Llojet e pajisjeve shtrënguese dhe llogaritja e tyre. Tekstet e inxhinierisë mekanike Mekanizmat e kamerës. Llojet e mekanizmave të kamerës. Avantazhet dhe disavantazhet. Qellimi kryesor
AGJENCIA FEDERALE PËR ARSIM TË FEDERATISË RUSE
INSTITUCIONI ARSIMOR SHTETËROR I ARSIMIT TË LARTË PROFESIONAL
"UNIVERSITETI SHTETËROR I NAJTËS DHE GAZIT TYUMEN"
INSTITUTI I TRANSPORTIT
departamenti Pjesë makine
PËRMBLEDHJE E LLOJET KRYESORE TË MEKANIZMAVE
UDHËZIME METODOLOGJIKE
te trajnim praktik Nga Teoritë e mekanizmave dhe makinave për studentët e specialiteteve NR-130503 PST-130501 NB-130504 01, MSO-190207
forma të arsimit me kohë të plotë dhe të pjesshme të plotë dhe të reduktuar
Tyumen 2007
Miratuar nga këshilli redaktues dhe botues
Universiteti Shtetëror i Naftës dhe Gazit Tyumen
Përpiluar nga: Profesor i Asociuar, Ph.D. Zabanov Mikhail Petrovich
profesor, d.t.s. Babichev Dmitry Tikhonovich
asistent, Pankov Dmitry Nikolaevich
© Institucion arsimor shtetëror i arsimit të lartë profesional
"Universiteti Shtetëror i Naftës dhe Gazit Tyumen"
Gjatë mësimit, është e nevojshme të njiheni me grupet dhe llojet kryesore të mekanizmave, imazhet e tyre grafike. Mësoni të përfaqësoni një mekanizëm real në formën e një diagrami.
Raporti duhet të përshkruajë dhe përshkruajë llojet klasike të mekanizmave.
Inxhinieria mekanike është dega kryesore e teknologjisë moderne. Progresi i inxhinierisë mekanike përcaktohet nga krijimi i makinerive të reja me performancë të lartë dhe të besueshme. Zgjidhja e këtij problemi më të rëndësishëm bazohet në përdorimin kompleks të rezultateve të shumë disiplinave shkencore dhe, para së gjithash, në teorinë e mekanizmave dhe makinave.
Me zhvillimin e makinave, përmbajtja e termit "makinë" ka ndryshuar. Për makinat moderne, ne japim përkufizimin e mëposhtëm: Një makinë është një pajisje e krijuar nga një person për konvertimin e energjisë, materialeve dhe informacionit në mënyrë që të lehtësojë punën fizike dhe mendore, të rrisë produktivitetin e saj dhe të zëvendësojë pjesërisht ose plotësisht një person në punën e tij dhe funksionet fiziologjike.
Sipas funksioneve të kryera nga makinat, ato ndahen në klasat e mëposhtme:
1) Makinat e energjisë
2) Mjete transporti
3) Makinat teknologjike
4) Makinat e kontrollit dhe kontrollit
5) Makinat logjike
6) Makinat kibernetike
Përkufizimi i termit "mekanizëm" është ndryshuar vazhdimisht pasi janë shfaqur mekanizma të rinj.
Një mekanizëm është një sistem trupash i krijuar për të kthyer lëvizjen e një ose më shumë trupave të ngurtë në lëvizjet e nevojshme të trupave të tjerë. Nëse përveç trupave të ngurtë, në transformimin e lëvizjes përfshihen edhe trupa të lëngët ose të gaztë, atëherë mekanizmi quhet përkatësisht hidraulik ose pneumatik. Për sa i përket funksionalitetit, mekanizmat ndahen në llojet e mëposhtme:
1) Mekanizmat e motorëve dhe konvertuesve
2) Ingranazhet
3) Aktivizuesit
4) Mekanizmat e menaxhimit, kontrollit dhe rregullimit
5) Mekanizmat për ushqimin, transportin dhe klasifikimin e produkteve dhe objekteve të përpunuara
6) Mekanizmat për numërimin automatik, peshimin dhe paketimin e produkteve të gatshme
Karakteristika kryesore e mekanizmit është transformimi i lëvizjes mekanike. Mekanizmi është pjesë e shumë makinave, pasi transformimi i energjisë, materialeve dhe informacionit zakonisht kërkon transformimin e lëvizjes së marrë nga motori. Është e pamundur të barazohen konceptet "makinë" dhe "mekanizëm". Së pari, përveç mekanizmave në makinë, ka gjithmonë pajisje shtesë që lidhen me kontrollin e mekanizmave. Së dyti, ka makina në të cilat nuk ka mekanizma. Për shembull, vitet e fundit janë krijuar makina teknologjike në të cilat çdo organ ekzekutiv drejtohet nga një motor elektrik ose hidraulik individual.
Gjatë përshkrimit të mekanizmave, ato u ndanë në grupe të veçanta në bazë të modelit të tyre (levë, kamera, fërkim, ingranazh, etj.)
Mekanizmat formohen nga bashkëngjitjet e njëpasnjëshme të lidhjeve në mekanizmin fillestar.
LINK - një ose më shumë pjesë të lidhura fiksisht me njëra-tjetrën, të përfshira në mekanizëm dhe që lëvizin si një.
INPUT LINK - një lidhje në të cilën raportohet lëvizja, e cila konvertohet nga mekanizmi në lëvizjet e kërkuara të lidhjeve të tjera. Lidhja e hyrjes lidhet me motorin ose me lidhjen e daljes së një mekanizmi tjetër.
OUTPUT LINK - një lidhje që bën një lëvizje për të cilën është menduar mekanizmi. Lidhja e daljes lidhet me pajisjen aktivizuese (trupi i punës, treguesi i instrumentit) ose me lidhjen hyrëse të një mekanizmi tjetër.
Lidhjet lidhen me njëra-tjetrën në mënyrë të lëvizshme me anë të çifteve kinematike: rrotulluese (mentesha) dhe përkthimore (rrëshqitës).
TRAJEKTORIA pikë(lidhja) - vija e lëvizjes së pikës në aeroplan. Mund të jetë një vijë e drejtë ose një kurbë.
LIDHJE
Mekanizmat e levave janë mekanizma që përfshijnë lidhje të ngurtë të ndërlidhura nga çifte kinematike rrotulluese dhe përkthimore. Mekanizmi më i thjeshtë i levës është mekanizëm me dy lidhje, i përbërë nga një raft lidhjesh fikse 2 (Fig.1.1 ) dhe një levë të lëvizshme 1 , e cila ka aftësinë të rrotullohet rreth një boshti fiks (zakonisht ky është mekanizmi fillestar).
Fig.1.1 Lidhje me dy lidhje
TE mekanizmat me levë me dy lidhje përfshijnë mekanizmat e shumë makinave rrotulluese: motorët elektrikë, turbinat me tehe dhe ventilatorët. Mekanizmat e të gjitha këtyre makinave përbëhen nga një raft dhe një lidhje (rotori) që rrotullohet në kushineta fikse.
Mekanizmat më komplekse të levës janë mekanizma të përbërë nga katër lidhje, të ashtuquajturat mekanizmat me katër lidhje.
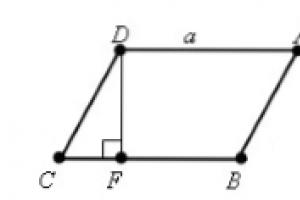
Aktiv Fig.1.2 tregon mekanizmin e një lidhjeje me katër varëse, e përbërë nga tre lidhje të lëvizshme 1, 2, 3 dhe një lidhje fikse 4. Lidhje 1 i lidhur me raft, mund të bëjë një kthesë të plotë dhe quhet maniak. Një katër-lidhje e tillë e artikuluar, e cila ka një maniak dhe një rrotullues në përbërjen e saj, quhet mekanizëm me maniak-roker, ku lëvizja rrotulluese e manivelit me anë të shufrës lidhëse shndërrohet në lëvizje lëkundëse të lëkundësit. Nëse fiksimi dhe shufra lidhëse shtrihen në një rresht, atëherë krahu i lëkundës do të marrë pozicionin e djathtë ekstrem, dhe kur të mbivendosen mbi njëri-tjetrin, ai do të marrë pozicionin e majtë.

