ಅಸಮಕಾಲಿಕ ಮೋಟರ್ಗಾಗಿ ಆವರ್ತನ ಪರಿವರ್ತಕವನ್ನು ಹೇಗೆ ಆಯ್ಕೆ ಮಾಡುವುದು. ಒಟ್ಟಿಗೆ ಮೂರು-ಹಂತದ ವಿದ್ಯುತ್ ಮೋಟರ್ಗಾಗಿ ಆವರ್ತನ ಸ್ವಿಚ್ನ ಉದ್ದೇಶವನ್ನು ನೋಡೋಣ. ಆವರ್ತನ ಪರಿವರ್ತಕಗಳು ಯಾವುವು
ಆವರ್ತನ ಪರಿವರ್ತಕವನ್ನು ಆಯ್ಕೆಮಾಡಲಾಗುತ್ತಿದೆ
ನಿರ್ದಿಷ್ಟ ಲೋಡ್ಗಾಗಿ ಆವರ್ತನ ಪರಿವರ್ತಕದ ಗುಣಲಕ್ಷಣಗಳನ್ನು ನಿರ್ಧರಿಸುವಾಗ, ಮೊದಲ ಹಂತವು ಲೋಡ್ ಗುಣಲಕ್ಷಣಗಳನ್ನು ಪರಿಗಣಿಸುವುದು. ವಿದ್ಯುತ್ ಮೋಟರ್ನ ಗುಣಲಕ್ಷಣಗಳನ್ನು ಅವಲಂಬಿಸಿ ವಿಧಾನದ ಆಯ್ಕೆಯೊಂದಿಗೆ ಅಗತ್ಯವಿರುವ ಔಟ್ಪುಟ್ ನಿಯತಾಂಕಗಳನ್ನು ಲೆಕ್ಕಾಚಾರ ಮಾಡಲು ನಾಲ್ಕು ವಿಭಿನ್ನ ವಿಧಾನಗಳಿವೆ.
ಲೋಡ್ ಗುಣಲಕ್ಷಣಗಳು
ಆವರ್ತನ ಪರಿವರ್ತಕವನ್ನು ಗಾತ್ರ ಮಾಡುವ ಮೊದಲು, ಎರಡು ಹೆಚ್ಚು ವ್ಯಾಪಕವಾಗಿ ಬಳಸುವ ಲೋಡ್ ರೇಟಿಂಗ್ಗಳ ನಡುವೆ ವ್ಯತ್ಯಾಸವನ್ನು ಕಂಡುಹಿಡಿಯುವುದು ಅವಶ್ಯಕ. ಲೋಡ್ ಗುಣಲಕ್ಷಣಗಳು ಈ ಕೆಳಗಿನಂತೆ ಪರಸ್ಪರ ಭಿನ್ನವಾಗಿರುತ್ತವೆ:
ಅಕ್ಕಿ. 1. ಸ್ಥಿರ ಮತ್ತು ಕ್ವಾಡ್ರಾಟಿಕ್ ಲೋಡ್ ಕ್ಷಣ
ಕೇಂದ್ರಾಪಗಾಮಿ ಪಂಪ್ಗಳು ಮತ್ತು ಅಭಿಮಾನಿಗಳ ವೇಗವು ಹೆಚ್ಚಾದಾಗ, ವಿದ್ಯುತ್ ಬಳಕೆಯು ಮೂರನೇ ಶಕ್ತಿಗೆ ಹೆಚ್ಚಾಗುತ್ತದೆ (P = n 3).
ಕೇಂದ್ರಾಪಗಾಮಿ ಪಂಪ್ಗಳು ಮತ್ತು ಫ್ಯಾನ್ಗಳ ವಿಶಿಷ್ಟ ಕಾರ್ಯಾಚರಣಾ ವ್ಯಾಪ್ತಿಯು 50% ಮತ್ತು 90% ವೇಗದ ನಡುವೆ ಇರುತ್ತದೆ. ಲೋಡ್ ಅಂಶವು ವೇಗದ ವರ್ಗದೊಂದಿಗೆ ಹೆಚ್ಚಾಗುತ್ತದೆ, ಅಂದರೆ ಸರಿಸುಮಾರು 30 ರಿಂದ 80% ವರೆಗೆ.
ಈ ಎರಡೂ ಅಂಶಗಳು ಆವರ್ತನ ಪರಿವರ್ತಕದಿಂದ ನಿಯಂತ್ರಿಸಲ್ಪಡುವ ವಿದ್ಯುತ್ ಮೋಟರ್ನ ಟಾರ್ಕ್ ಗುಣಲಕ್ಷಣಗಳಲ್ಲಿ ಪ್ರತಿಫಲಿಸುತ್ತದೆ.
