukellusvene Atlanta törmää pohjaan. Tämän seurauksena vene... - 1977.02.04 Sivuilla Historia Mitä, missä, milloin:
250 mailia lounaaseen San Diegosta Kaliforniassa suurissa syvyyksissä purjehtinut amerikkalainen ydinsukellusvene Snook törmää ja... - UZBEKIN NEUVOSTON SOSIALISTINEN TASAVALTA
- TURKMENIN NEUVOSTON SOSIALISTINEN TASAVALTA Suuressa Neuvostoliiton tietosanakirjassa, TSB.
- TAJIKIN NEUVOSTON SOSIALISTINEN TASAVALTA Suuressa Neuvostoliiton tietosanakirjassa, TSB.
- Neuvostoliitto. LUONNONTIETEET Suuressa Neuvostoliiton tietosanakirjassa, TSB:
Tieteet Matematiikka Tieteellistä tutkimusta matematiikan alalla alettiin tehdä Venäjällä 1700-luvulta lähtien, jolloin L. ... - ILOTULITUS Suuressa Neuvostoliiton tietosanakirjassa, TSB:
Neuvostoliiton kiertorata-asemien sarjan nimi, jotka vuodesta 1971 lähtien ovat lentäneet maapallon lähellä olevassa avaruudessa kosmonautien kanssa ja...
joukko kaavamaisesti ja rakenteellisesti toisiinsa liittyviä akustisia, sähköisiä ja elektronisia laitteita ja laitteita, joiden avulla suoritetaan akustisten värähtelyjen vastaanotto tai lähetys tai vastaanotto ja lähetys vedessä.
Erottele G. kanssa. vastaanottaa vain akustista energiaa (passiivinen toiminta) ja vastaanottaa ja lähettää (aktiivinen toiminta). G. s. passiivinen toiminta [Noise Finder ( riisi. 1 , a), G. s. tiedustelu, äänenmittausasema jne.] käytetään havaitsemaan ja määrittämään suunnan (suunnan) meluiseen kohteeseen (liikkuva laiva, aktiivinen kotiutusasema jne.) kohteen luomista akustisista signaaleista (melu), sekä vastaanotettujen signaalien kuuntelemiseen, analysointiin ja luokitteluun. Passiivinen G. kanssa. heillä on toimintasalaisuus: heidän työtään ei voida havaita. G. s. aktiivinen toiminta [Sonar ( riisi. 1 , b), kaikuluotain, kaikuluotain jne.] käytetään havaitsemaan, määrittämään suunta ja etäisyys kokonaan tai osittain veteen upotettuun kohteeseen (sukellusvene, pintalaiva, jäävuori, kalaparvi, merenpohja jne.). Tämä saavutetaan lähettämällä lyhytaikaisia akustisia impulssisignaaleja tiettyyn tai kaikkiin suuntiin ja vastaanottamalla (lähetysten välisen tauon aikana) heijastuksen jälkeen kohteesta. Aktiivinen G. kanssa. pystyvät havaitsemaan sekä meluisia että ei-meluisia kohteita, liikkuvia ja paikallaan olevia, mutta ne voidaan havaita ja suunnata säteilyn avulla, mikä on eräs niiden haittapuoli. Sivun aktiiviseen G.:hen. Sisältää myös vedenalaiset ääniviestintäasemat, hydroakustiset majakat, hydroakustiset lokit, kaikumittarit ja muut akustiset asemat ja instrumentit. Lisätietoja suunnanhaku- ja paikannusmenetelmistä on kohdassa Art. Hydroakustiikka ja hydrolokaatio.
Pääosat passiivisen G. kanssa. ovat: akustinen järjestelmä (antenni), kompensaattori, vahvistin, ilmaisinlaite. Lisäksi aktiivisessa G. s.:ssä on myös generaattori ja kytkinlaite eli "vastaanotto-lähetys" -kytkin.
Akustinen järjestelmä H. kanssa. Se koostuu useista sähköakustisista muuntimista (hydrofonit - HS:n vastaanottoon, vibraattorit - HS:n vastaanottoon) tarvittavan vastaanoton ja säteilyn suuntaominaisuuksien luomiseksi. Anturit sijaitsevat (riippuen gyroskoopin tyypistä ja käyttötarkoituksesta) laivan pohjan alle kääntö- ja veto-laitteessa tai akustisia tärinää läpäisevässä paikallaan olevassa suojuksessa, ne on rakennettu laivan ulkokuoreen, asennettu laivan hinaamaan tai helikopterista laskettuun konttiin ja asennettu merenpohjan kannatinrakenteen päälle. Kompensaattori tuo toisistaan erotettujen hydrofonien sähköpiireissä virtaaviin vaihtovirtoihin vaihesiirron, joka vastaa eroa akustisten värähtelyjen saapumisajoissa näihin hydrofoneihin. Näiden siirtymien numeeriset arvot osoittavat kiinteän akustisen järjestelmän suuntakäyrän akselin ja kohteen suunnan välisen kulman. Vahvistuksen jälkeen sähköiset signaalit syötetään indikaattorilaitteeseen (puhelin tai katodisädeputki) suunnan kiinnittämiseksi kohinaiseen kohteeseen. Aktiivinen G:n generaattori. luo lyhytaikaisia sähköisiä impulssisignaaleja, jotka sitten värähtelijät lähettävät akustisten värähtelyjen muodossa. Niiden välisissä tauoissa kohteista heijastuneita signaaleja vastaanottavat samat vibraattorit, jotka on tällä kertaa kytketty "vastaanotto-lähetys" -kytkimellä sähköisten värähtelyjen vahvistimeen. Etäisyys esineisiin määräytyy osoitinlaitteessa heijastuneen signaalin viiveellä suhteessa suoraan (säteilytettyyn) signaaliin.
G. s., riippuen niiden tyypistä ja tarkoituksesta, toimivat infraäänen, äänen ja (useammin) ultraäänialueen taajuuksilla (kymmenistä Hz jopa satoja kHz), säteilee tehoa kymmenistä ti(jatkuvalla generoinnilla) jopa satoja kW(pulssissa) on suunnanhakutarkkuus yksiköistä asteen murto-osaan riippuen suunnanhakumenetelmästä (maksimi, vaihe, amplitudi-vaihe), akustisen järjestelmän taajuudesta ja koosta johtuvan suuntausominaisuuden terävyydestä sekä näyttötavasta. G:n toiminta-alue. vaihtelee sadoista metreistä kymmeniin tai enemmän km ja riippuu pääasiassa aseman parametreista, jotka heijastavat kohteen ominaisuuksia (kohteen voimakkuutta) tai sen melusäteilyn tasoa, sekä äänivärähtelyjen etenemisen fysikaalisista ilmiöistä vedessä (taitto ja jälkikaiunta) ja oman aluksensa liikkeen aiheuttaman vesivoimajärjestelmän toiminnan häiriöiden tasosta.
G. s. asennettu sukellusveneisiin, armeijan pinta-aluksiin ( riisi. 2 ), helikopterit ja rannikkolaitteistot sukellusveneiden torjuntaan liittyvien ongelmien ratkaisemiseksi, vihollisen etsimiseksi, sukellusveneiden kommunikoimiseksi keskenään ja pinta-alusten kanssa, tiedon tuottamiseksi ohjustorpedojen ja torpedojen laukaisua varten, navigointiturvallisuus jne. Niitä käytetään navigointiin, kalapitoisuuksien etsimiseen, valtameritutkimukseen ja hydrologiseen työhön, viestintään sukeltajien kanssa ja muihin tarkoituksiin.
Lit.: Karlov L. B., Shoshkov E. N., Hydroacoustics in sotilasasioissa, M., 1963; Prostakov A.L., Hydroacoustics in Foreign Fets, L., 1964; hänen, Hydroacoustics and ship, L., 1967; Krasnov V.N., Sijainti sukellusveneestä, M., 1968; Horton J., kaikuluotaimen perusteet, käänn. Englannista, L., 1961.
S. A. Barchenkov.

- - joukko toimenpiteitä sukellusveneiden ja pinta-alusten järjestelmien ja mekanismien ulkoisten akustisten ominaisuuksien tason vähentämiseksi ...
Sotilaallisten termien sanakirja
- - saada tietoa vihollisesta hydroakustisin keinoin vastaanottamalla, tallentamalla ja analysoimalla laivan, torpedon jne. lähettämiä tai heijastamia akustisia värähtelyjä.
Sotilaallisten termien sanakirja
- - monimutkainen akustinen, sähköinen ja elektroniset laitteet äänivärähtelyjen lähettämiseen tai vastaanottamiseen vedessä. Erottele G. kanssa. passiivinen, vain värähtelyä vastaanottava ja aktiivinen, säteilevä ja vastaanottava värähtely...
Suuri tietosanakirja ammattikorkeakoulun sanakirja
- - akustiset ilmailuvälineet sukellusveneiden etsimiseen. Se on aktiivinen-passiivinen hydroakustinen asema, joka lasketaan helikopterista kaapelilla vesipatsaan...
Meren sanasto
- - vedenalaisen tilanteen havainnointinauha, joka on järjestetty hydroakustisten keinojen avulla ...
Meren sanasto
- - sukellusveneiden ja pinta-alusten piilottaminen vihollisen luotaintiedustelulaitteilta ...
Meren sanasto
- - eräänlainen tekninen tiedustelu, jonka aikana tietoa vihollisesta saadaan vastaanottamalla, rekisteröimällä, käsittelemällä ja analysoimalla vastaanotetut hydroakustiset signaalit ...
Meren sanasto
- - laite, jota käytetään vastaanottamaan tai lähettämään ja sitten vastaanottamaan akustisia tärinöitä vedessä. Käytetään laajasti laivoissa, ilmailussa ja rannikkoalueilla...
Meren sanasto
- - laitteet, jotka koostuvat meren kiinteisiin paikkoihin asennetuista äänen lähettäjistä ja laivoissa olevista vastaanotto-osoittimista hydroakustisista laitteista, joissa on kronometri ja tallennin ...
Meren sanasto
- - laite, joka vastaanottaa ja lähettää hydroakustisia signaaleja vedessä ja jolla on spatiaalinen selektiivisyys ...
Meren sanasto
- - hydroakustinen asema, joka on suunniteltu saamaan tietoa tilanteesta shokkikerroksen alla ...
Meren sanasto
- - asennus tasa- tai vaihtovirtasähkögeneraattorilla sähköenergian tuottamiseksi ja sen toimittamiseksi kuluttajille ...