Oriz. 1.2 Mekanizëm i varur me katër lidhje
Një shembull i një mekanizmi të tillë është mekanizmi i treguar në Fig.1.3 , ku eshte lidhja 1 – maniak (lidhje hyrëse), lidhje 2 - shufra lidhëse, lidhje 3 - lëkundëse. Pika M S që lëviz përgjatë një kurbë përshkruan një trajektore. Disa trajektore mund të riprodhohen me mekanizma levë teorikisht saktësisht, të tjerët - afërsisht, me një shkallë saktësie të mjaftueshme për praktikë.
Mekanizmi në shqyrtim, i quajtur mekanizmi simetrik Chebyshev, përdoret shpesh si një mekanizëm udhëzues rrethor, në të cilin AB = BC = BM = 1. Me marrëdhëniet e treguara

Oriz. 1.3 Mekanizëm crank-rocker
pika M shufra lidhëse AB përshkruan një trajektore simetrike rreth boshtit n - fq . Këndi i prirjes së boshtit të simetrisë ndaj vijës së qendrave CO përcaktohet nga: РМСО = π - Ω / 2. Pjesë e trajektores së pikës M është një hark rrethi me rreze O 1 M, i cili mund të përdoret në mekanizmat me ndalimin e lidhjes dalëse.
Një shembull tjetër i një lidhjeje me katër lidhje është një i përhapur në teknologji mekanizëm rrëshqitës-manivar (Oriz. 1.4 ).

Oriz. 1.4 Mekanizëm rrëshqitës me manivë
Në këtë mekanizëm, në vend të një krahu lëkundës, është instaluar një rrëshqitës, duke lëvizur në një udhëzues fiks. Ky mekanizëm i fiksimit përdoret në motorët reciprok, pompat, kompresorët, etj. Nëse ekscentriciteti eështë e barabartë me zero, atëherë marrim një mekanizëm qendror rrëshqitës me manivalë ose një boshtor. Në e Mekanizmi i rrëshqitësit jo-zero quhet jo qendror ose deaksial. Këtu, rrotullimi i fiksimit OA përmes shufrës lidhëse AB shndërrohet në një lëvizje reciproke të rrëshqitësit. Pozicionet e natyrshme ekstreme të rrëshqitësit , do të jetë kur fiksimi dhe shufra lidhëse janë në një vijë.
Nëse në mekanizmin e konsideruar zëvendësojmë udhëzuesin fiks me një të lëvizshëm, i cili quhet prapaskenë, atëherë marrim mekanizëm lëkundës me katër lidhje me gur rocker. Një shembull i një mekanizmi të tillë është mekanizmi rrotullues i një planeri ( Fig.1.5 ). Manovra 1 , duke u rrotulluar rreth boshtit, përmes rrotulluesit 2 bën prapaskenë 3 bëni një lëvizje lëkundëse. Në këtë rast, guri lëkundës lëviz mbrapa dhe mbrapa në lidhje me lëkundësin.