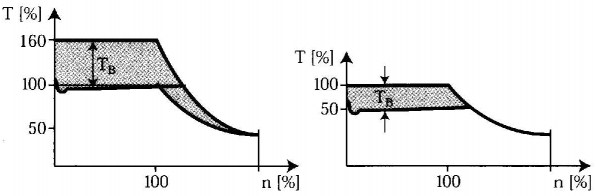
ಅಂಕಿ 2 ಮತ್ತು 3 ಎರಡು ಗಾತ್ರದ ಆವರ್ತನ ಪರಿವರ್ತಕಗಳ ಟಾರ್ಕ್ ಗುಣಲಕ್ಷಣಗಳನ್ನು ತೋರಿಸುತ್ತದೆ, ಅದರಲ್ಲಿ ಒಂದು (ಚಿತ್ರ 3) ಇತರಕ್ಕಿಂತ ಚಿಕ್ಕದಾದ ವಿದ್ಯುತ್ ವ್ಯಾಪ್ತಿಯನ್ನು ಹೊಂದಿದೆ. ಎರಡೂ ಟಾರ್ಕ್ ಗುಣಲಕ್ಷಣಗಳನ್ನು ಕೇಂದ್ರಾಪಗಾಮಿ ಪಂಪ್ನ ಅದೇ ಲೋಡ್ ಗುಣಲಕ್ಷಣಗಳಿಗೆ ಹೊಂದಿಸಲಾಗಿದೆ.
ಅಂಜೂರದಲ್ಲಿ. 2 ಪಂಪ್ನ ಸಂಪೂರ್ಣ ಕಾರ್ಯಾಚರಣಾ ವ್ಯಾಪ್ತಿಯು (0-100%) ಮೋಟಾರ್ ನಿಯತಾಂಕಗಳ ರೇಟ್ ಮೌಲ್ಯಗಳಲ್ಲಿದೆ. ಸಾಮಾನ್ಯ ಪಂಪ್ ಆಪರೇಟಿಂಗ್ ಶ್ರೇಣಿಯು 30-80% ಆಗಿರುವುದರಿಂದ, ಕಡಿಮೆ ಔಟ್ಪುಟ್ ಶಕ್ತಿಯೊಂದಿಗೆ ಆವರ್ತನ ಪರಿವರ್ತಕವನ್ನು ಆಯ್ಕೆ ಮಾಡಬಹುದು.

ಅಕ್ಕಿ. 2. ಹೆಚ್ಚಿನ ವಿದ್ಯುತ್ ಆವರ್ತನ ಪರಿವರ್ತಕ
ಅಕ್ಕಿ. 3. ಕಡಿಮೆ ವಿದ್ಯುತ್ ಆವರ್ತನ ಪರಿವರ್ತಕ
ಲೋಡ್ ಟಾರ್ಕ್ ಸ್ಥಿರವಾಗಿದ್ದರೆ, ಮೋಟಾರು ಲೋಡ್ ಟಾರ್ಕ್ಗಿಂತ ಹೆಚ್ಚಿನ ಟಾರ್ಕ್ ಅನ್ನು ಉತ್ಪಾದಿಸಲು ಶಕ್ತವಾಗಿರಬೇಕು ಏಕೆಂದರೆ ಹೆಚ್ಚುವರಿ ಟಾರ್ಕ್ ಅನ್ನು ವೇಗವರ್ಧನೆಗಾಗಿ ಬಳಸಲಾಗುತ್ತದೆ.