Meren sanasto
- - "... Tekninen laite, joka vastaanottaa tai lähettää hydroakustisen signaalin ja tarjoaa yhdessä aseman tai kompleksin laitteiston kanssa sen tilaselektiivisyyden ...
Virallinen terminologia
- - ".....
Virallinen terminologia
- - ".....
Virallinen terminologia
- - joukko kaavamaisesti ja rakenteellisesti toisiinsa liittyviä akustisia, sähköisiä ja elektronisia laitteita ja laitteita, joiden avulla vastaanotetaan tai lähetetään tai vastaanotetaan ja lähetetään akustisia ...
Suuri Neuvostoliiton tietosanakirja
"Hydroakustinen asema" kirjoissa
kohdeasema
Kirjasta KATKAAN TAKAISIN, tai matkusta hitaasti liikkuvissa saappaissa. Tarinoita. kirjoittaja Chirkov Vadim AleksejevitšKohdeasema Isälleni omistettu Juna vei Aleksein sotaan. Sotaan, Aleksei tiesi, sotaan, hän ajatteli kiipeäessään vaunuihin, asettaen hitaasti kassinsa kerrossänkyyn ja irrottaen päällystakkinsa koukut; sotaan - vaikka hänet opetettiin sanomaan: edessä. Agenda
YDINVOIMALA
Kirjasta Valitut teokset. T. I. Runoja, tarinoita, tarinoita, muistelmia kirjoittaja Berestov Valentin DmitrievichYDINLAITOS Leveä raivaus on joutomaa. Älä värähtele sinisiä männyn neuloja. Hiljainen, valkoinen, kuin luostari, Atomin asuinpaikka nousi, sen salaperäisissä seinissä, hiljaisuudessa, jonka Pyhä elämä vannoi, kuin munkki, Eräs elää - mahtava atomi. Täällä, jolla on helvetin voima, mutta helvetin tahto
asema
Kirjasta Unen muisti [Runot ja käännökset] kirjoittaja Puchkova Elena OlegovnaAsema, jota en tiedä, pitäisikö minun lähteä? Katso ja sylkee kaikkiin maisemiin hautausmaista. Kävin jopa kaikissa järjettömissä hautajaisissa, jalkoihini vanhoissa sanomalehdissä. Ja myi ja joi kaiken viinin, ja runoutta varten - oli vain vettä, ja minä kuolin kaivon reunalla. A
Kazbekin asema
Kirjasta Konstantin Korovin muistelee ... kirjoittaja Korovin Konstantin AleksejevitšKazbekin asema Varhain aamulla heräsin pieneen valoon. Koko Terekin laakso oli sumun ja tummien pilvien sinisessä, ja Kazbekin huippu erottui korkealta turkoosilta taivaalta ja muuttui lumesta vaaleanpunaiseksi varhain aamun sarastaessa. Kun vuokrasin kärryn, keräsin maaleja, maalaustyökaluja
VESIASEMA
Kirjasta Venäjä keskitysleirillä kirjailija Solonevitš IvanVESIASEMA Dynamon vesiasema sijaitsi Onegajärven rannalla. Ja Moskovassa, Pietarissa ja Medgorassa Dynamon vesiasemat olivat korkeimman, pääasiassa KGB:n, aristokratian turvapaikka. Siellä oli buffet GPU-osuuskunnan hinnoilla,
Rautatieasema
Kasakkojen kirjasta kirjoittaja Mordyukova Nonna ViktorovnaRautatieaseman juhlia Kubanissa kutsutaan "sabantuiksi". Naiset työskentelevät myös säännöllisesti pöydän ääressä: he vaihtavat lautasia huomaamattomasti, antavat ruokaa tarvitseville, tarjoilevat mukeja hillokkeen tai hyytelön kera, ja tällainen "ruoka" lauluna tarjoillaan samalla tavalla. Aluksi näyttää siltä
Chir-asema on hiljainen
Kirjasta Adjutantti Pauluksen muistelmat Kirjailija: Adam WilhelmKatkaisuasema
Kirjasta Kun olin pieni, meillä oli sota kirjoittaja Olefir Stanislav MikhailovichSilppuamisasema Kävi niin, että meillä ei ollut talossamme edes kourallista muroja konderin keittämiseen - nestemäinen keitto muutamassa jyvässä, ilman perunoita ja mausteita. Kaikki toivo oli leipää, jonka isä sai kortille. Isä leikkasi sen tasaisiksi viipaleiksi, ja koko perhe
Chir-asema on hiljainen
Kirjasta Katastrofi Volgalla Kirjailija: Adam WilhelmStation Chir hiljeni Väsymys lopulta voitti minut. Mutta unelma, joka toi unohduksen, ei kestänyt kauan. Noin kello kahdelta aamulla minut heräsi epäseremoniattomasti. Edessäni oli eversti Arnold, armeijan viestintäpäällikkö. - Chirin aseman komentaja ei enää vastaa. Minun linjamieheni
Morozovskajan asema
Kirjasta One Life - Two Worlds kirjoittaja Alekseeva Nina IvanovnaMorozovskajan asema Varhain aamulla saavuimme hiljaiselle, rauhalliselle Morozovskajan asemalle. Juna hajotettiin täällä, armeijan vaunut irrotettiin yleisjunasta, nousimme pois ja päätimme pitää tauon, odottaa.
asema
Kirjasta Luojat ja monumentit kirjoittaja Jarov Roman EfremovichAsema Gorjatshkinin elämässä kaikki olisi hyvin, mutta on huonoa, että autoja ei ole testata. Hänellä on paljon teoreettisia töitä, joitain säännönmukaisuuksia on todettu. Meidän on nyt rakennettava koneita ja testattava niitä. On aika ilmentää metallitutkimuksesi tuloksia ja missä se on
hydroakustinen asema
Kirjailijan kirjasta Great Soviet Encyclopedia (GI). TSBasema
Kirjailijan kirjasta Great Soviet Encyclopedia (ST). TSBTelakka-asema
Kirjasta Muistikirja aloittelijoille. Mobiili, saavutettava, kätevä kirjoittaja Kovalevski Anatoli JurievichTelakointiasema Telakointiasema (modulaarinen asema, telakointiasema, telakointiasema, kehto, Docing Station, Docking Station, Desk Station, Slice Station, Cradle) on erityinen kannettavan tietokoneen teline, joka laajentaa ominaisuudet ja laskentaresurssit pöytätietokoneen tasolle. Loppujen lopuksi mikä tahansa
asema
Kirjasta Age Chauvinism (joulukuu 2007) kirjoittaja Venäjän elämä-lehtiTukiasema on syöksynyt pimeyteen. Ei asemarakennuksessa eikä asemataloissa - ei pilkkuakaan. Minä, naiivi, tutkin karttaa, ajattelin, että menisin Vokzalnaya-katua pitkin Gagarin-kadulle, ja sitten pääsen keskustaan jollakin, ottaisin taksin, jos mitään. Kyllä, juuri nyt. Tässä täydellisessä pimeydessä
1. Keskipitkän uppoutuman sukellusveneen havaintoetäisyys 20 solmun etsintänopeudella ja rajoittamattomissa hydroakustisissa olosuhteissa on 25 - 40 km.
2. Mediaanivirheet koordinaattien määrittämisessä:
Suuntakulma - enintään 0,5°;
Etäisyyden mukaan - enintään 0,8% asteikon nimellisarvosta.
3. Asema tarjoaa yleiskatsauksen horisontissa olevasta vesitilasta suuntakulmissa 0 - 150° oikealle ja vasemmalle. Samanaikainen katselu pystytasossa johtuu tämän tason suuntausominaisuudesta (4°), katselukulman laajentamiseksi pystytasossa on mahdollista kallistaa akustista antennia jopa 60° alas ja 10° ylös.
4. Kuolleen alueen koko 1,5 - 2 km etäisyydellä.
a) tunnistustilassa - noin 4 ° lähetettäessä ja vastaanotettaessa vaaka- ja pystytasossa;
b) saattajatilassa:
Taajuudella f 1 - noin 4 °;
Taajuudella f 2 - noin 6 ° säteilylle ja vastaanotolle vaaka- ja pystytasossa.
6. Akustiseen antenniin syötettävä sähköteho on vähintään 200 kVA.
7. Asemainstrumentit on suunniteltu normaaliin toimintaan seuraavissa olosuhteissa:
Ympäristön lämpötila 0 - +45°;
Kierrätys amplitudilla 10° ja jakso 8 s, pitching amplitudilla 5° ja jakso 5 s.
Aseman kokoonpano. Asema sisältää seuraavat pääinstrumentit ja laitteet:
Akustinen antenni, jossa on kääntyvä kallistuslaite (laite 1), joka on 4 m x 4 m litteä peili, johon on asennettu lieriömäiset pietsokeraamiset muuntimet (18 pystysuuntaista anturia, kussakin 8 anturia);
Generaattorilaite (laitteet 2, 2A, 22);
Ohjaus- ja valvontapaneeli (laite 4), johon on keskitetty lohkot aseman toiminnan osoittamiseksi, ohjaamiseksi ja valvomiseksi;
Esivahvistin- ja viivepiirit (laite 8);
Lähetys- ja vastaanottokytkimet (laite 13);
Doppler-ilmiön kompensointilaite (laite 17);
Tasasuuntaajat (laitteet 20, 20A);
Teholevyt (laitteet 21, 21A);
Säteilypolun ohjauslaite (laite 24A);
Akustisen säteen liikeradan rakentaja (laite 25).
2. GAS:n ulkoinen tiedonsiirto ja toiminta lohkokaavion mukaisesti.
Ulkoiset suhteet. Sukellusveneen pitkäaikaisen seurannan varmistamiseksi asemalla on yhteys seuraaviin laivainstrumentteihin ja järjestelmiin: loki, gyrokompassi, keskusvakautusjärjestelmä, MG-325-asema, Sprut-järjestelmä, MVU-200 ja 201.
Toimintaperiaate. Tarkastellaan aseman toimintaperiaatetta kuvassa 1 esitetyn lohkokaavion mukaisesti.
Asemalla on seuraavat toimintatilat:
Havaitseminen, jossa kohteiden haku suoritetaan 30 °:n välein ± 150 °:n näkökentässä ja kohdemerkintä seurantapolulle;
Havaitseminen - seuranta, jonka avulla, kun kohdetta seurataan kurssikulmaa pitkin seurantapolun indikaattorilla IE2, voidaan samanaikaisesti tarkastella 30 °:n sektoria tunnistusilmaisimella IE1;
Mukana, jossa luodaan kohteen tarkat koordinaatit - suuntakulma ja etäisyys;
Kuuntelee kohdekohinaa laajalla taajuuskaistalla.