Oriz. 1.5 Mekanizëm rrotullues me katër lidhje
Pozicionet ekstreme të prapaskenës do të jenë me fiksimin pingul me të. Është e lehtë të ndërtosh pozicione të tilla: vizatohet një rreth me një rreze të barabartë me gjatësinë e manivelit (trajektorja e pikës A), dhe tangjentet janë tërhequr nga boshti i rrotullimit të prapaskenës.
Kështu, lidhjet mund të bëjnë progresive , rrotulluese ose e komplikuar lëvizjes.
1. Mekanizëm rrëshqitës me manivë.
a) qendrore (Fig. 1);
b) jashtë boshtit (deoksi) (Fig. 2);
e - ekscentricitet
Oriz. 2
1-maniak, sepse lidhja bën një revolucion të plotë rreth boshtit të saj;
2-shkopi, jo i lidhur me raftin, bën një lëvizje të sheshtë;
3-rrëshqitës (pistoni), kryen lëvizje përkthimore;
1 - maniak;
2 - guri i prapaskenës (mëngë), së bashku me yllin 1, bën një rrotullim të plotë rreth A (w1 dhe w2 janë të njëjta), dhe gjithashtu lëviz përgjatë yllit 3, duke e bërë atë të rrotullohet;
3 - rocker (skena).
4.Cilindër hidraulik
(kinematikisht i ngjashëm me mekanizmin lëkundës).
Gjatë procesit të projektimit, projektuesi zgjidh dy probleme:
· analiza(eksploron gati mekanizëm);
· sintezë(po projektohet një mekanizëm i ri sipas parametrave të kërkuar);
Analiza strukturore e mekanizmit.
Koncepte për çiftet kinematike dhe klasifikimi i tyre.
Dy lidhje të ndërlidhura fiksisht formojnë një çift kinematik. Të gjitha çiftet kinematike i nënshtrohen dy klasifikimeve të pavarura:
1. Çiftet janë më të larta ose më të ulëta:
a. Çiftet më të larta janë çifte në të cilat bëhet kontakti përgjatë vijës.
b. Çiftet e poshtme janë çifte në të cilat bëhet kontakt përgjatë sipërfaqes.
2. Të gjitha çiftet ndahen në pesë klasa, në varësi të numrit të lidhjeve të vendosura në lëvizshmërinë e secilës prej lidhjeve. Numri i shkallëve të lirisë tregohet nga . Numri i lidhjeve të imponuara shënohet me . Në këtë rast, numri i shkallëve të lëvizshmërisë mund të përcaktohet me formulën: .
a. Çifti i klasës së parë: ; .
b. Çifti i klasës së dytë: ; .
c. Çifti i klasës së tretë: ; .
d. Çifti i klasës së katërt: ; .
e. Çifti i klasës së pestë: ; .
Shembuj të klasifikimit të çifteve:
Konsideroni çiftin kinematik "vidhos-arrë". Numri i shkallëve të lëvizshmërisë së këtij çifti është 1, dhe numri i lidhjeve të imponuara është 5. Ky çift do të jetë një palë e klasës së pestë, mund të zgjidhet lirisht vetëm një lloj lëvizjeje për një vidë ose arrë, dhe lëvizja e dytë do të jetë shoqëruese.
Zinxhiri kinematik– lidhje të ndërlidhura nga çifte kinematike të klasave të ndryshme.
Zinxhirët kinematikë janë hapësinorë dhe të sheshtë.
Zinxhirët kinematikë hapësinorë- zinxhirë, hallkat e të cilëve lëvizin në plane të ndryshme.
Zinxhirë të sheshtë kinematik- zinxhirë, hallkat e të cilëve lëvizin në një plan ose paralel.
Konceptet për shkallën e lëvizshmërisë së zinxhirëve dhe mekanizmave kinematikë.
Numri i lidhjeve që lundrojnë lirisht në hapësirë shënohet si . Për lidhjet, shkalla e lëvizshmërisë mund të përcaktohet me formulën: . Ne formojmë një zinxhir kinematik nga këto lidhje, duke i lidhur lidhjet me njëra-tjetrën në çifte të klasave të ndryshme. Numri i çifteve të klasave të ndryshme shënohet me , ku është klasa, domethënë: është numri i çifteve të klasës së parë, e cila ka , dhe ; - numri i çifteve të klasës së dytë, që ka , dhe ; - numri i çifteve të klasës së tretë, që ka , dhe ; - numri i çifteve të klasës së katërt, që ka , dhe ; - numri i çifteve të klasës së pestë, për të cilat , dhe . Shkalla e lëvizshmërisë së vargut kinematik të formuar mund të përcaktohet me formulën: .
Ne formojmë një mekanizëm nga zinxhiri kinematik. Një nga tiparet kryesore të mekanizmit është prania e një rafti (rasti, baza), rreth të cilit lidhjet e mbetura lëvizin nën veprimin e lidhjes kryesore (lidhjet).
Shkalla e lëvizshmërisë së mekanizmit zakonisht shënohet si. Ne e kthejmë një nga lidhjet e zinxhirit kinematik në një raft, domethënë heqim të gjashtë shkallët e lëvizshmërisë prej tij, pastaj: - formula Somov-Malyshev.
Në një sistem të sheshtë, numri maksimal i shkallëve të lirisë është dy. Prandaj, shkalla e lëvizshmërisë së një zinxhiri të sheshtë kinetik mund të përcaktohet me formulën e mëposhtme: . Shkalla e lëvizshmërisë së një mekanizmi të sheshtë përcaktohet nga formula Chebyshev: , ku është numri i lidhjeve lëvizëse. Duke përdorur përkufizimin e çifteve kinematike më të larta dhe më të ulëta, formula Chebyshev mund të shkruhet si më poshtë: .
Një shembull i përcaktimit të shkallës së lëvizshmërisë:
Klasifikimi i mekanizmave
Numri i llojeve dhe llojeve të mekanizmave është në mijëra, kështu që klasifikimi i tyre është i nevojshëm për të zgjedhur një ose një tjetër mekanizëm nga një numër i madh i atyre ekzistuese, si dhe për të sintetizuar mekanizmin.
Nuk ka asnjë klasifikim universal, por 3 lloje të klasifikimit janë më të zakonshmet:
1) funksionale. Sipas parimit të procesit teknologjik, mekanizmat ndahen në mekanizma: vënia në lëvizje e mjetit prerës; furnizimi me energji elektrike, ngarkimi, heqja e pjesëve; transporti etj.;
2) strukturore dhe konstruktive. Ai parashikon ndarjen e mekanizmave si nga tiparet e projektimit ashtu edhe nga parimet strukturore. Ky lloj përfshin mekanizmat: crank-slider; karrige lëkundëse; me dhëmbëz levë; kamer-levë etj.;
3) strukturore. E thjeshtë, racionale, e lidhur ngushtë me formimin e një mekanizmi, strukturën e tij, metodat e analizës kinematike dhe të forcës, u propozua nga L.V. Assur në 1916 dhe bazohet në parimin e ndërtimit të një mekanizmi duke shtresuar (bashkuar) zinxhirët kinematikë (në formën e grupeve strukturore) në mekanizmin fillestar. Sipas këtij klasifikimi, çdo mekanizëm mund të merret nga një më i thjeshtë duke i bashkangjitur këtij të fundit zinxhirë kinematikë me numrin e shkallëve të lirisë. W= 0, të cilat quhen grupe strukturore, ose grupe Assur.
Ministria e Transportit e Federatës Ruse
Agjencia Federale e Transportit Detar dhe Lumor
Dega e Krimesë
FGBOU VPO
"Universiteti Shtetëror Detar me emrin Admiral F.F. Ushakov"
Departamenti "Disiplinat themelore"
Teoria e mekanizmave dhe makinerive
projekt kursi
Lidhje e sheshtë
Shënim shpjegues
Projekti u zhvillua nga: Art. gr. _
_____________________________
Drejtuesi i projektit: prof. Burov V.S.
Sevastopol 2012
1. Analiza kinematike e një lidhjeje planare ................................................................................ 3
1.1. Ndërtimi i lëvizjes në 12 pozicione................................................................................................ 3
1.2. Ndërtimi i planeve për shpejtësi të menjëhershme................................................................................................. 4
1.3. Planet e ndërtimit për përshpejtimet e menjëhershme................................................................................................. 5
1.4. Ndërtimi i një diagrami zhvendosjeje................................................................................................................. 8
1.5. Hartimi i një diagrami të shpejtësisë................................................................................................................ 9
1.6. Ndërtimi i një diagrami të nxitimit................................................................................................ 9
2. Analiza e forcës së një lidhjeje të sheshtë ................................................................................................ 10
2.1. Përcaktimi i ngarkesave që veprojnë në lidhjet e mekanizmit................................................................ 10
2.2. Llogaritja e forcës së një grupi lidhjesh 7, 6 .......................................................................................................... 12
2.3. Llogaritja e forcës së një grupi lidhjesh 4, 5 .......................................................................................................... 13
2.4. Llogaritja e forcës së një grupi lidhjesh 2, 3 .......................................................................................................... 14
2.5. Llogaritja e forcës së lidhjes kryesore................................................................................................................ 15
2.6. Llogaritja e forcës së lidhjes kryesore me metodën e Zhukovsky ................................................................ 15
3. Sinteza e mekanizmit të ingranazhit................................................................................................................ 16
3.1. Përcaktimi i parametrave gjeometrikë të mekanizmit të ingranazhit................................................. 16
3.2. Ndërtimi i një plani të shpejtësive lineare................................................................................................. 19
3.3. Ndërtimi i një plani të shpejtësive këndore................................................................................................. 20
4. Sinteza e mekanizmit të kamerës ................................................................................................... 21
4.1. Hartimi i analogëve të përshpejtimeve................................................................................................ 21
4.2. Paraqitja e shpejtësive analoge................................................................................................ 22
4.3. Komplotimi i analogëve të zhvendosjes ................................................................................................ 22
4.4. Gjetja e rrezes minimale fillestare të kamerës................................................................ 22
4.5. Ndërtimi i një profili të kamerës...................................................................................................... 23
Referencat ................................................................................................................... 24
1. Analiza kinematike e një mekanizmi me levë të sheshtë.