ಹೆಚ್ಚಿನ ಆರಂಭಿಕ ಟಾರ್ಕ್ ಅನ್ನು ವೇಗಗೊಳಿಸಲು ಮತ್ತು ಖಚಿತಪಡಿಸಿಕೊಳ್ಳಲು, ಉದಾಹರಣೆಗೆ ಡ್ರೈವಿಂಗ್ ಬೆಲ್ಟ್ ಕನ್ವೇಯರ್ಗಳ ಸಂದರ್ಭದಲ್ಲಿ, ಆವರ್ತನ ಪರಿವರ್ತಕದಿಂದ ಅಭಿವೃದ್ಧಿಪಡಿಸಲಾದ 60% ಟಾರ್ಕ್ನ ಅಲ್ಪಾವಧಿಯ ಓವರ್ಲೋಡ್ ಟಾರ್ಕ್ ಸಾಕು. ಓವರ್ಲೋಡ್ ಟಾರ್ಕ್ ಲೋಡ್ನಲ್ಲಿ ಹಠಾತ್ ಹೆಚ್ಚಳವನ್ನು ನಿಭಾಯಿಸುವ ಸಾಮರ್ಥ್ಯವನ್ನು ಸಹ ಸಿಸ್ಟಮ್ಗೆ ಒದಗಿಸುತ್ತದೆ. ಯಾವುದೇ ಓವರ್ಲೋಡ್ ಟಾರ್ಕ್ ಅನ್ನು ಅನುಮತಿಸದ ಆವರ್ತನ ಪರಿವರ್ತಕವನ್ನು ಆಯ್ಕೆ ಮಾಡಬೇಕು ಆದ್ದರಿಂದ ವೇಗವರ್ಧಕ ಟಾರ್ಕ್ (T B) ದರದ ಟಾರ್ಕ್ನೊಳಗೆ ಇರುತ್ತದೆ.
ಅಕ್ಕಿ. 4. ಓವರ್ಲೋಡ್ ಟಾರ್ಕ್ ಅನ್ನು ವೇಗವರ್ಧನೆಗಾಗಿ ಬಳಸಲಾಗುತ್ತದೆ
ಲೋಡ್ ಗುಣಲಕ್ಷಣಗಳನ್ನು ನಿರ್ಧರಿಸುವಾಗ, ನಾಲ್ಕು ವಿಭಿನ್ನ ಸೆಟ್ ಮೋಟಾರು ವಿಶೇಷಣಗಳನ್ನು ಪರಿಗಣಿಸಲಾಗುತ್ತದೆ, ಆವರ್ತನ ಪರಿವರ್ತಕ ಶಕ್ತಿಯ ಗಾತ್ರದ ಆಯ್ಕೆಯ ಬಗ್ಗೆ ನಿರ್ಧಾರಗಳನ್ನು ತೆಗೆದುಕೊಳ್ಳಲು ಅನುವು ಮಾಡಿಕೊಡುತ್ತದೆ.
1. ಮೋಟಾರ್ ಸೇವಿಸುವ ಪ್ರಸ್ತುತ l M ಅನ್ನು ಆಧರಿಸಿ ಆವರ್ತನ ಪರಿವರ್ತಕವನ್ನು ತ್ವರಿತವಾಗಿ ಮತ್ತು ನಿಖರವಾಗಿ ಆಯ್ಕೆ ಮಾಡಬಹುದು. ಮೋಟಾರು ಸಂಪೂರ್ಣವಾಗಿ ಲೋಡ್ ಆಗದಿದ್ದರೆ, ಇದೇ ರೀತಿಯ ಸಿಸ್ಟಮ್ ಪೂರ್ಣ ಲೋಡ್ನಲ್ಲಿ ಚಾಲನೆಯಲ್ಲಿರುವಾಗ ಅದರ ಪ್ರಸ್ತುತವನ್ನು ಅಳೆಯಬಹುದು.

ಅಕ್ಕಿ. 5.
ಎಲೆಕ್ಟ್ರಿಕ್ ಮೋಟಾರ್ 7.5 kW, 3 x 400 V ವಿದ್ಯುತ್ 14.73 A ಅನ್ನು ಬಳಸುತ್ತದೆ.
ಆವರ್ತನ ಪರಿವರ್ತಕದ ತಾಂತ್ರಿಕ ದತ್ತಾಂಶಕ್ಕೆ ಸಂಬಂಧಿಸಿದಂತೆ, ಒಂದು ಪರಿವರ್ತಕವನ್ನು ಆಯ್ಕೆಮಾಡಲಾಗುತ್ತದೆ, ಅದರ ನಿರಂತರ ಗರಿಷ್ಠ ಔಟ್ಪುಟ್ ಪ್ರವಾಹವು ಸ್ಥಿರ ಅಥವಾ ಕ್ವಾಡ್ರಾಟಿಕ್ ಟಾರ್ಕ್ ಗುಣಲಕ್ಷಣದೊಂದಿಗೆ 14.73 A ಗಿಂತ ಹೆಚ್ಚಾಗಿರುತ್ತದೆ ಅಥವಾ ಸಮಾನವಾಗಿರುತ್ತದೆ.