Tunnistustilassa akustinen energia säteilee lähes samanaikaisesti 30° sektorissa. Tässä tapauksessa (säteilyn aikana) muodostuu yhdeksän suuntakäyrää, kukin 4°, vastaanotettaessa osoitettu sektori peittyy kahdeksalla suuntaominaisuudella. Akustinen antenni on kytketty lähetys- ja vastaanottopolkujen laitteistoon vastaanotto-lähetyskytkimen avulla.
Vastaanottotiellä kukin akustisen antennin 18 kaistasta on kytketty omaan esivahvistimeensa vastaanotto-lähetyskytkimen kautta. Esivahvistimien lähdöt on kytketty vastaanottopolun laitteisiin, jotka varmistavat aseman toiminnan tunnistus-, seuranta- ja kuuntelutiloissa.
Kun kohde on havaittu, suoritetaan karkea määritys kohteen suunnasta, etäisyydestä siihen ja kohdemerkinnän myöntämisestä seurantapolulle.
Havaitsemis-seurantamoodissa kohteen seuranta suoritetaan keskeisellä suuntaominaisuudella, ja tunnistus 30°:n sektorin sisällä on symmetristä seurattavan kohteen suunnan suhteen.
Seurantatilassa kohdekoordinaatit tarkentuvat, kohteen puoliautomaattinen seuranta suunnan kulman ja etäisyyden mukaan sekä tiedonsiirto PSTB, MVU-200, 201 järjestelmään. Kuuntelutilassa kohteet tunnistetaan niiden aiheuttaman kohinan perusteella. Kuuntelu voidaan suorittaa ±150°:n sektorissa.
Hakusektorin sisällä akustista antennia voidaan siirtää 30° kanavaaskelin automaattisen askelhaun avulla tai manuaalisesti. Kuunneltaessa antennia pyöritetään manuaalisesti tai puoliautomaattisella järjestelmällä.
Vastaanotettujen signaalien ilmaisu suoritetaan:
Havaintotilassa - ilmaisimella IE-1, joka on tehty katodisädeputkeen, jossa on "B"-skannaus ja signaalin kirkkausmerkki käytettäessä monikanavaista näyttöjärjestelmää, ja amplitudilla - kaiuttimessa ja nauhurissa;
Seurantatilassa - elektronisella osoittimella IE-2 (laakerin poikkeaman ilmaisin), joka on tehty kaksisäteiseen elektroniseen putkeen, jossa on lineaarinen pyyhkäisy, ja etäisyystallentimella, tallentamalla kaikusignaali sähkömekaaniselle paperille;
Kuuntelutilassa - kaiuttimessa ja puhelimissa.
1. Hydroakustinen asema lasketulla antennilla MG-329.
Esimerkki hydroakustisesta asemasta, jossa on alennettu akustinen antenni, on MG-329-asema. Asema on tarkoitettu sukellusveneiden vastaisten alusten, laivojen ja erikoisalusten aseistamiseen ja mahdollistaa sukellusveneiden havaitsemisen ja niiden koordinaattien (suuntiman ja etäisyyden) määrittämisen. Sukellusveneiden etsintä ja havaitseminen suoritetaan vain laivan juurella.
Hydroakustisessa ohjaamossa - pulssigeneraattori, vahvistin, ohjaus- ja valvontalaite, teholaite ja syvyysosoitin;
Yläkerroksessa on erityisessä kasetissa oleva laskulaite vinssin ja nosturin palkin välittömässä läheisyydessä. Laskettu laite koostuu kahdesta osastosta: tulvitusta ja suljetusta osastosta. Tulvassa osastossa on ja esivahvistin. Suljetussa lokerossa on antennin pyörimisohjain, suunta-anturi ja syvyysanturi.
Asemalla on neljä toimintatilaa: melun suunnan haku (SHP), manuaalinen seuranta (RS), etäisyyden määritys (OD), aktiivinen vaiheittainen haku (AP).
Asema tarjoaa:
Kohteen tunnistus avaruuden ympyränäkymän aikana SHP-tilassa;
Suuntiman määrittäminen kohteeseen;
Etäisyyden mittaaminen kohteeseen;
Vesialueen automaattinen vaiheittainen kartoitus.
Aseman MG-329 suorituskykytiedot:
8 solmun nopeudella 50 metrin syvyydessä suotuisissa hydroakustisissa olosuhteissa SHP-tilassa ohjaavan sukellusveneen havaintoalue on 50 ohjaamoa, AP- ja OD-tiloissa - 33 ohjaamoa;
Mediaanivirhe etäisyyden määrittämisessä on 3 % asteikosta;
Asema voi toimia 3 - 4 pisteen meritilassa ja laivan ajelehtiman ollessa enintään 1,5 solmua;
Akustisen antennin suurin upotussyvyys on 50 m;
Akustisen antennin upotusaika (nousu) enimmäissyvyyteen on 70 s;
Vesialueen yksittäisen tutkimuksen aika, ottaen huomioon akustisen antennin laskun ja noston: SH-tilassa - 3 min, AP-tilassa - 6,5 min, molemmissa tiloissa - 7 min;
Asema on käyttövalmis 3 minuutissa päälle kytkemisen jälkeen;
Jatkuvan toiminnan kesto on enintään 4 tuntia;
Asema toimii kahdella taajuusstandardilla; vastaanottopolun kaistanleveys:
SHP-tilassa - 2500 Hz,
AP- ja OD-tiloissa - 60 Hz;
Akustisen antennin pyörimisnopeus SHP-tilassa on 4 rpm;
Näkökulma askelkonetta harjoitellessa 15 °;
Suuntauskäyrän leveys kaikissa tasoissa 20°;
Asema saa virtansa kolmivaiheisesta 220 V:n, 400 Hz:n vaihtojännitteestä ja 27 V:n vakiojännitteestä;
Tehonkulutus AC-verkosta 400 VA, DC-verkosta - 200 kW;
Vinssin DC-verkosta käyttämä teho on 2 kW.
Keskimääräinen laakerivirhe 5°;
Aseman toimintakaavio on esitetty kuvassa 1
SHP-tilassa suunnanmääritys suoritetaan maksimimenetelmän mukaan. Kun ohjaus- ja valvontalaitteen työtyypin “ShP-RS-AP” kytkin on asetettu “ShP”-asentoon, ohjausyksikön EM-1M-moottorin virityskäämiin syötetään virtaa. Koska EM-1M-moottori pyörittää jatkuvasti S-3V-selsyn-roottoria nopeudella 4 rpm, antenni pyörii samalla nopeudella.
Induktiivinen anturi, joka on jäykästi kiinnitetty alas lasketun laitteen runkoon, tuottaa kolmivaiheisen jännitteen riippuen rungon kiertokulmasta magneettiseen meridiaaniin nähden.
Differentiaaliselsynissä laskeutuvan laitteen kiertokulmat suhteessa magneettiseen meridiaaniin ja akustisen antennin kehoon nähden lasketaan yhteen. Tämän seurauksena syntyy virhesignaali, joka määrittää akustisen antennin kulma-asennon suhteessa magneettiseen meridiaaniin. Ohjaus- ja valvontalaitteen modulaattorilohkon nuoli osoitin kiinnittää tämän kulman, joka on yhtä suuri kuin suuntima kohteeseen.
Koska VTM-1V sinikosinimuuntajan roottori pyörii synkronisesti akustisen antennin kanssa, sen staattorikäämeihin indusoituu jännitteitä, jotka muuttuvat antennin kiertokulman sini- ja kosinilain mukaan meridiaaniin nähden. Havaitsemisen jälkeen sini- ja kosinikomponentit asetetaan katodisädeputken levyille, mikä määrittää säteen sijainnin näytöllä. Kun akustinen antenni pyörii jatkuvasti WB-tilassa, ilmaisinnäytön säde kuvaa rengasta.
Näin ollen ohjaus- ja valvontalaitteen osoitinnäytöstä ja nuoliosoittimesta voidaan määrittää tiedot antennin suuntauskäyrän akselin sijainnista suhteessa magneettiseen meridiaaniin.
Akustisen antennin vastaanottama kohina muunnetaan sähköjännitteeksi. Tämä jännite syötetään esivahvistimen tuloon "Receive-transmit" -kytkimen kautta. Vahvistimen lähdöstä signaali syötetään kaapelikaapelin kautta vahvistimen tuloon. Vahvistuksen jälkeen signaalijännite syötetään taajuusmuuttajaan, joka koostuu sekoittimesta, paikallisoskillaattorista ja alipäästösuodattimesta. Muuntimen lähdössä syntyy äänitaajuusjännite, joka syötetään kuulokkeisiin ja taustavalovahvistimeen ja siitä taustavaloputken modulaattoriin. Lisäksi tämä signaali syötetään vahvistimen kantatunnistimeen. Perustunnistimen kuorma on modulaattoriyksikön magneettimodulaattorin ohjauskäämi.
Magneettimodulaattorin työkäämit on kytketty sarjaan 200 V, 400 Hz:n piiriin ohjausyksikön pyörivien muuntajien VTM - 1V roottorikäämien ja muuntajan kiertomekanismin ja referenssijännitemuuntajan ensiökäämien kanssa. Kun signaali kohteesta vastaanotetaan kantatunnistimen tuloon, magneettimodulaattorin ohjauskäämin läpi kulkeva tasavirta muuttuu. Tämä johtaa syöttöjännitteen uudelleen jakautumiseen toimivan magneettimodulaattorin ja pyörivien muuntajien VTM - 1V roottorikäämien välillä, minkä seurauksena jännite muuttuu myös staattorin käämeissä VTM - 1V, mikä johtaa säteen radiaaliseen taipumiseen CRT-näytöllä.
Siten sillä hetkellä, kun akustisen antennin suuntakäyrä ohitetaan kohdetta pitkin, CRT:n rengasmaisessa pyyhkäisyssä havaitaan amplitudimerkki, jonka hehkun intensiteetti on hieman suurempi kuin pyyhkäisyn hehkun intensiteetti.
PC-tilassa syöttöjännite poistetaan moottorin ohjauskäämistä EM - 1M ja moottori pysähtyy. Akustisen antennin pyörittäminen tapahtuu käsipyörän avulla manuaalista seurantaa varten. Muuten asema toimii samalla tavalla kuin SHP-tilassa.