E dhënë:
Skema e një mekanizmi të levës së sheshtë.
Parametrat gjeometrikë të mekanizmit:
l OA \u003d 125 mm;
l AB \u003d 325 mm;
l AC \u003d 150 mm;
Është e nevojshme të ndërtohet një mekanizëm në 12 pozicione, plane për shpejtësi të menjëhershme për secilën nga këto pozicione, plane për nxitime të menjëhershme për çdo 2 pozicione, si dhe diagrame të zhvendosjeve, shpejtësive dhe nxitimeve.
1.1 Ndërtimi i 12 pozicioneve të një mekanizmi me levë të sheshtë.
Vizatoni një rreth me rreze OA. Atëherë faktori i shkallës do të jetë:

Ne zgjedhim pozicionin fillestar të mekanizmit dhe nga kjo pikë ndajmë rrethin në 12 pjesë të barabarta. Ne lidhim qendrën e rrethit (pikën O) me pikat e marra. Këto do të jenë 12 pozicionet e lidhjes së parë.
Nëpër t. O vizatojmë një vijë të drejtë horizontale X-X. Pastaj ndërtojmë rrathë me rreze AB me qendra në pikat e marra më parë. Pikat B 0, B 1, B 2, ..., B 12 (prerja e rrathëve me drejtëzën X-X) i lidhim me pikat 0, 1, 2, ..., 12. Marrim 12 pozicione të lidhjes së dytë.
Nga t. O shtyjmë lart segmentin b. Marrim pikën O 1 . Prej tij me një rreze prej O 1 D nxjerrim një rreth.
Në segmentet AB 0, AB 1, AB 2, ..., AB 12 nga pika A, vendosim një distancë të barabartë me AC. Marrim pikë С 0 , С 1 , С 2 , …, С 12 . Nëpërmjet tyre vizatojmë harqe me rreze DC derisa të kryqëzohen me një rreth me qendër në pikën O 1 . Ne lidhim pikat C 0, C 1, C 2, ..., C 12 me ato të marra. Këto do të jenë 12 pozicione të lidhjes së tretë.
Pikat D 0, D 1, D 2, ..., D 12 janë të lidhura me t. O 1. Marrim 12 pozicione të lidhjes së katërt.
Nga pika më e lartë e rrethit me qendër në pikën O1, ne vendosim një segment horizontal të barabartë me a. Nëpër fundin e saj vizatojmë një vijë vertikale Y-Y. Më tej, nga pikat D 0 , D 1 , D 2 , ..., D 12 ndërtojmë harqe me rreze DE deri në kryqëzimin me vijën e drejtë që rezulton. Këto pika i lidhim me ato të sapomarra. Këto do të jenë 12 pozicione të lidhjes së pestë.
Duke marrë parasysh faktorin e shkallës, dimensionet e lidhjeve do të jenë:
AB \u003d l AB * \u003d 325 * 0,005 \u003d 1,625 m;
AC \u003d l AC * \u003d 150 * 0,005 \u003d 0,75 m;
CD= l CD * =220*0,005=1,1 m;
Rreth 1 D \u003d l O1 D * \u003d 150 * 0,005 \u003d 0,75 m;
DE \u003d l DE * \u003d 200 * 0,005 \u003d 1 m;
a 1 \u003d a * \u003d 200 * 0,005 \u003d 1 m;
b 1 \u003d b * \u003d 200 * 0,005 \u003d 1 m.
1.2 Ndërtimi i planeve për shpejtësi të çastit.
Ekzistojnë metoda të ndryshme për ndërtimin e një plani shpejtësie për një mekanizëm, më e zakonshme prej të cilave është metoda e ekuacioneve vektoriale.
Shpejtësitë e pikave O dhe O 1 janë të barabarta me zero, prandaj, në planin e shpejtësisë, ato përkojnë me polin e planit të shpejtësisë p.
Pozicioni 0:


Por shpejtësia e t.B përkoi me polin p, prandaj V B = 0, që do të thotë se shpejtësitë e të gjitha pikave të tjera gjithashtu do të përkojnë me polin dhe do të jenë të barabarta me zero.
Planet e shpejtësive të menjëhershme janë ndërtuar në mënyrë të ngjashme për pozicionet 3, 6, 9, 12.
Pozicioni 1:
Shpejtësia t.A merret nga ekuacioni:

Vija e veprimit të vektorit të shpejtësisë m.A është pingul me lidhjen OA, dhe vetë drejtohet në drejtim të rrotullimit të lidhjes.
Në planin e shpejtësive të menjëhershme, ndërtojmë një segment (pa) ┴ OA, gjatësia e tij (pa) = 45 mm. Atëherë faktori i shkallës është:

Shpejtësia t.V merret nga ekuacionet:
 , ku V BA ┴ VA, dhe V BB0 ║X-X
, ku V BA ┴ VA, dhe V BB0 ║X-X
Nga t.a në planin e shpejtësisë ndërtojmë një vijë të drejtë ┴ në lidhjen BC, dhe nga t.r vizatojmë një vijë të drejtë horizontale. Në kryqëzim marrim pikën b. Lidhim t.a dhe t.b. Ky do të jetë vektori i shpejtësisë t.B (V B).
VB = pb* = 0,04*15,3 = 0,612
Shpejtësia e t.C përcaktohet duke përdorur teoremën e ngjashmërisë dhe rregullin për leximin e shkronjave. Rregulli për leximin e shkronjave është se rendi i shkrimit të shkronjave në planin e shpejtësive ose nxitimeve të një lidhjeje të ngurtë duhet të përputhet saktësisht me rendin e shkrimit të shkronjave në vetë lidhjen.
Nga proporcioni:
Ju mund të përcaktoni gjatësinë e segmentit ac:

Lëmë mënjanë një segment të barabartë me 19,2 mm nga t.a, marrim t.s, e lidhim me shtyllën, marrim vektorin e shpejtësisë t.C (V C).
Shpejtësia t.D përcaktohet duke zgjidhur një sistem ekuacionesh gjeometrike:
 , ku V DC ┴ DC, dhe V DO 1 ┴ DO 1
, ku V DC ┴ DC, dhe V DO 1 ┴ DO 1
Nga t.c në planin e shpejtësisë ndërtojmë një vijë të drejtë ┴ në lidhjen DC, dhe nga t.r vizatojmë një vijë të drejtë ┴ DO 1. Në kryqëzim marrim pikën d. Lidhim t.d me polin, marrim vektorin e shpejtësisë t.D (V D).
V D \u003d pd * \u003d 0,04 * 37,4 \u003d 1,496
Ne gjejmë gjithashtu shpejtësinë, pra nga zgjidhja e sistemit të ekuacioneve:
 , ku V ED ┴ ED, dhe V EE 0 ║Y-Y
, ku V ED ┴ ED, dhe V EE 0 ║Y-Y
Nga t.d në planin e shpejtësisë ndërtojmë një vijë të drejtë ┴ në lidhjen DE, dhe nga t.r vizatojmë një vijë vertikale. Në kryqëzim marrim d.m.th. Lidhim t.a dhe t.b. Ky do të jetë vektori i shpejtësisë t.B (V B).
V E \u003d pe * \u003d 0,04 * 34,7 \u003d 1,388
Në mënyrë të ngjashme, planet për shpejtësi të menjëhershme janë ndërtuar për 2, 3, 4, 5, 7, 8, 10, 11 pozicionet e mekanizmit.
1.3 Ndërtimi i planeve të nxitimit të menjëhershëm.
Përshpejtimet e pikave O dhe O 1 janë të barabarta me zero, prandaj, në planin e nxitimit, ato do të përkojnë me polin e planit të nxitimit π.
Pozicioni 0:
Nxitimi i pikës A gjendet:

Në planin e nxitimeve të çastit ndërtojmë një segment πα ║ ОА, gjatësia e tij (πα)=70 mm. Atëherë faktori i shkallës është:


Drejtimi i nxitimit t.B dhe t.A ║ drejt X-X, ┴ BA, pra nxitimi t.B do të përkojë me fundin e vektorit të nxitimit të menjëhershëm t.A, që do të thotë se nxitimet e të gjitha pikave të tjera të mekanizmit do të përkojnë me të.
Deklarata 7:
Nxitimi i pikës A gjendet:
Në planin e nxitimeve të çastit ndërtojmë një segment πα ║ ОА, gjatësia e tij (πα)=70 mm.
Nxitimi i pikës B mund të gjendet duke zgjidhur ekuacionin e vektorit:


Nga t.a vendosim një segment të barabartë me 21 mm ║ AB, pastaj nga fundi i vektorit që rezulton ndërtojmë një segment ┴ AB dhe vizatojmë një vijë horizontale nëpër shtyllë. Duke lidhur ankthin e kryqëzimit me shtyllën, marrim vektorin e nxitimit t.V.
Ne gjejmë nxitimin t.C duke përdorur teoremën e ngjashmërisë dhe rregullin për leximin e shkronjave:
Prandaj
Nxitimi i pikës D mund të gjendet duke zgjidhur një sistem ekuacionesh vektoriale:



Nga t.s lëmë mënjanë një segment të barabartë me 14,5 mm ║ DC, pastaj nga fundi i vektorit që rezulton ndërtojmë një segment ┴ DC.


Nga pika π ndërtojmë një segment të barabartë me 1,75 mm ║ O 1 D, pastaj vizatoni një vijë të drejtë ┴ O 1 D në fund të vektorit që rezulton.
Nxitimi i pikës E mund të gjendet duke zgjidhur një sistem ekuacionesh vektoriale:
![]()

Drejtimi i nxitimit të pikës E ║ ED, pra vizatojmë një vijë të drejtë horizontale nëpër poli, dhe nga fundi i dytë i vektorit të nxitimit t.D ndërtojmë një segment të barabartë me 1,4 mm ║ ED, pastaj vizatojmë një vijë të drejtë ┴ ED nga fundi i vektorit që rezulton. Duke lidhur pikën e kryqëzimit të drejtëzës ║ ED dhe drejtëzës ┴ ED me polin, marrim vektorin e nxitimit të pikës E.
1.4 Ndërtimi i diagramit të zhvendosjes së lidhjes dalëse.
Diagrami i zhvendosjes së lidhjes së daljes është marrë si rezultat i ndërtimit të segmenteve që janë marrë nga vizatimi i një mekanizmi të levës së sheshtë në 12 pozicione, duke marrë parasysh faktorin e shkallës.

1.5 Ndërtimi i diagramit të shpejtësisë së lidhjes dalëse.
Diagrami i shpejtësisë së lidhjes dalëse merret si rezultat i diferencimit grafik me metodën inkrementale të diagramit të zhvendosjes së lidhjes dalëse. Kjo metodë është në thelb metoda e akordit. Nëse distanca konstante e polit H merret e barabartë me vlerën e intervalit Δt, atëherë nuk ka nevojë të përçohen rrezet nëpër polin П, pasi në këtë rast segmentet h i janë rritje të funksionit S(t) në intervalin Δt.
Kjo do të thotë, një segment vertikal ndërtohet në diagramin e zhvendosjes nga ndarja e parë deri në kryqëzimin me grafikun. Pastaj, një segment horizontal hiqet nga pika e kryqëzimit derisa të kryqëzohet me ndarjen tjetër. Pastaj, nga pika e marrë, një segment vertikal është hequr përsëri derisa të kryqëzohet me grafikun. Kjo përsëritet deri në fund të orarit. Segmentet që rezultojnë janë ndërtuar në diagramin e shpejtësisë, duke marrë parasysh faktorin e shkallës, por jo nga ndarja e parë, por gjysma e ndarjes më herët:

1.6 Ndërtimi i diagramit të nxitimit të lidhjes dalëse.
Është ndërtuar në mënyrë të ngjashme me diagramin e shpejtësisë së lidhjes së daljes së mekanizmit

2. Analiza e forcës së një mekanizmi me levë të sheshtë.
E dhënë:
l OA = 125 mm;
l AB = 325 mm;
l AC = 150 mm;
l CD = 220 mm;
l O1 D = 150 mm;
l DE = 200 mm;
Fmax = 6,3 kN;
m K = 25 kg/m;
Diagrami i forcave të dobishme të rezistencës.
Është e nevojshme të përcaktohen reaksionet në çifte kinematike dhe momenti i balancimit në boshtin e hyrjes së mekanizmit.
2.1 Përcaktimi i ngarkesave që veprojnë në hallkat e mekanizmit.
Le të llogarisim forcën e gravitetit. Rezultantët e këtyre forcave janë të vendosura në qendrat e masës së lidhjeve, dhe madhësitë janë të barabarta:
G 1 \u003d m 1 * g \u003d m K * l OA * g \u003d 25 * 0,125 * 10 \u003d 31,25 H
G 2 \u003d m 2 * g \u003d m K * l B A * g \u003d 25 * 0,325 * 10 \u003d 81,25 H
G 3 \u003d m V * g \u003d 20 * 10 \u003d 200 N
G 4 \u003d m 4 * g \u003d m K * l CD * g \u003d 25 * 0,22 * 10 \u003d 55 H
G 5 \u003d m 5 * g \u003d m K * l O 1D * g \u003d 25 * 0,15 * 10 \u003d 37,5 H
G 6 \u003d m 6 * g \u003d m K * l DE * g \u003d 25 * 0,2 * 10 \u003d 50 H
G 7 \u003d m 7 * g \u003d 15 * 10 \u003d 150 H
Le të gjejmë forcën e rezistencës së dobishme sipas diagramit të forcave të rezistencës së dobishme. Për pozicionin e konsideruar të mekanizmit, kjo forcë është e barabartë me zero.
Nuk ka të dhëna për llogaritjen e forcave të rezistencës së dëmshme, kështu që ne nuk i marrim parasysh.
Për të përcaktuar ngarkesat inerciale, kërkohen përshpejtime të lidhjeve dhe disa pika, kështu që ne do të përdorim planin e nxitimit për pozicionin e konsideruar të mekanizmit.
Le të përcaktojmë forcat e inercisë së lidhjeve. Lidhja kryesore, si rregull, është e ekuilibruar, domethënë qendra e saj e masës shtrihet në boshtin e rrotullimit, dhe rezultanti i forcave inerciale është zero. Për të përcaktuar forcat e inercisë së lidhjeve të tjera të mekanizmit, së pari përcaktojmë nxitimet e qendrave të tyre të masës:
dhe S2 \u003d * πS 2 \u003d 0,4 * 58,5 \u003d 23,4 m / s 2
dhe B \u003d * πb \u003d 0,4 * 64,9 \u003d 25,96 m / s 2
dhe S4 \u003d * πS 4 \u003d 0,4 * 65,7 \u003d 26,28 m / s 2
dhe D \u003d * πd \u003d 0,4 * 78,8 \u003d 31,52 m / s 2
dhe S6 \u003d * πS 6 \u003d 0,4 * 76,1 \u003d 30,44 m / s 2
dhe E \u003d * πe \u003d 0,4 * 74,5 \u003d 29,8 m / s 2
Tani le të përcaktojmë forcat e inercisë:
F I2 \u003d m 2 * a S2 \u003d 8,125 * 23,4 \u003d 190 H
F I3 \u003d m 3 * a B \u003d 20 * 25,96 \u003d 519 H
F I4 \u003d m 4 * a S4 \u003d 5,5 * 26,28 \u003d 145 H
F I6 \u003d m 6 * a S6 \u003d 5 * 30,44 \u003d 152 H
F I7 \u003d m 7 * a E \u003d 15 * 29,8 \u003d 447 H
Për të përcaktuar momentet e forcave të inercisë, është e nevojshme të gjenden momentet e inercisë së masave të lidhjeve dhe nxitimet e tyre këndore. Për lidhjet 3 dhe 7, masat janë të përqendruara në pika, për lidhjen 1, dhe nxitimi këndor është zero, kështu që momentet e forcave të inercisë së kësaj lidhjeje janë zero.
Le të supozojmë se shpërndarja në masë e lidhjeve 2, 4 dhe 6 është uniforme përgjatë gjatësisë së tyre. Atëherë inercia e lidhjeve në lidhje me pikat S i është e barabartë me:
J S 2 \u003d m 2 * l 2 2 / 12 \u003d 8,125 * 0,325 2 / 12 \u003d 0,0715 kg * m 2
J S 4 \u003d m 4 * l 4 2 / 12 \u003d 5,5 * 0,22 2 / 12 \u003d 0,0222 kg * m 2
J S 6 \u003d m 6 * l 6 2 / 12 \u003d 5 * 0,2 2 / 12 \u003d 0,0167 kg * m 2
Përshpejtimet këndore të lidhjeve 2, 4, 5 dhe 6 përcaktohen nga nxitimet tangjenciale relative, prandaj:



Le të gjejmë momentet e forcave të inercisë së lidhjeve 2, 4, 6:
M I2 \u003d J S 2 * \u003d 0,0715 * 82,22 \u003d 5,88 Nm
M I4 \u003d J S 4 * \u003d 0,0222 * 42,73 \u003d 0,95 Nm
M I6 \u003d J S 4 * \u003d 0,0167 * 35,6 \u003d 0,59 Nm
2.2 Llogaritja e forcës së një grupi lidhjesh 6, 7.
Le të zgjedhim një grup lidhjesh 6, 7 nga mekanizmi, të rregullojmë të gjitha ngarkesat reale dhe forcat dhe momentet e forcave të inercisë.
Le të zëvendësojmë veprimin në grupin e konsideruar të lidhjeve të rrëzuara nga forcat. Pra, rrëshqitësi 7 veprohet nga një forcë nga ana e raftit - udhëzuesi i rrëshqitësit. Në mungesë të fërkimit, forca e ndërveprimit drejtohet pingul me sipërfaqet kontaktuese, d.m.th., pingul me drejtimin e lëvizjes së rrëshqitësit, dhe ende nuk dihet majtas ose djathtas, prandaj, së pari do ta drejtojmë këtë forcë në të djathtë. Nëse pas llogaritjeve rezulton se është negative, atëherë është e nevojshme të ndryshoni drejtimin në të kundërtën.
Dy numra vendosen në indeksin e përcaktimit: i pari tregon se nga cila lidhje vepron forca, dhe i dyti tregon se në cilën lidhje vepron kjo forcë.
Në pikën D nga lidhja 5, lidhja 6 ndikohet nga forca R 56. As madhësia dhe as drejtimi i kësaj force nuk dihet, prandaj ne e përcaktojmë atë me dy përbërës: e drejtojmë njërën përgjatë lidhjes dhe e quajmë përbërës normal, dhe të dytën pingul me lidhjen dhe e quajmë përbërës tangjencial. drejtimi paraprak i këtyre komponentëve zgjidhet në mënyrë arbitrare, dhe drejtimi aktual përcaktohet nga shenja e forcës pas llogaritjeve.
Forca e rezistencës së dobishme vepron gjithashtu në rrëshqitësin E, por është e barabartë me zero.
Të vendosim të gjitha forcat e renditura në grupin e zgjedhur të lidhjeve dhe të përcaktojmë reaksionet e panjohura në çiftet kinematike E, D - R E dhe R 56 .
Së pari, ne përcaktojmë përbërësin tangjencial të forcës R 56 nga gjendja e ekuilibrit të lidhjes 6. Duke barazuar me zero shumën e momenteve të forcave në lidhje me pikën E, marrim:

Momenti i forcave të inercisë duhet të ndahet me sepse lidhjet tregohen në një shkallë, dhe vlerat e tyre të marra nga vizatimi përdoren në llogaritjet.
Komponenti normal i forcës R 56 dhe forca R E gjenden me një metodë grafike nga një shumëkëndësh vektorial i ndërtuar për një grup lidhjesh 6, 7. Dihet se në një ekuilibër force, një shumëkëndësh i përbërë nga vektorë të forcës duhet të mbyllet:
Meqenëse drejtimet e vijave të veprimit të përbërësit normal të forcës R 56 dhe R E janë të njohura, atëherë duke ndërtuar një shumëkëndësh të hapur më parë nga vektorët e forcës së njohur, ai mund të mbyllet nëse vizatojmë vija të drejta në fillim të vektorit të parë dhe në fund të vektorit të fundit, paralel me drejtimet e forcave të dëshiruara. Pika e kryqëzimit të këtyre vijave do të përcaktojë madhësinë e vektorëve të dëshiruar dhe drejtimet e tyre aktuale.
Nga konstruksionet shihet se drejtimi i forcës R 76 është nga n në m, dhe forca R 67 është nga m në n.
R 56 \u003d * \u003d 1/4 * 209,7 \u003d 52,43 N
R E \u003d * \u003d 1/4 * 69,3 \u003d 17,33 N
2.3 Llogaritja e forcës së një grupi lidhjesh 5.4.
Le të zgjedhim një grup lidhjesh 4, 5 nga mekanizmi, të rregullojmë të gjitha ngarkesat reale dhe forcat dhe momentet e forcave të inercisë, reagimet e lidhjeve të hedhura. Në pikën D vepron forca R 65, e cila është e barabartë me R 56 dhe është e drejtuar përballë saj.
Të panjohurat janë: forca e bashkëveprimit të 4 dhe 2 lidhjeve, forca e bashkëveprimit të 5 lidhjeve dhe rafteve.
Në pikën C nga lidhja 2, lidhja 4 ndikohet nga forca R 24. As madhësia dhe as drejtimi i kësaj force nuk dihet, prandaj ne e përcaktojmë atë me dy përbërës: e drejtojmë njërën përgjatë lidhjes dhe e quajmë përbërës normal, dhe të dytën pingul me lidhjen dhe e quajmë përbërës tangjencial. drejtimi paraprak i këtyre komponentëve zgjidhet në mënyrë arbitrare, dhe drejtimi aktual përcaktohet nga shenja e forcës pas llogaritjeve.
Së pari, ne përcaktojmë përbërësin tangjencial të forcës R 24 nga gjendja e ekuilibrit të lidhjes 4. Duke barazuar me zero shumën e momenteve të forcave rreth pikës D, marrim:

Komponenti normal i forcës R 24 dhe forca R O 1 gjenden me një metodë grafike nga një shumëkëndësh vektorial i ndërtuar për një grup lidhjesh 5, 4. Dihet se në një ekuilibër force, një shumëkëndësh i përbërë nga vektorë të forcës duhet të mbyllet:
Le të përcaktojmë madhësinë e reaksioneve në çifte kinematike:
R 24 \u003d * \u003d 1 * 26.6 \u003d 26.6 N
R O 1 \u003d * \u003d 1 * 276,6 \u003d 276,6 N
2.4 Llogaritja e forcës së një grupi lidhjesh 2, 3.
Le të zgjedhim një grup lidhjesh 2, 3 nga mekanizmi, të rregullojmë të gjitha ngarkesat reale dhe forcat dhe momentet e forcave të inercisë, reagimet e lidhjeve të rënë. Në pikën C, vepron forca R 24, e cila është e barabartë me R 24 dhe është e drejtuar përballë saj.
Të panjohurat janë: forca e bashkëveprimit të 1 dhe 2 lidhjeve, forca e bashkëveprimit të 2 lidhjeve dhe rrëshqitësi.
Në pikën C nga lidhja 1, lidhja 2 ndikohet nga forca R 12. As madhësia dhe as drejtimi i kësaj force nuk dihet, prandaj ne e përcaktojmë atë me dy përbërës: e drejtojmë njërën përgjatë lidhjes dhe e quajmë përbërës normal, dhe të dytën pingul me lidhjen dhe e quajmë përbërës tangjencial. drejtimi paraprak i këtyre komponentëve zgjidhet në mënyrë arbitrare, dhe drejtimi aktual përcaktohet nga shenja e forcës pas llogaritjeve.
Së pari, ne përcaktojmë komponentin tangjencial të forcës R 12 nga gjendja e ekuilibrit të lidhjes 2. Duke barazuar shumën e momenteve të forcave në lidhje me pikën A me zero, marrim:

Komponenti normal i forcës R 12 dhe forca R B gjenden me një metodë grafike nga një shumëkëndësh vektorial i ndërtuar për një grup lidhjesh 2, 3. Dihet se me një ekuilibër të forcës, një shumëkëndësh i përbërë nga vektorë të forcës duhet të mbyllet:
Meqenëse drejtimet e vijave të veprimit të përbërësit normal të forcës R 24 dhe R O 1 janë të njohura, atëherë duke ndërtuar një shumëkëndësh të hapur më parë nga vektorët e forcës së njohur, ai mund të mbyllet nëse vizatojmë vija të drejta në fillim të vektorit të parë dhe në fund të vektorit të fundit, paralel me drejtimet e forcave të dëshiruara. Pika e kryqëzimit të këtyre vijave do të përcaktojë madhësinë e vektorëve të dëshiruar dhe drejtimet e tyre aktuale.
Le të përcaktojmë madhësinë e reaksioneve në çifte kinematike:
R 12 \u003d * \u003d 1/2 * 377,8 \u003d 188,9 N
R B \u003d * \u003d 1/2 * 55,4 \u003d 27,7 N
2.5 Llogaritja e fuqisë së lidhjes kryesore.
Lidhja kryesore është zakonisht e balancuar, domethënë qendra e masës së saj është në boshtin e rrotullimit. Kjo kërkon që forca e inercisë së kundërpeshës së montuar në vazhdimin e manivelit OA të jetë e barabartë me forcën e inercisë së lidhjes OA:

m \u003d M 1 / l OA \u003d 3,125 / 0,125 \u003d 25 kg - masë për njësi gjatësi.
Nga këtu është e mundur të përcaktohet masa e kundërpeshës m 1 , duke pasur parasysh distancën e saj r 1 nga boshti i rrotullimit. Në r 1 = 0,5 * l m 1 = M 1 (masa e lidhjes OA).
Në pikën A, një forcë R 21 vepron në lidhjen 1 nga lidhja 2, momenti i së cilës në lidhje me pikën O është i barabartë me momentin e balancimit.
Në këtë rast, në pikën O, ndodh një reaksion R O, i cili është i barabartë dhe i kundërt me forcën R 21. Nëse forca e gravitetit të lidhjes është në përpjesëtim me forcën R 21, atëherë duhet të merret parasysh kur përcaktohet reagimi i mbështetjes O, i cili mund të merret nga ekuacioni i vektorit:
![]()
2.6 Llogaritja e fuqisë së lidhjes kryesore me metodën Zhukovsky.
Në planin e shpejtësive të menjëhershme të mekanizmit, të rrotulluar me 90 0 në drejtim të rrotullimit, ne zbatojmë të gjitha forcat që veprojnë në mekanizëm dhe hartojmë një ekuacion për momentet e forcave që veprojnë në lidhje me polin.
Përgjigjet e pyetjeve të provimit në TMM
Universiteti Shtetëror i Moskës
Ekologji Inxhinierike
Teoria e makinave dhe mekanizmave (TMM)
Pyetjet e provimit
për grupet e studimit të departamentit ditor.
1. Struktura e mekanizmave
1.1. Makina dhe mekanizmi. Klasifikimi i mekanizmave sipas veçorive funksionale dhe strukturore-konstruktive.
PËRGJIGJE: Sipas përcaktimit të Akademik Artobolevsky:
Makinë- ekzistojnë pajisje të krijuara nga njeriu për të studiuar dhe përdorur ligjet e natyrës për të lehtësuar punën fizike dhe mendore, për të rritur produktivitetin e saj duke e zëvendësuar pjesërisht ose plotësisht në funksionet e punës dhe fiziologjike.
Mekanizmi- një sistem trupash të krijuar për të kthyer lëvizjen e një ose më shumë trupave në lëvizjen e kërkuar të trupave të tjerë të ngurtë. Nëse trupat e lëngët ose të gaztë janë të përfshirë në transformimin e lëvizjes, atëherë mekanizmi quhet hidraulik ose pneumatik. Zakonisht, mekanizmi ka një lidhje hyrëse që merr lëvizje nga motori dhe një lidhje dalëse e lidhur me trupin e punës ose treguesin e instrumentit. Mekanizmat janë të sheshtë dhe hapësinorë.
Klasifikimi i makinerive sipas qëllimit funksional:
Energjia (motorë, gjeneratorë).
Punëtorët (transporti, teknologjik).
Informacioni (kontrolli dhe menaxhimi, matematikor).
Kibernetike.
Makinat përbëhen nga mekanizma.
Sipas klasifikimit funksional, ekzistojnë:
Mekanizmat e motorëve dhe konvertuesve;
Mekanizmat ekzekutiv;
mekanizmat e transmetimit;
Mekanizmat e kontrollit, rregullimit, rregullimit;
Mekanizmat e ushqyerjes, ushqyerjes, renditjes;
Mekanizmat për numërim, peshim, paketim.
Ka shumë të përbashkëta për sa i përket strukturës dhe metodologjisë për llogaritjen e parametrave të tyre mekanikë.
Klasifikimi strukturor-konstruktiv:
Mekanizmat e levave;
Mekanizmat e kamerës;
Mekanizmat e ingranazheve (përbëhen nga rrota ingranazhesh);
Të kombinuara.
1.2. Mekanizmat e levës. Avantazhet dhe disavantazhet. Aplikimi në pajisjet teknike.
PËRGJIGJE: Mekanizmat e levave përbëhen nga trupa të bërë në formën e levave, shufrave. Këto shufra ose leva ndërveprojnë me njëri-tjetrin përgjatë sipërfaqes. Prandaj, mekanizmat e levës janë në gjendje të perceptojnë dhe transmetojnë forca të rëndësishme.
Ato përdoren si pajisjet kryesore teknologjike. Megjithatë, riprodhimi i ligjit të kërkuar të lëvizjes nga mekanizma të tillë është shumë i kufizuar.
1.3. Mekanizmat e kamerës. Llojet e mekanizmave të kamerës. Avantazhet dhe disavantazhet. Qellimi kryesor.
PËRGJIGJE: Mekanizmi i kamerës përbëhet nga një trup lakor, natyra e lëvizjes së të cilit përcakton lëvizjen e të gjithë mekanizmit. Avantazhi kryesor është se, pa ndryshuar numrin e lidhjeve, çdo ligj i lëvizjes mund të riprodhohet duke ndryshuar profilin e kamerës. Por në mekanizmin e kamerës ka lidhje që prekin në një pikë ose përgjatë një linje, gjë që kufizon ndjeshëm sasinë e forcës së transmetuar për shkak të shfaqjes së presioneve specifike shumë të larta. Prandaj, mekanizmat e kamerës përdoren kryesisht si një mjet për automatizimin e procesit teknologjik, ku kamera luan rolin e një bartësi të programit të fortë.
1.4. mekanizmat e ingranazheve. Llojet e mekanizmave të ingranazheve. Qellimi kryesor.
PËRGJIGJE: mekanizmi i marsheve quhet një mekanizëm, i cili përfshin rrotat e ingranazheve (një trup që ka një sistem të mbyllur zgjatimesh ose dhëmbësh).
Mekanizmat e ingranazheve përdoren kryesisht për të transmetuar lëvizje rrotulluese me një ndryshim, nëse është e nevojshme, në madhësinë dhe drejtimin e shpejtësisë këndore.
Transmetimi i lëvizjes në këto mekanizma kryhet për shkak të presionit anësor të dhëmbëve të profilizuar posaçërisht. Për të riprodhuar një raport të caktuar të shpejtësive këndore, profilet e dhëmbëve duhet të jenë të përkulura reciproke, domethënë, profili i dhëmbit të njërës rrotë duhet të korrespondojë me një profil dhëmbësh të përcaktuar mirë të rrotës tjetër. Profilet e dhëmbëve mund të përcaktohen nga kthesa të ndryshme, por më të zakonshmet janë mekanizmat me një profil dhëmbi involute, domethënë me një dhëmb të përshkruar përgjatë një involute.
Për të riprodhuar një raport konstant të shpejtësive këndore, përdoren mekanizma me ingranazhe të rrumbullakëta.
Ka mekanizma të sheshtë dhe hapësinorë. Në një mekanizëm të sheshtë, boshtet janë paralele, ndërsa në atë hapësinor kryqëzohen ose kryqëzohen. Në një mekanizëm të sheshtë, rrotat kanë një formë cilindrike, në atë hapësinore ato janë konike (nëse akset kryqëzohen).
Shumë e larmishme. Disa prej tyre janë një kombinim i vetëm trupave të ngurtë, të tjerët janë të përbërë nga trupa hidraulikë, pneumatikë ose pajisje elektrike, magnetike dhe të tjera. Prandaj, mekanizma të tillë quhen hidraulikë, pneumatikë, elektrikë, etj.
Nga pikëpamja e qëllimit të tyre funksional, mekanizmat zakonisht ndahen në llojet e mëposhtme:
Mekanizmat e motorit konvertojnë lloje të ndryshme të energjisë në punë mekanike (për shembull, mekanizmat e motorëve me djegie të brendshme, motorët me avull, motorët elektrikë, turbinat, etj.).
Mekanizmat e konvertuesve (gjeneratorëve) konvertojnë punën mekanike në lloje të tjera të energjisë (për shembull, mekanizmat e pompave, kompresorëve, disqet hidraulike, etj.).
Mekanizmi i transmetimit (drive) ka si detyrë kalimin e lëvizjes nga motori në makinën teknologjike ose aktivizuesin, duke e shndërruar këtë lëvizje në të nevojshme për funksionimin e kësaj makine ose aktuatori teknologjik.
Një aktivizues është një mekanizëm që ndikon drejtpërdrejt në mjedisin ose objektin e përpunuar. Detyra e tij është të ndryshojë formën, gjendjen, pozicionin dhe vetitë e mediumit ose objektit të përpunuar (për shembull, mekanizmat e makinerive të përpunimit të metaleve, presave, transportuesve, mullinjve të rrotullimit, ekskavatorëve, makinave ngritëse, etj.).
Mekanizmat e kontrollit, kontrollit dhe rregullimit janë mekanizma dhe pajisje të ndryshme për sigurimin dhe kontrollin e dimensioneve të objekteve të përpunuara (për shembull, mekanizmat matës për kontrollin e dimensioneve, presionit, niveleve të lëngjeve; rregullatorë që i përgjigjen devijimit të shpejtësisë këndore të boshtit kryesor të makinës dhe vendosin shpejtësinë e specifikuar të këtij boshti; një mekanizëm që rregullon distancën e rrotullimit, etj.).
Mekanizmat për furnizimin e transportit, ushqimin dhe klasifikimin e mediave dhe objekteve të përpunuara përfshijnë mekanizma për gërvishtjet me vidë, ashensorë kruese dhe kovash për transportin dhe furnizimin e materialeve me shumicë, mekanizmat për ngarkimin e gropave për pjesët bosh, mekanizmat për klasifikimin e produkteve të gatshme sipas madhësisë, peshës, konfigurimit, etj.
Mekanizmat për numërimin automatik, peshimin dhe paketimin e produkteve të gatshme përdoren në shumë makina, kryesisht për prodhimin e produkteve në masë. Duhet të kihet parasysh se këta mekanizma mund të jenë edhe aktivizues nëse përfshihen në makina speciale të krijuara për këto qëllime.
Ky klasifikim tregon vetëm shumëllojshmërinë e aplikimeve funksionale të mekanizmave, të cilat mund të zgjerohen ndjeshëm. Sidoqoftë, mekanizmat që kanë të njëjtën strukturë, kinematikë dhe dinamikë përdoren shpesh për të kryer funksione të ndryshme. Prandaj, për studimin në teorinë e mekanizmave dhe makinave, veçohen mekanizmat që kanë metoda të përbashkëta për sintezën e tyre dhe analizën e punës, pavarësisht nga qëllimi i tyre funksional. Nga ky këndvështrim, dallohen llojet e mëposhtme të mekanizmave.