ಸೂಚನೆ:
ಆವರ್ತನ ಪರಿವರ್ತಕವನ್ನು ವಿದ್ಯುತ್ (ವಿಧಾನಗಳು 2-4) ಆಧಾರದ ಮೇಲೆ ಆಯ್ಕೆ ಮಾಡಿದರೆ, ಅದೇ ವೋಲ್ಟೇಜ್ನಲ್ಲಿ ಆವರ್ತನ ಪರಿವರ್ತಕದ ತಾಂತ್ರಿಕ ಡೇಟಾದಲ್ಲಿ ನಿರ್ದಿಷ್ಟಪಡಿಸಿದ ಲೆಕ್ಕಾಚಾರದ ಶಕ್ತಿಯನ್ನು ಮತ್ತು ಶಕ್ತಿಯನ್ನು ಹೋಲಿಸುವುದು ಅವಶ್ಯಕ. ಆವರ್ತನ ಪರಿವರ್ತಕವನ್ನು ಪ್ರಸ್ತುತ (ವಿಧಾನ 1) ಆಧರಿಸಿ ಲೆಕ್ಕ ಹಾಕಿದರೆ, ಆವರ್ತನ ಪರಿವರ್ತಕದ ಔಟ್ಪುಟ್ ಪ್ರವಾಹವು ಇತರ ಡೇಟಾವನ್ನು ಪರಿಣಾಮ ಬೀರುವುದರಿಂದ ಇದು ಅನಿವಾರ್ಯವಲ್ಲ.
2. ಆವರ್ತನ ಪರಿವರ್ತಕವನ್ನು ಮೋಟಾರು ಸೇವಿಸುವ ಸ್ಪಷ್ಟ ವಿದ್ಯುತ್ S M ಮತ್ತು ಆವರ್ತನ ಪರಿವರ್ತಕದಿಂದ ಸರಬರಾಜು ಮಾಡಲಾದ ಸ್ಪಷ್ಟ ಶಕ್ತಿಯ ಆಧಾರದ ಮೇಲೆ ಆಯ್ಕೆ ಮಾಡಬಹುದು.

ಅಕ್ಕಿ. 6.
ಆವರ್ತನ ಪರಿವರ್ತಕದ ಲೆಕ್ಕಾಚಾರ ಮತ್ತು ಆಯ್ಕೆಯ ಉದಾಹರಣೆ:
ಎಲೆಕ್ಟ್ರಿಕ್ ಮೋಟಾರ್ 7.5 kW, 3x400 V ವಿದ್ಯುತ್ 14.73 A. Sm =U x I x √3 / 1000 = 400 x 14.73 √3 / 1000 = 10.2 kVA
ಆವರ್ತನ ಪರಿವರ್ತಕದ ತಾಂತ್ರಿಕ ದತ್ತಾಂಶಕ್ಕೆ ಸಂಬಂಧಿಸಿದಂತೆ, ಆವರ್ತನ ಪರಿವರ್ತಕವನ್ನು ಆಯ್ಕೆಮಾಡಲಾಗುತ್ತದೆ, ಅದರ ನಿರಂತರ ಗರಿಷ್ಠ ಔಟ್ಪುಟ್ ಶಕ್ತಿಯು ಸ್ಥಿರ ಅಥವಾ ಚತುರ್ಭುಜ ಟಾರ್ಕ್ ಗುಣಲಕ್ಷಣದೊಂದಿಗೆ 10.2 kVA ಗಿಂತ ಹೆಚ್ಚಾಗಿರುತ್ತದೆ ಅಥವಾ ಸಮಾನವಾಗಿರುತ್ತದೆ.
3. ವಿದ್ಯುತ್ ಮೋಟರ್ನಿಂದ ಉತ್ಪತ್ತಿಯಾಗುವ ವಿದ್ಯುತ್ R m ಗೆ ಅನುಗುಣವಾಗಿ ಆವರ್ತನ ಪರಿವರ್ತಕವನ್ನು ಸಹ ಆಯ್ಕೆ ಮಾಡಬಹುದು. ಆದಾಗ್ಯೂ, ಈ ವಿಧಾನವು ನಿಖರವಾಗಿಲ್ಲ, ಏಕೆಂದರೆ cos φ ಮತ್ತು ದಕ್ಷತೆ η ಲೋಡ್ನೊಂದಿಗೆ ಬದಲಾಗುತ್ತದೆ.

ಅಕ್ಕಿ. 7.