Akustisen antennin satunnaisten käännösten vaikutuksen eliminoimiseksi asemalla otettiin käyttöön antennin asennon stabilointi kaikissa toimintatiloissa.
Asema siirretään PC-tilasta OD-tilaan painamalla ohjaus- ja valvontalaitteen käynnistyspainiketta. Kun käynnistyspainiketta painetaan, rele P2 aktivoituu.
0,15 sekunnin kuluttua releen P2 aktivoitumisesta nokkamekanismi avaa liipaisupulssin muodostuspiirin lukituskoskettimet. Liipaisupulssin generointipiiri tuottaa pulssin, joka käynnistää pulssigeneraattorin. Pulssigeneraattorin lähdöstä kytkimen "Vastaanotto - lähetys" kautta videopulssi tulee akustiseen antenniin, muunnetaan akustiseksi pulssiksi ja säteilee. 0,2 s pulssin lähettämisen jälkeen nokkamekanismi avaa releen P3 kytkentäkoskettimet. Rele katkaisee virran ja poistaa vaihtojännitteen sammutuspiiristä, ja CRT-näytössä alkaa pyyhkäisy. Aikaviive on välttämätön moottorin inertian aiheuttaman pyyhkäisyn epälineaarisen osan eliminoimiseksi. Siten varmistetaan säteilyn alkamisen ja pyyhkäisyn alun synkronointi. Lisäksi tallennuslaitteesta poistetaan jännite ja "Receive-transmit" -kytkin kytkee aseman vastaanottamaan.
Heijastuneen signaalin läsnäollessa kulku vastaanottoreitillä ja sen ilmaisu CRT-näytöllä ja puhelimissa tapahtuu samalla tavalla kuin SHP-tilassa.
8,8 s jälkeen, mikä vastaa koko pyyhkäisyn kestoa näytöllä, ts. signaalin kulkuajan maksimietäisyydellä olevaan kohteeseen ja takaisin, nokkamekanismi sulkee releen P3 kytkentäkoskettimet. Tästä johtuen käynnistyspainike vapautuu, vahvistimen lähtö on kytketty taustavalon vahvistimeen, vaihtojännite poistetaan vaimennuspiiristä ja moottorin syöttöjännite. Jarrupiiri syöttää jarrutusjännitettä moottoriin ja moottori pysähtyy. Koska sammutuspiiri ei toimi, putken näytölle tulee pyyhkäisy. Vahvistimen suodattimen kytkentärele poistaa 600 Hz suodattimen käytöstä. Releen toimintatapakytkin P1 kytkee jälleen pyörivän muuntajan VTM - 1V staattorikäämitykset nostomuuntajiin. asema siirtyy automaattisesti PC-tilaan. Jos haluat mitata etäisyyden kohteeseen uudelleen, sinun on painettava käynnistyspainiketta.
2. Hydroakustinen asema hinattavalla antennilla MG-325.
Esimerkki kaikuluotaimesta, jossa on hinattava akustinen antenni, on asema MG - 325, joka on suunniteltu etsimään, havaitsemaan ja määrittämään sukellusveneiden koordinaatit epäsuotuisissa hydrologisissa olosuhteissa, kun akustisilla akustisilla antenneilla varustettujen luotainten käyttö sukellusveneiden havaitsemiseen on vaikeaa. Laivat pr. 159, 1123, 1134B, 1135 ovat aseistautuneet asemalla.
Laivan asemalaitteet sijaitsevat:
Hydroakustisessa ohjaamossa - ilmaisinlaite ja laukaisulaite;
Hydroakustisella osastolla - generaattori, generaattorin virtalähde, pulssi
polarisaattori ja akut;
Yläkerroksessa - vinssi, nosto-lasku- ja hinattavat laitteet.
Hinattavassa laitteessa on 2 osastoa: hermeettinen, johon on sijoitettu vahvistin, sovituslaite ja vuotoanturi, ja tulvinut, johon on sijoitettu akustinen antenni, joka koostuu säteilevistä ja vastaanottavista osista sekä muuntimesta, joka on suunniteltu lähettämään ja vastaanottamaan akustisia tärinöitä aseman toiminnan ohjaustarkastuksen aikana.
Asema toimii aktiivisessa tilassa ja tarjoaa:
Sukellusveneiden etsintä ja havaitseminen;
Etäisyyden määrittäminen kohteeseen ja suuntakulma (suuntima) kohteeseen;
Kohteen koordinaattien (etäisyys ja suuntakulma) antaminen luotainasemalle koordinaattien ja palonhallintalaitteiden tarkkaa määritystä varten.
Taktinen - tekninen tietoasema MG - 325:
Sukellusveneen havaintoetäisyys 25 solmun laivan nopeudella vedenalaisessa äänikanavassa on 4-7 km;
Mediaani suunnanhakuvirhe suhteessa hinattavaan laitteeseen 3°;
Mediaanietäisyysvirhe: 1,5 % 7,5 km:n asteikolla ja 2 % 3,75 km:n asteikolla.
Vesialueen tarkastelun työsektori on 250° hinattavan laitteen kulkua pitkin;
Hinattavan laitteen säätö ja nostaminen on mahdollista, kun meri on enintään 3 - 4 pistettä;
Hinaussyvyys voi vaihdella 15 - 100 m;
Hinattavan laitteen tarkkuus tasaisella hinausnopeudella: mukaan
rulla ± 3°, syvyys ± 2 m;
Asema toimii yhdellä kolmesta taajuusstandardista;
Antennin säteilevään osaan syötetty sähköteho, vähintään 100 kW;
Lähetettyjen pulssien kesto on 25 ja 5 ms;
Akustisen antennin suuntakäyrän ratkaisu tasolla 0,7 säteilevän osan pystytasossa on 14°, vaakasuorassa - 270°, vastaanotto-osassa molemmissa tasoissa - 14°;
Asemalaitteisto on suunniteltu toimimaan ympäristön lämpötilassa -10 - +50 °C tärinäolosuhteissa taajuusalueella 5–35 Hz kiihtyvyydellä 1 g laivalla sijaitseville laitteille ja alueella 15–20 Hz kiihtyvyydellä 2 g hinattavassa laitteessa;
Aseman virransyöttö kolmivaihevirrasta 220 V, 50 Hz;
Tehonkulutus 6,5 kVA;
Aseman massa on 5300 kg.
Aseman yksinkertaistettu toimintakaavio on esitetty kuvassa 4. Asema toimii kaiun suunnan hakutilassa. Generaattorista vinssin virrankerääjän, kaapeliköyden ja sovituslaitteen kautta tulevat pulssit saapuvat akustisen antennin säteilevään osaan, jossa ne muunnetaan akustisiksi värähtelyiksi. Samalla käynnistetään pyyhkäisy sektorinäkymän ilmaisimen etäisyyttä pitkin, joka on suunniteltu kohteiden visuaaliseen tarkkailuun suorakaiteen muotoisissa koordinaateissa (etäisyys - suuntakulma). Signaali lähetetään 250°:n sektorissa hinattavan laitteen matkalla. Säteilyn jälkeen asema siirtyy automaattisesti vastaanottotilaan.
Vedenalaisesta kohteesta heijastuvat akustiset signaalit havaitaan akustisen antennin vastaanottoosassa, jossa ne muunnetaan akustisiksi signaaleiksi ja syötetään sitten 26 esivahvistimeen antennivastaanottimien lukumäärän mukaan. Vahvistuksen jälkeen signaalit saapuvat kompensaattoriin, joka muodostaa 20 spatiaalista vastaanottosuuntaominaisuuksia (20 kanavaa). Siten suunnattu vastaanotto suoritetaan 250° sektorissa. Kompensaattorin lähdöstä signaalit syötetään 20 päävahvistimeen kanavien lukumäärän mukaan, joissa signaalin työtaajuus muunnetaan välitaajuudeksi ja sen lisävahvistus tapahtuu. Päävahvistimien lähdöt on kytketty sektori- ja askelnäkymäkytkimien tuloihin.
Sektorinäkymän elektroninen kommutaattori kytkee vuorotellen päävahvistimien lähdöt sektorinäkymän ilmaisimeen. Vaihtojakso tapahtuu synkronisesti kulkusuuntapyyhkäisyn kanssa. Tästä johtuen sektorinäkymän ilmaisimen näytölle muodostuu kahden koordinaatin vaakasuuntainen skannausetäisyys - suuntakulma.
Sektorinäkymää käytetään sukellusveneitä etsittäessä. Kaikusignaali tallennetaan sektorinäkymän ilmaisimen näytölle kirkkausmerkin muodossa, jossa etäisyys ja suuntakulma määräytyvät sen sijainnin mukaan. Suuntakulma (suuntima) kohteeseen nähden määritetään suhteessa hinattavaan laitteeseen laskemalla vaakatasossa oleva kulma kaikusignaalin saapumissuunnan ja hinattavan laitteen diametraalisen tason (todellisen pituuspiirin) välillä.
Kun vedenalainen kohde havaitaan, käyttäjä yhdistää kanavakytkimen avulla kanavan, jossa signaali on havaittu, stepper-näkymän ilmaisimeen. Kanavavaihto suoritetaan tässä tapauksessa vaiheittaisella kytkimellä, jossa on kanavien taajuudensäätö. Stepper view -ilmaisimen näytölle muodostetaan etäisyyspyyhkäisy synkronisesti pulssiemission kanssa. Heijastetun signaalin saapumishetkellä havaitaan amplitudimerkki. Näin etäisyys valitussa kanavassa (suunta) määritetään askelnäkymän ilmaisimen avulla.
Sektorinäkymän ilmaisinta käytetään kohteen seuraamiseen.
Kävelypolku sisältää kuulopolun, jonka avulla voit kuunnella kaikusignaalia puhelimista ja kaiuttimista. Kuulokanavan liittäminen käyttäjän valitsemaan kanavaan tapahtuu samanaikaisesti kanavakytkimen Stepper View -ilmaisimen kytkemisen kanssa.


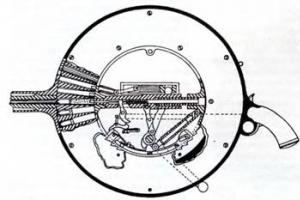
Kuva 2. GAS MG-325:n rakennekaavio.
1. Tarkoitus, ratkaistavat tehtävät, aseman kokoonpano, MG-7-luotaimen sijoitus.
2. GAS MG-7:n toimintatavat, toimintaperiaate, suorituskykyominaisuudet.
Kirjallisuus:
1. GAS MG-7:n tekninen kuvaus.
2. Lomake GAS MG-7.
3. GAS MG-7:n käyttöohjeet.
I. Tarkoitus, tehtävät, aseman kokoonpano, sijainti.
1. Laivassa oleva luotainasema MG-7 on asennettu pinta-aluksiin ja se on suunniteltu ratkaisemaan seuraavat tehtävät:
Vedenalaisten sabotaasivoimien ja keinojen havaitseminen (PDSS);
Havaittujen kohteiden koordinaattien määrittäminen (etäisyys, suuntakulma).
2. GAS MG-7:ää käytetään, kun laivat ovat ankkuroituina tai tynnyreinä ohjattavissa olevilla tukikohdilla ja suojaamattomilla tiellä.
3. Hydroakustinen asema MG-7 sisältää seuraavat laitteet:
Laite 1 - hydroakustinen antenni;
Laite 2 - anturin pulssigeneraattori;
Laite 4 - tärkein elektroninen ilmaisin
Laite 5 - virtalähde;
Laite 6 - elektroninen etäilmaisin;
Laite 13 on monikanavainen esivahvistin, jossa on elektroninen kytkin.
GAS MG-7 -laitteiden käyttötarkoitus ja sijoitus on esitetty taulukossa. 1.
II. Toimintatapa, toimintaperiaate, aseman suorituskykyominaisuudet.
4. Asemaa käytetään seuraavissa tiloissa;
I - täyden tehon tila;
II - pienitehoinen tila (25% kokonaissäteilytehosta);
III - käyttäjän suorittama kohteen jäljitelmä ja vahdinpito.
Taulukko 1 LAITTEIDEN TARKOITUS JA SIJOITUS GAS MG-7
Nimi Laitteen käyttötarkoitus Asennuspaikka
Laite 1 Sähkösignaalin muuntaminen - Yläkerros
hydroakustisessa säteilyssä; luotain - alus suojassa
tic sähköön, niiden vahvistus ja kotelon purkaminen
tektirovanie vastaanotossa; yhden muodostuminen
vastaanottavia ominaisuuksia
Laite 2 Sähkö-Hydroakustisen muodostuminen ja syntyminen
tarvittavan pituiset ric-pulssit - leikkaus
muotoutuu ja muotoutuu aseman toimintataajuudella
Laite 4 Hydroacousticin kaikusignaalien vahvistus ja osoitus
tavoitteet PPI-näytöllä, virran määrittäminen
kohdekoordinaatit, tilan ohjaus
Mami työ, työnohjaus
aseman instrumenttien tarkkuus.
Laite 5 Jännitteen muodostus ja stabilointi Hydroakustinen
zhenii virtalähdelaitteet asemakaappi
Laite 6 Osoittaa kaikusignaaleja kohteesta BIP:ssä
PICO näyttö. Sähkön muodostuminen
kaikusignaalit
yhdestä tai kahdesta kohteesta, ohjaus
simulointiyksikön toimintatilat,
kahden GAS MG-7:n synkronointi yhden kanssa
tilapäistä työtä laivalla
Laite 13 Heijastetun hydroakustiikan vahvistus
signaalit, sähköinen äänestys
vastaanotinkanavat ja niiden sarjat
yhteys ICO:han
5. Toimintaperiaate
Aseman toiminta perustuu pulssikaikuluotaimen periaatteeseen.
Ohjausyksikkö BU-2 generoi suorakaiteen muotoisia pulsseja, joiden kesto on t=0,5 ms toistojaksolla Tsl = 533 ms, jotka syötetään mittauspulssigeneraattoriin, joka tuottaa pulsseja, joiden kesto on t=0,5 ms korkeataajuisella täytöllä. Generaattorin lähdöstä nämä pulssit syötetään hydroakustiseen emitteriin (I) suuntaamattomalla säteilyllä vaakatasossa ja kapeasti suunnattuna pystysuorassa tasolla 0,7 (kuva 1). Kohteesta heijastuneet signaalit saapuvat suunnasta riippuen vastaaviin hydroakustisiin vastaanottimiin (HAP), jotka muodostavat tilastollisen tuulettimen vastaanottoantennin suuntausominaisuuksista, jotka risteävät tasolla 0,5 (kuva 2), muunnetaan sähköisiksi signaaleiksi, vahvistetaan suurtaajuusvahvistimella, jossa on automaattinen vahvistuksen säätö (UHFl) tai ilmaistava AGC (UHFl). Tällöin työkanavien ulostuloon allokoidaan signaalin matalataajuinen verhokäyrä, ts. videosignaali. Signaalit 32 kanavan lähdöistä syötetään elektroniseen kytkimeen, joka suorittaa kanavien sarjakyselyn kyselytaajuudella f=1920 Hz. Heijastetun signaalin keston aikana kytkin pollaaa kutakin kanavaa kerran. CRT-säteen pyyhkäisyn synkronoimiseksi kanavakyselyn kanssa 1920 Hz:n kyselytaajuus tulee elektronisesta kytkimestä ohjausyksikköön (BU-2), joka ohjaa skanneriyksikön (BR) toimintaa. Samaa tarkoitusta varten 1920 Hz signaali tulee etäosoittimen synkronointiyksikön (BS) kautta tämän ilmaisimen IE-yksikköön.
Skanneri tuottaa kolmivaiheisen sinimuotoisen jännitteen, jonka amplitudi vaihtelee sahanhammaslain mukaan (kuva 3), joka tuottaa säteen kierteisen kuvauksen katodisädeputkella (CRT).
CRT-säteen pyyhkäisemiseen käytetään 1920 Hz:n kyselytaajuutta, mikä varmistaa, että elektronisäteen sijainti CRT-näytöllä vastaa tietyn kanavan kyselyä. Joten esimerkiksi jokaisella ensimmäisen kanavan kyselyllä elektronisuihku on aina sektorissa 1 (kuva 2), toisen kanavan kyselyssä - sektorissa 2 jne. Jos kanavan tulo vastaanottaa kohteesta heijastuneen pulssin, joka ylittää kohinatason, niin tätä kanavaa pollattaessa amplitudivalitsimen (SA) tuloon liitetyn elektronisen kytkimen lähdöstä jännite ylittää asetetun kynnyksen ja SA-yksikkö lähettää vakioamplitudipulssin lopullisen videovahvistimen (VUO) tuloon.
Videovahvistimen vahvistamana tämä pulssi syötetään CRT-modulaattoriin ja valaisee näytön paikassa, jossa elektronisuihku sijaitsee signaalin saapumishetkellä (kuva 4).
Koska hydroakustinen järjestelmä on suunnattu alukseen nähden ja luotauspulssien lähettäminen on synkronoitu CRT-säteen pyyhkäisyn alkamisen kanssa, kirkkausmerkin sijainti näytöllä määrittää kohteen koordinaatit suhteessa alukseen etäisyyden ja suuntakulman suhteen.
Ottaen huomioon, että jälkikaiuntahäiriöiden ja signaalien taso syklin alussa on erittäin korkea ja laskee vähitellen, ja korkeataajuinen vahvistin (UHF AGC:llä) ei pysty täysin tasoittamaan signaalitasoa matkan yli. Kytkinlohko säätää automaattisesti tason kvantisointia (alarajakynnystä) kanavaryhmittäin (8 kanavaa kussakin) ja amplitudin valitsimen kynnyksessä on lisäksi tilapäinen automaattinen säätö (VAGC), joka varmistaa kynnyksen asteittaisen laskun syklin alusta loppuun. TVG-ohjaussignaalit tulevat BU-2-lohkosta synkronisesti pyyhkäisyn alkamis- ja mittauspulssien lähettämissignaalien kanssa. Amplitudivalitsimesta signaalit tulevat samanaikaisesti kaukoilmaisimen (laite 6) IE-lohkoon, jonka toiminnan synkronoidaan laitteen 4 BU-2-lohkolla laitteissa 4 ja 6 olevilla synkronointilohkoilla (BS), minkä vuoksi pääilmaisimen signaalit monistuvat kauko-ilmaisimen näytölle.
Laitteen 4 elektronisessa poimintayksikössä (SE) sijaitseva elektronisen tähtäimen (FEV) muotoilija, jota ohjataan lohkolla BU-2, generoi pulssin täyttötaajuudella 1920 Hz, joka syötetään VUO:lle ja sitten CRT:lle muodostaen elektronisen tähtäimen näytölle (ks. kuva 5).
Elektronisen tähtäimen arvo on verrannollinen tämän pulssin kestoon ja sitä muutetaan tarkkuuspotentiometrillä (PT), jonka asteikko on asteikoitu etäisyysyksiköissä. Elektronisen tähtäimen suunta asetetaan muuttamalla täyttöjännitteen vaihetta vaiheensiirtimellä (PV), jonka asteikko on asteikoitu suuntakulmiin.
Vaiheensiirtimen ja tarkkuuspotentiometrin asentoa muuttamalla on siis mahdollista asettaa elektronisen tähtäimen linjan pää mihin tahansa ruudun pisteeseen ja määrittää tämän pisteen koordinaatit vastaavilla (SE-yksikön) asteikoilla. SE-yksiköstä elektronisen tähtäimen muodostava signaali välitetään rinnakkain kaukoilmaisimen IE-yksikköön, jossa se toimii osoittimena operaattorin havaitseman kohteen sijainnista. Kaukosäätimen osoittimen tavoitekoordinaatit määräytyvät näytölle tulostetun asteikon mukaan.
Laitteen 6 simulointilohko (BI) generoi pulsseja, joiden kesto on 20-50 μs ja joiden säädettävä toistotaajuus on yhtä suuri kuin . Kun laitteiden 4 ja 6 IE-yksiköihin syötetään, pulssit valaisevat näytön (kirkkausmerkki), joka on samanlainen kuin kohteen merkki.
Ero pyyhkäisyjakson (Traz.) ja simuloinnin - (Timp.) toistojakson välillä antaa muutoksen kirkkausmerkin asennossa säteen (etäisyyden) mukaan.
Tämän signaalin vaiheen muuttaminen vaiheensiirtimellä mahdollistaa kohdetta jäljittelevän kirkkausmerkin siirtämisen mihin tahansa näytön sektoriin.
Kun yhdelle alukselle on asennettu kaksi asemaa (keulaan ja perään) ja niiden samanaikaisen toiminnan tarve, näiden asemien instrumenttien 6 synkronointiyksiköt kytketään toisiinsa, mikä saavuttaa luotauspulssien lähettämisen synkronoinnin ja vähentää koetuspulssien häiritsevää vaikutusta ja aseman jälkikaiunta.