ಮೋಟಾರ್ ಶಕ್ತಿಯನ್ನು ಲೆಕ್ಕಾಚಾರ ಮಾಡುವ ಉದಾಹರಣೆ
cos φ = 0.80 ಮತ್ತು η = 0.81 ಹೊಂದಿರುವ 3 kW ಶಕ್ತಿಯೊಂದಿಗೆ ವಿದ್ಯುತ್ ಮೋಟಾರು S M = P M / (η x cos φ) = 3.0 / (0.80 x 0.81) = 4.6 kVA
ಆವರ್ತನ ಪರಿವರ್ತಕದ ತಾಂತ್ರಿಕ ದತ್ತಾಂಶಕ್ಕೆ ಸಂಬಂಧಿಸಿದಂತೆ, ಒಂದು ಪರಿವರ್ತಕವನ್ನು ಆಯ್ಕೆಮಾಡಲಾಗುತ್ತದೆ, ಅದರ ನಿರಂತರ ಗರಿಷ್ಠ ಔಟ್ಪುಟ್ ಶಕ್ತಿಯು ಸ್ಥಿರ ಅಥವಾ ಕ್ವಾಡ್ರಾಟಿಕ್ ಟಾರ್ಕ್ ಗುಣಲಕ್ಷಣದೊಂದಿಗೆ 4.6 kVA ಗಿಂತ ಹೆಚ್ಚಾಗಿರುತ್ತದೆ ಅಥವಾ ಸಮಾನವಾಗಿರುತ್ತದೆ.
4. ಪ್ರಾಯೋಗಿಕವಾಗಿ, ಹೆಚ್ಚಿನ ಆವರ್ತನ ಪರಿವರ್ತಕಗಳ ವಿದ್ಯುತ್ ರೇಟಿಂಗ್ ಅಸಮಕಾಲಿಕ ಮೋಟಾರ್ಗಳ ಪ್ರಮಾಣಿತ ಸರಣಿಗೆ ಅನುರೂಪವಾಗಿದೆ. ಆದ್ದರಿಂದ, ಈ ಪರಿಗಣನೆಯ ಆಧಾರದ ಮೇಲೆ ಆವರ್ತನ ಪರಿವರ್ತಕಗಳನ್ನು ಹೆಚ್ಚಾಗಿ ಆಯ್ಕೆ ಮಾಡಲಾಗುತ್ತದೆ, ಆದಾಗ್ಯೂ, ಅವುಗಳ ಗುಣಲಕ್ಷಣಗಳ ತಪ್ಪಾದ ನಿರ್ಣಯಕ್ಕೆ ಕಾರಣವಾಗಬಹುದು, ವಿಶೇಷವಾಗಿ ವಿದ್ಯುತ್ ಮೋಟರ್ ಸಂಪೂರ್ಣವಾಗಿ ಲೋಡ್ ಆಗದಿದ್ದರೆ.

ಅಕ್ಕಿ. 8.
ಆವರ್ತನ ಪರಿವರ್ತಕದಲ್ಲಿ ಪ್ರಸ್ತುತ ವಿತರಣೆ (ವಿದ್ಯುತ್ ಮೋಟರ್ನ cos φ (phi))
ಎಲೆಕ್ಟ್ರಿಕ್ ಮೋಟರ್ ಅನ್ನು ಮ್ಯಾಗ್ನೆಟೈಸಿಂಗ್ ಮಾಡುವ ಪ್ರವಾಹವನ್ನು ಆವರ್ತನ ಪರಿವರ್ತಕದ ಮಧ್ಯಂತರ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿರುವ ಕೆಪಾಸಿಟರ್ನಿಂದ ಸರಬರಾಜು ಮಾಡಲಾಗುತ್ತದೆ. ಮ್ಯಾಗ್ನೆಟೈಸಿಂಗ್ ಪ್ರವಾಹವು ಕೆಪಾಸಿಟರ್ ಮತ್ತು ಮೋಟರ್ (ಚಿತ್ರ 9) ನಡುವೆ ಹರಿಯುವ ಪ್ರತಿಕ್ರಿಯಾತ್ಮಕ ಪ್ರವಾಹವಾಗಿದೆ.

ಅಕ್ಕಿ. 9. ಆವರ್ತನ ಪರಿವರ್ತಕದಲ್ಲಿ ಪ್ರವಾಹಗಳು
ನೆಟ್ವರ್ಕ್ನಿಂದ ಸಕ್ರಿಯ ಪ್ರಸ್ತುತ (l W) ಮಾತ್ರ ಬರುತ್ತದೆ. ಇದಕ್ಕಾಗಿಯೇ ಆವರ್ತನ ಪರಿವರ್ತಕದ ಔಟ್ಪುಟ್ ಕರೆಂಟ್ ಯಾವಾಗಲೂ ಇನ್ಪುಟ್ ಕರೆಂಟ್ಗಿಂತ ಹೆಚ್ಚಾಗಿರುತ್ತದೆ. ಸಕ್ರಿಯ ಪ್ರವಾಹದ ಜೊತೆಗೆ, ಪ್ರಸ್ತುತ I ನಷ್ಟವನ್ನು ನೆಟ್ವರ್ಕ್ನಿಂದ ಸೇವಿಸಲಾಗುತ್ತದೆ (ನಷ್ಟ ಪ್ರಸ್ತುತ).
ಲೆಕ್ಕಾಚಾರದ ಉದಾಹರಣೆ
ಯಾವುದೇ ಲೋಡ್ನಲ್ಲಿ, 4-ಪೋಲ್ 1.1 kW ಮೋಟಾರ್ನ ಪ್ರಸ್ತುತವು 1.6 A. ಸಂಪರ್ಕಿತ ಆವರ್ತನ ಪರಿವರ್ತಕದ ಔಟ್ಪುಟ್ ಪ್ರವಾಹವು ಸುಮಾರು 1.6 A, ಮತ್ತು ಯಾವುದೇ-ಲೋಡ್ ಕಾರ್ಯಾಚರಣೆಯಲ್ಲಿ ಇನ್ಪುಟ್ ಪ್ರವಾಹವು ಬಹುತೇಕ ಶೂನ್ಯವಾಗಿರುತ್ತದೆ.
ಮೋಟಾರು ತಯಾರಕರು ಸಾಮಾನ್ಯವಾಗಿ ರೇಟ್ ಕರೆಂಟ್ನಲ್ಲಿ ಮೋಟರ್ನ cos φ ಅನ್ನು ಸೂಚಿಸುತ್ತಾರೆ. cos φ ನ ಕಡಿಮೆ ಮೌಲ್ಯದೊಂದಿಗೆ (ಉದಾಹರಣೆಗೆ, ಸಿಂಕ್ರೊನಸ್ ರಿಲಕ್ಟೆನ್ಸ್ ಮೋಟಾರ್ನ ಸಂದರ್ಭದಲ್ಲಿ), ಅದೇ ಶಕ್ತಿ ಮತ್ತು ವೋಲ್ಟೇಜ್ ಮೌಲ್ಯಗಳಲ್ಲಿ ವಿದ್ಯುತ್ ಮೋಟರ್ನ ರೇಟ್ ಮಾಡಲಾದ ಪ್ರವಾಹವು ಈ ಕೆಳಗಿನ ಸಮೀಕರಣದಿಂದ ನೋಡಬಹುದಾದಂತೆ ಹೆಚ್ಚಾಗಿರುತ್ತದೆ:
I S = I W / cos φ
ಎಲೆಕ್ಟ್ರಿಕ್ ಮೋಟರ್ (ವಿಧಾನ 1) ನ ದರದ ಪ್ರವಾಹವನ್ನು ಆಧರಿಸಿ ಆವರ್ತನ ಪರಿವರ್ತಕವನ್ನು ಆಯ್ಕೆ ಮಾಡಿದರೆ, ನಂತರ ವಿದ್ಯುತ್ ಮೋಟರ್ನ ರೇಟ್ ಟಾರ್ಕ್ ಕಡಿಮೆಯಾಗುವುದಿಲ್ಲ.
ಪ್ರತಿಕ್ರಿಯಾತ್ಮಕ ಪ್ರವಾಹವನ್ನು ಸರಿದೂಗಿಸಲು ಮೋಟಾರ್ ಟರ್ಮಿನಲ್ಗಳಿಗೆ ಸಂಪರ್ಕಿಸಲಾದ ಕೆಪಾಸಿಟರ್ ಅನ್ನು ತೆಗೆದುಹಾಕಬೇಕು. ಆವರ್ತನ ಪರಿವರ್ತಕದ ಹೆಚ್ಚಿನ ಸ್ವಿಚಿಂಗ್ ಆವರ್ತನದಿಂದಾಗಿ, ಕೆಪಾಸಿಟರ್ ಶಾರ್ಟ್ ಸರ್ಕ್ಯೂಟ್ನಂತೆ ವರ್ತಿಸುತ್ತದೆ ಮತ್ತು ಮೋಟಾರ್ ಪ್ರವಾಹದಲ್ಲಿ ಗಮನಾರ್ಹ ಹೆಚ್ಚಳವನ್ನು ಉಂಟುಮಾಡುತ್ತದೆ. ಇನ್ವರ್ಟರ್ ಇದನ್ನು ನೆಲದ ದೋಷ ಅಥವಾ ಶಾರ್ಟ್ ಸರ್ಕ್ಯೂಟ್ ಎಂದು ಅರ್ಥೈಸುತ್ತದೆ ಮತ್ತು ಸ್ಥಗಿತಗೊಳ್ಳುತ್ತದೆ.