6. Asemakartta sisältää sisäänrakennetun ohjauksen ja signaloinnin elementit, joiden avulla voit hallita laitteiden 1, 2, 5 suorituskykyä.
Jos laite 1 vuotaa tai jokin laitteen 5 virtalähteistä katkeaa, laitteen 4 etupaneelissa olevat merkkivalot DEVICE TROUBLE 1.5 syttyvät ja äänihälytys aktivoituu.
Säteilytehon pienentyessä laitteen 2 säteilyn ohjausyksikkö muodostaa signaalin, joka tulee laitteeseen 4. Tällöin laitteen 4 etupaneelissa syttyy merkkivalo LAITTEEN VIKA 2 ja äänihälytys aktivoituu.
7. Vastaanottavien kanavien kunnon seuranta johtuu kirkkauden ohjausmerkkien läsnäolosta pyyhkäisyn lopussa RANGES-kytkimen asennossa "300-400 m".
Yhden tai useamman suurtaajuusvahvistimen (UHF) vahvistuksen pienentyessä tai vikaantuessa pääilmaisimen (laite 4) katodisädeputken näytössä ei ole vastaavia ohjausmerkkejä.
8. Kahden MG-7 GAS:n samanaikainen toiminta varmistetaan yhdellä aluksella hydroakustisten antennien etäisyydellä 70-150 m.
GAS MG-7:n samanaikainen käyttö muiden asemien ja järjestelmien kanssa ei ole mahdollista.
9. GAS MG-7:n tärkeimmät taktiset ominaisuudet on esitetty taulukossa. 2.
10. GAS MG-7:n tärkeimmät tekniset ominaisuudet on esitetty taulukossa. 3.
11. Taisteluryhmä GAS MG-7 - ei-standardi. RTS:n henkilökunta, joka on tutkinut sen rakennetta ja läpäissyt kokeet päästäkseen itsenäiseen vahtipitoon asemalla, saa huoltaa ja vahtia GAS MG-7:ää.
taulukko 2
TAKTISET TÄRKEIMMÄT OMINAISUUDET KAASU MG-7
Ominaisuudet Numeerinen
merkitys
PDSS:n keskimääräinen tunnistusalue, m:
Midget Submarine 200
Vedenalaiset ajoneuvot 150
Vedenalainen sabotööri 120
Näkökenttä vaakatasossa, (°) 360
Katsotun pyöreän vyöhykkeen syvyys 20
RMS-määritysvirhe
kohdekoordinaatit:
Etäisyyden mukaan, % asteikko 3
Suuntakulma, ° 3
Resoluutio:
Etäisyyden mukaan m 10
Suuntakulma, ° 15
Laitteen asennuksen työsyvyys 1, m 10
Aika laittaa asema hälytystilaan (min) 25
Jatkuvan toiminnan aika, h 24
Huomautus. PDSS:n keskimääräinen tunnistusalue oikean havaitsemisen todennäköisyydellä 0,9; meritila enintään 3 pistettä; meren syvyys vähintään 20 m; alentunut meluhäiriötaso on enintään 0,02 Pa.
Taulukko 3. KAASUN MG-7 KESKEISET TEKNISET OMINAISUUDET

Ominaisuudet Numeerinen
merkitys
Koetuspulssin kesto, ms 0,5
Anturin pulssin rakenne Suorakulmainen
korkealla taajuudella
täyte
Hydroakustinen suuntausominaisuus
tic-antenni, °:
a) säteilytila:
Vaaka 360
Pysty 3
b) vastaanottotila:
Vaakatasossa 32 XH x 12
Pysty 12
Alue asteikot, m 0-100
Virrankulutus verkkovirrasta 220/380 V 50 Hz (W) 800
Aseman käyttöaika ennen keskimääräistä korjausta, h 5000
Normaalin toiminnan ehdot:
Ympäristön lämpötila, °С 0-40
Suhteellinen kosteus jopa 98
lämpötila 20-25 °С, %
Meren aallot, pisteitä jopa 3
Taistellakseen vihollisen sukellusveneitä vastaan Yhdysvallat loi yhdessä Naton liittolaisten ja Japanin kanssa syvällisen sukellusveneiden vastaisen valvontajärjestelmän Atlantin ja Tyynenmeren valtamerille. Se sisältää erilaisia voimia ja välineitä, mukaan lukien kiinteät, laiva- ja lentoluotaimet. Kaikki ne on suunniteltu havaitsemaan vihollisen sukellusveneet ja antamaan niille kohdemerkinnät. Niiden toiminta perustuu sukellusveneiden pääasiallisen paljastamisominaisuuden - potkurien ja mekanismien melun - käyttöön.
Potkureiden melu havaitaan melko laajalla alueella ja mekanismien - erittäin kapealla, erillisten erillisten taajuuksien muodossa. Melun spektrianalyysi mahdollistaa paitsi vedenalaisen kohteen sijainnin ja sen liikkeen elementtien määrittämisen, myös sen melko tarkasti tunnistamisen ja kansallisuuden. Veneen nopeuden kasvaessa sen osaäänien voimakkuus kasvaa koko taajuusalueella. Säteilymaksimi osuu kuitenkin matalataajuiselle alueelle: vedenalaisten kohteiden säteilytason korkeimmalle intensiteetille ja minimihäviöille niiden leviämisen aikana. Näiden parametrien suhteen analyysi antoi sysäyksen matalataajuusalueella (10-300 Hz) toimivien hydroakustisten asemien kehittämiselle.
Se, että monien maailman maiden laivastot ovat ottaneet käyttöön nykyaikaiset erittäin tehokkaat sukellusveneiden vastaiset aseet, joita ohjataan uusimpaan tietotekniikkaan perustuvilla taistelutietojärjestelmillä, on johtanut siihen, että sukellusveneiden luotainjärjestelmien on toimittava suurimman osan ajasta passiivisessa tilassa. Lisäksi passiiviset asemat voivat havaita kohteen etäisyydeltä, joka ylittää sen aseiden käyttöetäisyyden. Joten oli kiireellinen tarve parantaa passiivisen GAS:n melun suunnan haun tarkkuutta, joka riittää laukaustietojen tuottamiseen, sekä ratkaisemaan kaikuluotaimen varjoalueella sijaitsevan pinta-aluksen tai sukellusveneen perän suuntakulmien kuunteluongelma. Näiden vaatimusten toteuttaminen tuli mahdolliseksi käyttämällä matalataajuisia kaikuluotaimia, joissa on hinattavat antennit hydroakustisissa järjestelmissä.
Sukellusveneiden tunnistusalue riippuu seuraavista passiivisen GAS:n ominaisuuksista: antennin suuntausindeksi (tilaselektiivisyys riippuu siitä); oman häiriön taso; tunnistuskynnys (tunnistusero), joka on määritetty tietylle kohteen havaitsemisen ja väärän hälytyksen tunnistuksen todennäköisyydelle.
Antennin suuntaavuuteen vaikuttavat hydrofonien ominaisuudet, niiden lukumäärä ja suhteellinen sijainti. Tästä syystä matalataajuisella alueella toimivia suuripituisia vastaanottoantenneja käytetään joustavia pidennettyjä hinattavia antenneja (GPBA). Rakenteellisesti GPBA on järjestelmä, joka koostuu toisiinsa yhdistetyistä akustisista moduuleista, jotka sisältävät hydrofoneja ja elektronisia piirejä signaalin esikäsittelyä varten (kuva 2). Hydrofonien herkkyys määräytyy suurelta osin materiaalin mukaan, josta ne on valmistettu. Nykyaikaisissa järjestelmissä käytetään pietsosähköistä keramiikkaa ja pietsopolymeerejä. Antennin hydrofoniosan molemmissa päissä on erityiset tärinää vaimentavat moduulit, joiden avulla voit lisätä merkittävästi hinauksen nopeutta tinkimättä työn laadusta.

Jokainen hydrofoni on kytketty kaapeliköyteen, jonka kautta signaalit välitetään esikäsittelypiirien kautta laivaan, jossa ne käsitellään lopullisesti aluksen laitteissa tai välitetään rannikon tietojenkäsittelykeskukseen.
Graafisesti GPBA:n suuntausominaisuus voidaan esittää kolmiulotteisen renkaan muotoisena kappaleena, johon on kiinnitetty lisäkartioita, jotka muodostuvat suuntausominaisuuden sivukeiloista. Pyöreän litteän antennin kolmiulotteinen suuntaavuus on muodoltaan yksinkertaisempi - projektorisäde, jolla on kiertosymmetria tason normaalin suhteen ja jota ympäröivät sivukeilat (kuva 3),
Vertaamalla GPBA:n ja litteän antennin suuntaavuuden graafisia ja analyyttisiä lausekkeita, voimme päätellä, että pituuden kasvaessa pidennettyjen antennien suuntaominaisuudet paranevat merkittävästi litteisiin antenneihin verrattuna, koska jälkimmäisten ominaisuuksia rajoittaa niiden koko. Jatketun antennin suuntausominaisuuden avaruudellista suuntausta voidaan ohjata joko sen mekaanisella pyörityksellä tai kytkemällä sarjaan tai rinnan akustisen antennin kunkin elementin kanssa vastaavat vaiheistuspiirit, jotka saavat aikaan maksimiherkkyysakselin pyörimisen tiettyyn suuntaan. 80-luvulta lähtien digitaalinen säteenmuodostusmenetelmä on otettu tehokkaasti käyttöön GAS:ssa.
Sukellusveneiden havaitsemisessa GPBA:lla varustetut keinot ovat nousseet erityisen tärkeiksi, sillä satojen metrien antennien käyttö mahdollisti niiden toiminta-alueen siirtämisen matalien ääni- ja infraäänitaajuuksien alueelle. Lisäksi pitkien hinaajien käytön aiheuttama antennin ja kantoaluksen tilan monimuotoisuus vähentää aluksen oman melun vaikutusta luotainen suorituskykyyn.
GPBA:n haittoja ovat kyvyttömyys mitata suoraan etäisyyttä kohteeseen (tätä varten he turvautuvat kolmiomittausmenetelmään). Antennin sijainti avaruudessa suhteessa aluksen runkoon muuttuu jatkuvasti. Se voi poiketa laivan halkaisijatasosta joustavan kaapeliköyden pituuden vuoksi, muuttaa mielivaltaisesti syvyyttä kantajan epätasaisen liikkeen ja veden tiheyden vuoksi, täristä vesiympäristön paikallisten häiriöiden vuoksi, pyöriä oman akselinsa ympäri hinausköyden kiertymisen vuoksi (kuva 4). Tämä vaikuttaa suunnanhaun tarkkuuteen.
Ensimmäisten GPBA-järjestelmämallien luominen aloitettiin Yhdysvalloissa vuonna 1963, ja vuonna 1966 suoritettiin TASS-järjestelmän (Towed Array Sonar System) merikokeet antennilla, jonka pituus on noin 100 m ja halkaisija 7,5 cm. pinta-alukset (TACTASS - Tactical Towed Array Sonar System).
Tehokkaan toiminnan varmistamiseksi passiivisessa tilassa STASS-ohjelma kehitti laajennetun hinattavan TV-16-järjestelmän. Se on tarkoitettu AN / BQQ-5:lle, joka on viime vuosina pysynyt Yhdysvaltain laivaston Los Angeles-luokan sukellusveneiden ja Ohio SSBN:ien pääluotaimen havaitsemisessa. Rakenteellisesti TV-16-antenni on lineaarinen järjestelmä, jonka halkaisija on 82,5 mm ja joka koostuu polymeerikuoreen suljetuista hydrofoneista. Virtauskohinan ja vastuksen vähentämiseksi antenni on suunnattu molemmista päistä.

GAK AN / BQQ-6 on periaatteessa modifioitu versio GAK AN / BQQ-5:stä. Kaaviot antennilaitteiden sijoittamiseksi komplekseihin ovat samanlaisia (pallomainen keula, ilmassa, konformaalinen keula ja GPBA). AN / BQQ-6 SJSC sisältää myös infraäänen suunnanhakuaseman. Aluksi TV-16-antenni kiinnitettiin suoraan sukellusveneiden hinauslaitteeseen. Myöhemmin se asetettiin koteloon, joka kiinnitettiin ulkopuolelta veneen runkoon. Antenni on myös varustettu laitteella, jolla se voidaan irrottaa sukellusveneestä hätätilanteessa. GPBA:ta hinattaessa veneen nopeus laskee noin 0,5 solmua. Hinausvaijerin pituus on AN/BQQ-5:lle 800 m ja AN/BQQ-6:lle 720 m. Antenni asennetaan ja poistetaan hydraulilaitteella, jolla voidaan myös säätää sen pituutta. TV-16-antenni varmistaa passiivisen GAS:n toiminnan taajuusalueella 10 Hz useisiin kilohertseihin ja vedenalaisten kohteiden havaitsemisen 15-90 km säteellä.
Asiantuntijat näkevät tapoja parantaa edelleen GAS:n tehokkuutta sukellusveneiden GPBA:lla siirrettäessä toiminta-alue spektrin ultramatalataajuiselle alueelle (hertsien yksikköä) sukellusveneiden havaitsemiseksi tonaalisilla signaaleilla. Tällaisten signaalien havaitseminen on tarkoitus suorittaa ohuella lineaarisella hinattavalla TV-23-antennilla, jonka pituus on tulevaisuudessa 2000 m. Tällaisten antennien asennus osana AN / BQQ-5D SJSC:tä suoritetaan Yhdysvaltain laivaston monikäyttöisten ydinsukellusveneiden suunnitellussa korjauksessa. Tässä tapauksessa antennit sijoitetaan sukellusveneen pääpainolastin tankkeihin.
Pinta-alusten GPBA:n käytössä on useita ominaisuuksia. Erityisesti niillä on parhaat mahdollisuudet pidennettyjen antennien asettamiseen ja näytteenottoon, ja niiden paino on myös vähemmän rajoitettu, eli antennin pituus voi olla paljon pidempi kuin sukellusveneiden. Ne eivät kuitenkaan pysty nopeasti muuttamaan antennin hinaussyvyyttä. TACTASS-ohjelma on suunniteltu pääasiassa pinta-aluksille, mikä mahdollistaa kaikuluotaimen kehittämisen, joka pystyy ratkaisemaan taktisia tehtäviä jopa useiden kymmenien kilometrien etäisyydellä ja toimimaan keskitaajuusalueella.
TACTASS-ohjelman luoman HAS:n pääominaisuudet on esitetty taulukossa. 1.
Ensimmäinen sarjaasema, joka oli tarkoitettu Yhdysvaltain laivaston pinta-aluksille, oli AN / SQR-15. Se mahdollisti vihollisen sukellusveneiden liikkuvan kaikuluotaimen, mutta yleensä sen ominaisuudet olivat rajalliset. Tällä hetkellä asema on edelleen käytössä Yhdysvaltain laivaston yksittäisillä aluksilla.
Taktinen kaikuluotain AN / SQR-18 on suunniteltu tarjoamaan laivakokoonpanojen ilmatorjuntapuolustusta. Se on edistyneempi kuin AN / SQR-15, sillä on suurempi kantama. Jatketun GAS-antennin asennus ja valinta tehdään GAS AN / SQS-35 antennin nosto- ja laskulaitteella, jonka suojukseen se on kiinnitetty kaapeli-kaapelilla. Hydroakustisten signaalien esivahvistimet sijaitsevat myös GAS AN / SQS-35 -antennin antennissa, tietojenkäsittely- ja näyttölaitteet ovat laivalla. Päivitetyssä AN/SQR-18A luotainasemassa on elektroninen laite, joka eliminoi omasta melustaan johtuvan soihdun, kuljetusaluksen akustisen melun osoitinnäytöstä ja sillä on parempi seurantajärjestelmä.
|
GPBA:N KAASUN PÄÄOMINAISUUDET |
|||
|
Ominaisuudet |
AN/SQR-18A(Y) |
AN/5QR-19 |
AN/UQQ-2 (SURTASS) |
|
Toiminta-alue, Hz |
Keskitaajuudet |
3-3000 |
1-3030 |
|
Havaintoetäisyys, km |
Jopa 550 |
||
|
Suuntaustarkkuus, aste |
3-10 |
||
|
Antennin pituus, m |
1220 |
||
|
Antennin halkaisija, mm |
82,5 |
82,5 |
|
|
Kaapelin pituus, m |
1524 |
1700 |
1830 |
|
Laivavarusteiden massa, kg |
5940 |
5840 |
6030 |
|
Asetus-valintalaitteen paino, kg |
7,61 |
||
|
Hinausnopeus, solmua (syvyys, m) |
(335) |
(365) |
3 (150-450) |
AN/SQR-19 luotain on suunniteltu havaitsemaan ja luokittelemaan sukellusveneitä saattueiden saattamisen ja lentotukialusten kokoonpanojen tukemiseen tähtäävien tehtävien suorittamisen aikana. Asema rekisteröi meriveden lämpötilan, sähkönjohtavuuden meren hydrologiasta riippuen, määrittää antennin upotussyvyyden, joka on optimaalinen kuunteluun. Toimintatilassa antenni hinataan aluksen taakse hyppykerroksen alle vähentämään hinausaluksen aiheuttamia häiriöitä.
Länsimaisten asiantuntijoiden mukaan asema tarjoaa 10 kertaa suuremman havaintoalueen ja 2 kertaa paremman suunnanhakutarkkuuden kuin AN / SQR-18, ja todennäköisyys osua kohteisiin on 2 kertaa suurempi. AN/SQR-19 kaikuluotaimella havaittujen sukellusveneiden määrä Maailman valtameren eri alueilla eri vuodenaikoina on keskimäärin 11 kertaa suurempi kuin AN/SQR-18A kaikuluotaimella havaittujen veneiden määrä. AN / SQR-19:ää käyttävien sukellusveneiden havaintoalue lähentymisvyöhykkeellä saavuttaa 65 km, suotuisissa hydroakustisissa olosuhteissa ja optimaalisilla hinausnopeuksilla - 100 km, kun LAMPS MKZ -helikopterijärjestelmä on mukana - 125 km.
Vihollisen sukellusveneiden pitkän kantaman havaitsemisen tehtävät voidaan ratkaista käyttämällä osana SURTASS-ohjelmaa (Surveillance Towed Array Sonar System) kehitettyjä luotainasemia. Tämä ohjelma alkoi vuonna 1974. Sen piti luoda varhaisvaroitusluotain, joka pystyy määrittämään toisella ja kolmannella lähentymisvyöhykkeellä sijaitsevien sukellusveneiden sijainnin. Prototyypin työstäminen kesti lähes kahdeksan vuotta.
Uusi AN / UQQ-2 kaikuluotain (SURTASS) on tarkoitettu Stalworth-tyyppisille pitkän kantaman kaikuluotainvalvontaaluksille, joissa käytetään pidennettyä 1220 m pitkää hinattavaa antennia, joka voidaan pidentää taaksepäin 1830 kaapelilla kattamaan syvyysalueen 150-450 m. Nopeus 2 t. 1 solmu, matkalentomatka 4000 mailia, miehistö 30-33 henkilöä, joista yhdeksän upseereita). Niistä kolmea käytetään huumeiden salakuljetuksen torjuntaan, yksi on mukana tieteellisessä tutkimuksessa hydroakustiikan alalla, yksi on korjaustyössä, viisi partioi SOSUS-järjestelmän heikon tehokkuuden alueilla lisätäkseen sukellusveneiden havaitsemisen todennäköisyyttä tai niiden koordinaattien selkiyttämistä kolmiomittausmenetelmällä (neljä Atlantin valtamerellä, Little Oceanin laivastotukikohdassa Paarl ja yksi Peekin meritukikohta Paarlissa). Partiointia suoritetaan yleensä 30-60 päivän ajan 3 solmun nopeudella, kun alus voi matkustaa 6450 mailia.
Lisäksi eri osastojen ohjelmissa on mukana kuusi muuta tämäntyyppistä alusta, joista kaikki 16 alusta voidaan tarvittaessa lähettää partioon.
Vuonna 1986 aloitettiin uuden Victories-tyyppisen katamaraanialuksen kehittäminen. Sen kokonaisuppouma on 3396 tonnia, pituus 71,5 m, leveys 28,5 m, syväys 7,6 m, suurin nopeus 16 solmua (3 solmua partiossa), miehistö 32 henkilöä. Sillä on parempi merikelpoisuus partioitaessa avomerellä alhaisella nopeudella kuin Stalworth-tyyppisillä laivoilla. Tällä hetkellä laivastolla on neljä Victories-luokan katamaraania.