ಮೋಟಾರ್ ವೇಗ ನಿಯಂತ್ರಣ
ಆವರ್ತನ ಪರಿವರ್ತಕದ ಔಟ್ಪುಟ್ ಆವರ್ತನ ಮತ್ತು ಆದ್ದರಿಂದ ಮೋಟಾರ್ ವೇಗವನ್ನು ಒಂದು ಅಥವಾ ಹೆಚ್ಚಿನ ಸಂಕೇತಗಳಿಂದ ನಿಯಂತ್ರಿಸಲಾಗುತ್ತದೆ (0-10 V, 4-20 mA ಅಥವಾ ವೋಲ್ಟೇಜ್ ಕಾಳುಗಳು). ವೇಗ ಸಂಕೇತವನ್ನು ಅನ್ವಯಿಸಿದಾಗ, ಮೋಟಾರ್ ವೇಗವು ಹೆಚ್ಚಾಗುತ್ತದೆ ಮತ್ತು ಮೋಟಾರ್ ಟಾರ್ಕ್ ಕರ್ವ್ನ ಲಂಬ ಭಾಗವು ಬಲಕ್ಕೆ ಬದಲಾಗುತ್ತದೆ (ಚಿತ್ರ 10).

ಅಕ್ಕಿ. 10. ನಿಯಂತ್ರಣ ಸಂಕೇತ ಮತ್ತು ಮೋಟಾರ್ ಟಾರ್ಕ್ ಗುಣಲಕ್ಷಣಗಳ ನಡುವಿನ ಸಂಬಂಧ
ಲೋಡ್ ಟಾರ್ಕ್ ಮೋಟರ್ನ ರೇಟ್ ಟಾರ್ಕ್ಗಿಂತ ಕಡಿಮೆಯಿದ್ದರೆ, ವೇಗವು ಅಗತ್ಯ ಮೌಲ್ಯವನ್ನು ತಲುಪುತ್ತದೆ. ಅಂಜೂರದಲ್ಲಿ ತೋರಿಸಿರುವಂತೆ. 11, ಲೋಡ್ ಗುಣಲಕ್ಷಣಗಳು ಲಂಬ ಭಾಗದಲ್ಲಿ (ಪಾಯಿಂಟ್ A ನಲ್ಲಿ) ವಿದ್ಯುತ್ ಮೋಟರ್ನ ಟಾರ್ಕ್ ಗುಣಲಕ್ಷಣಗಳೊಂದಿಗೆ ಛೇದಿಸುತ್ತವೆ. ಛೇದನವು ಸಮತಲ ಭಾಗದಲ್ಲಿ (ಪಾಯಿಂಟ್ ಬಿ) ಸಂಭವಿಸಿದಲ್ಲಿ, ವಿದ್ಯುತ್ ಮೋಟರ್ನ ವೇಗವು ದೀರ್ಘಕಾಲದವರೆಗೆ ಅನುಗುಣವಾದ ಮೌಲ್ಯವನ್ನು ಮೀರುವಂತಿಲ್ಲ ಆವರ್ತನ ಪರಿವರ್ತಕವು ಶಾರ್ಟ್ ಸರ್ಕ್ಯೂಟ್ ಪ್ರವಾಹದ ಮಿತಿಯನ್ನು ಮುಚ್ಚದೆಯೇ (ಪಾಯಿಂಟ್ ಸಿ) ಮೀರಲು ಅನುಮತಿಸುತ್ತದೆ, ಆದರೆ ಹೆಚ್ಚುವರಿ ಅವಧಿಯು ಸಮಯಕ್ಕೆ ಸೀಮಿತವಾಗಿರಬೇಕು.