TACAN/UQQ-1 (SURTASS) vastaanottaa kohinasignaaleja akustisen spektrin alemmalla taajuudella kuin muut HAS-laitteet, joissa on GPBA. Ulkomaisten lähteiden mukaan se pystyy havaitsemaan sukellusveneitä yli 150 km:n etäisyydeltä ja joissakin tapauksissa noin 550 km:n etäisyydeltä. Luokitusmatka on 140 km. GAS:n suunnanmääritystarkkuus riippuu enemmän elektronisella menetelmällä muodostetusta suuntakäyrästä ja vähemmässä määrin antennin asennon muutoksesta. Laakeritarkkuus on 2-5°.
Kantomelun vaikutuksen vähentäminen SURTASS-järjestelmän GASiin jatkuu, ja tällä hetkellä asemat on varustettu erityisillä suodattimilla, jotka poistavat laivan oman melun kuljettajan näytöltä.
Sukellusveneiden mobiilin ennakkovaroitusjärjestelmän SURTASS-järjestelmän vakava haittapuoli on haavoittuvuus. Uskotaan, että konfliktin sattuessa vihollinen pyrkii ensisijaisesti tuhoamaan kaikuluotaimen tarkkailualukset varmistaakseen sukellusveneidensä turvallisuuden. Siksi ehdotetaan käytettäväksi sukellusveneitä SURTASS-luotaimen kantajana, mikä vähentää merkittävästi järjestelmän haavoittuvuutta ja varmistaa valvonnan salaisuuden rauhan aikana.
SURTASS-järjestelmän GAS:n vastaanottamien tietojen käsittelyn järjestäminen mahdollistaa ensisijaisen käsittelyn aluksella ja myöhemmän yksityiskohtaisen analyysin yhdessä kahdesta rannikon tietojenkäsittelykeskuksesta (Norfolk, Pearl Harbor), jossa ne välitetään satelliittiviestinnän kautta. Tarvittaessa tiedot välitetään suoraan tarkkailualueella oleville ASW-aluksille. Rannikkokeskukset suorittavat tietojen lopullisen käsittelyn, mukaan lukien eri hydroakustisista havaintoaluksista saadun tiedon korreloinnin. Nykyaikaisissa matalataajuisissa hydroakustisissa komplekseissa hydrofonien analogiset signaalit muunnetaan digitaalisiksi adaptiivisella menetelmällä, joka perustuu optimaalisen suodatuksen teoriaan, mikä varmistaa järjestelmien toiminnan suuren joustavuuden ja alhaisen väärien hälytysten tason häiriöolosuhteissa. Tähän käytetyssä laskentalaitteistossa on valmiiksi käyttöön otettu redundanssi ja se on itsesäätyvä.
AN / SQR-19 kaikuluotaimen vastaanottamat hydroakustiset tiedot käsitellään AN / UYS-2-prosessorilla AN / SQQ-89 automatisoidun sukellusveneiden vastaisen aseiden ohjausjärjestelmän rakenteessa, jossa GPBA:lla varustettu kaikuluotain on yhteensopiva aktiivisen sisäänrakennetun kaikuluotaimen AN / SQS-53 kanssa. Prosessori suorittaa antennin suuntaavuuden muodostuksen, laajakaistaprosessoinnin kohteen suhteellisen liikkeen alustavaa havaitsemista ja analysointia varten, saapuvien hydroakustisten signaalien korrelaation sekä LAMPS MKZ -helikopterijärjestelmän datan.
Vuonna 1995 AN / SQO-89 automatisoidut järjestelmät otettiin käyttöön noin 130 pinta-aluksella. Tällä hetkellä tätä järjestelmää päivitetään ohjelmiston ja laitteiston parantamiseksi. Lisäksi lentotukialuksille kehitetään uutta suorituskykyä parantavaa ASW-taistelujärjestelmää.
Erityistä huomiota kiinnitetään prosessorin luomiseen hydroakustisten signaalien monimutkaiseen käsittelyyn. Venekomplekseissa signaaleja käsittelevät lukuisat AN / UYK-43 -tietokoneprosessorit, jotka on jaettu osastoihin ja AN / BSY-1 -kompleksiin. Tarjotaan aktiivisen ja passiivisen GAS:n avulla saatujen tietojen yhdistelmä. 4,5 miljoonaa järjestelmäohjelmistosarjaa on sijoitettu 100 yleiskäyttöiseen ja 50 erikoisprosessoriin. Kaiken kaikkiaan AN / BSY-1 -kompleksin tietokonelaitteet vievät 117 telinettä, sen paino on 32 tonnia. Digitaalisten signaalinkäsittelytyökalujen perustoiminto GPBA-järjestelmissä on nopea Fourier-muunnos.
Asiantuntijoiden mukaan on mahdollista parantaa merkittävästi hydroakustisten aseiden ominaisuuksia ottamalla laajalti käyttöön älykkäitä tietojenkäsittelyalgoritmeja, käyttämällä viimeisimpiä teknologioita tietotekniikan alalla, parantamalla tunnistustyökalujen rakennetta, parantamalla ihmisen ja tietokoneen välisen rajapinnan energiatehokkuutta ja parantamalla operaattorikoulutuksen laatua. Puuttuvien kohteiden todennäköisyyttä pyritään vähentämään siirtämällä osa operaattorin toiminnoista älykkäille algoritmeille, erityisesti neljän tyyppisille algoritmeille:
| VAKIOTYÖKALUT HYDROAKUSTISTEN SIGNAALIEN KÄSITTELYN KAASUSSA GPBA:lla | ||
|
Nimi |
Esitys, miljoonaa operaatiota/s |
Sovellus |
|
AN/SQR-17A |
. | GAS GPBA AN / SQR-18A, helikopterin PLO-järjestelmä LAMPS Mk3 |
|
AN/UYS-1 |
GAS S GPBA (SURTASS), helikopterijärjestelmä LAMPS MkZ | |
|
AN/UYS-2 |
SURTASS-järjestelmä, AN/BSY-2-kompleksi, ACS AN/SQQ-89 | |
| Kompleksit AN/BSY-1 ja AN/BSY-2 | ||
| SURTASS-järjestelmä, AN/BSY-1 ja AN/BSY-2 kompleksit | ||
— Algoritmi HAS-toiminnan tehostamiseksi. Se auttaa käyttäjää havaitsemaan tiedot kohteiden havaitsemisessa ja luokittelussa. Joten suhteellisen korkeilla taajuuksilla toimivassa GAS:ssa kohteen ja GAS:n kantoaallon keskinäisestä liikkeestä johtuva Doppler-siirtymä kaikusignaalin taajuuden ja kaikuhäiriön keskitaajuuden välillä oli 50 Hz tai enemmän, eli se oli kuultavissa. GPBA:lla varustetun HAS:n käyttötuntien pieneneminen johti siihen, että Doppler-siirtymä oli 50 Hz:n sisällä ja muuttui käyttäjälle mahdottomaksi. DEP (Doppier Enhancement Processor), joka toteuttaa algoritmin GAS:n toiminnan tehostamiseksi, eliminoi tämän haitan. Se vaimentaa adaptiivisesti jälkikaiunta, vahvistaa kaikusignaalia ja siirtää sitä suhteessa häiriöön määrällä, joka tarjoaa Doppler-siirtymäarvon, joka ei ylitä käyttäjän herkkyyskynnystä. Tämä vähentää huomattavasti väärien hälytysten todennäköisyyttä.
— Algoritmi toimintatilan automaattista valintaa ja käsittelykanavan määrittämistä varten. Se tarjoaa välittömän arvion "melukentästä", ympäristöolosuhteista ja muista ominaisuuksista, jotka myötävaikuttavat havaintotyökalujen ja toimintatilojen optimaaliseen valintaan. Operaattorille ilmoitetaan ympäristön ja taktisen tilanteen muutoksista.
— Valmiustilan algoritmi. Sen avulla korostetaan kanava, jossa signaali havaitaan, ja generoidaan signaali, joka varoittaa käyttäjää.
— Mukautuvan käsittelyn algoritmi. Koordinoi prosessorin toiminnan havaitun signaalin parametrien kanssa.
Uusien GPBA-tunnistustyökalujen kehittämisen myötä älykkäät algoritmit tarjoavat merkittävää apua ASW-ongelmien ratkaisemisessa.
Taulukossa on esitetty GPBA-järjestelmissä tietojenkäsittelyyn käytettävien standardityökalujen koostumus ja suorituskyky. 2.
Kohteiden suunnanhakutarkkuuden ja suorituskyvyn parantamisen ongelmaa voimakkaiden paikallisten häiriöiden olosuhteissa ei ole ratkaistu. Kun etäisyys kohteeseen kasvaa, virhe kohteen sijainnin havaitsemisessa kasvaa. Esimerkiksi suunnanhakutarkkuudella 1° 50 km:n etäisyydellä mahdollisen kohdepaikan alueen pituus on 1 km. Siksi antennien käyttö yhdessä kantoaaltopohjaisten sukellusveneiden torjuntahelikopterien ja muiden pinta-alusten kanssa aseiden kosketuksen ja käytön selventämiseksi antaa suurimman vaikutuksen.
Merenalainen melunvaimennus aiheuttaa ongelmia uusien kehityshankkeiden ja olemassa olevan GAS:n modernisoinnin saralla, jonka ratkaisu toteutetaan pääosin pienentämällä edelleen passiivisen ja aktiivisen GAS:n toiminta-aluetta, kehittämällä aktiivisen matalataajuisen GAS:n teknologiaa ja uusia valokuituoptiikkaan perustuvia asemia.
Yksi lupaavista GPBA-rahastojen kehittämissuunnista on aktiivi-passiivisten matalataajuisten järjestelmien luominen. Rakenteellisesti ne koostuvat suurikokoisista säteilevistä ja passiivisista hinattavista antenneista. Ulkomaisten lähteiden mukaan tällaisilla järjestelmillä on merkittäviä etuja kohteiden havaitsemisessa ja seurannassa olemassa oleviin (esimerkiksi AN / SQR-19) verrattuna, koska lähetetty signaali voi sisältää erityispiirteitä taajuuden, modulaatiotyypin, kaistanleveyden ja tason suhteen. Tähän on lisättävä, että matalilla taajuuksilla häviöt signaalin etenemisen aikana vesiympäristössä ovat pienimmät. Koska kohinaspektrin erilliset komponentit sijaitsevat pääasiassa matalataajuisella alueella, ääntä vaimentavat pinnoitteet lakkaavat toimimasta.