ಅಕ್ಕಿ. 11. ಮೋಟಾರ್ ಕರೆಂಟ್ ಅಲ್ಪಾವಧಿಗೆ ಪ್ರಸ್ತುತ ಮಿತಿಯನ್ನು ಮೀರಬಹುದು
ವೇಗವರ್ಧನೆ ಮತ್ತು ನಿಧಾನಗೊಳಿಸುವ ಇಳಿಜಾರುಗಳು
ವೇಗೋತ್ಕರ್ಷದ ಲಕ್ಷಣವು (ರಾಂಪ್) ತಿರುಗುವಿಕೆಯ ವೇಗವನ್ನು ಹೆಚ್ಚಿಸುವ ದರವನ್ನು ತೋರಿಸುತ್ತದೆ ಮತ್ತು ವೇಗವರ್ಧನೆಯ ಸಮಯ t acc ಎಂದು ನಿರ್ದಿಷ್ಟಪಡಿಸಲಾಗಿದೆ. ಈ ಇಳಿಜಾರುಗಳು ಪ್ರಾಥಮಿಕವಾಗಿ ರೇಟ್ ಮಾಡಲಾದ ಮೋಟಾರು ಆವರ್ತನವನ್ನು ಆಧರಿಸಿವೆ, ಉದಾಹರಣೆಗೆ 5 ಸೆ ರಾಂಪ್ ಎಂದರೆ ಆವರ್ತನ ಪರಿವರ್ತಕವು ಶೂನ್ಯದಿಂದ ರೇಟ್ ಮಾಡಲಾದ ಮೋಟಾರ್ ಆವರ್ತನಕ್ಕೆ (f = 50 Hz) ಹೋಗಲು 5 ಸೆಕೆಂಡುಗಳನ್ನು ತೆಗೆದುಕೊಳ್ಳುತ್ತದೆ.

ಅಕ್ಕಿ. 12. ವೇಗವರ್ಧನೆ ಮತ್ತು ನಿಧಾನಗೊಳಿಸುವ ಸಮಯ
ಬ್ರೇಕಿಂಗ್ ರಾಂಪ್ ವೇಗವು ಎಷ್ಟು ಬೇಗನೆ ಕಡಿಮೆಯಾಗುತ್ತದೆ ಎಂಬುದನ್ನು ತೋರಿಸುತ್ತದೆ. ಇದು ಬ್ರೇಕಿಂಗ್ ಸಮಯ t dec ರೂಪದಲ್ಲಿ ನಿರ್ದಿಷ್ಟಪಡಿಸಲಾಗಿದೆ.
ಮೋಟಾರ್ ಯಾವಾಗಲೂ ಇನ್ವರ್ಟರ್ ಔಟ್ಪುಟ್ ಆವರ್ತನವನ್ನು ಟ್ರ್ಯಾಕ್ ಮಾಡುವ ಕಾರಣ ವೇಗವರ್ಧನೆಯಿಂದ ನಿಧಾನಕ್ಕೆ ನೇರ ಪರಿವರ್ತನೆ ಸಾಧ್ಯ.
ಎಲೆಕ್ಟ್ರಿಕ್ ಮೋಟಾರ್ ಶಾಫ್ಟ್ನ ಜಡತ್ವದ ಕ್ಷಣವನ್ನು ತಿಳಿದಿದ್ದರೆ, ಅತ್ಯುತ್ತಮ ವೇಗವರ್ಧನೆ ಮತ್ತು ನಿಧಾನಗೊಳಿಸುವ ಸಮಯವನ್ನು ಲೆಕ್ಕಹಾಕಬಹುದು.
t acc = J x (n 2 -n 1)/[(T acc – T fric) x 9.55]
tdec = J x (n 2 -n 1)/[(T acc + T fric) x 9.55]
ಜೆ ವಿದ್ಯುತ್ ಮೋಟರ್ ಶಾಫ್ಟ್ನ ಜಡತ್ವದ ಕ್ಷಣವಾಗಿದೆ.
ಟಿ ಫ್ರಿಕ್ ಎನ್ನುವುದು ವ್ಯವಸ್ಥೆಯ ಘರ್ಷಣೆಯ ಕ್ಷಣವಾಗಿದೆ.
ಟಾಸ್ - ವೇಗವರ್ಧನೆಗೆ ಬಳಸಲಾಗುವ ಹೆಚ್ಚುವರಿ (ಓವರ್ಲೋಡ್) ಟಾರ್ಕ್.
T dec ಬ್ರೇಕಿಂಗ್ ಟಾರ್ಕ್ (ಬ್ರೇಕಿಂಗ್ ಟಾರ್ಕ್), ಇದು ವೇಗದ ಉಲ್ಲೇಖ ಕಡಿಮೆಯಾದಾಗ ಸಂಭವಿಸುತ್ತದೆ.
n 1 ಮತ್ತು n 2 - f 1 ಮತ್ತು f 2 ಆವರ್ತನಗಳಲ್ಲಿ ತಿರುಗುವಿಕೆಯ ವೇಗ.
ಆವರ್ತನ ಪರಿವರ್ತಕವು ಅಲ್ಪಾವಧಿಯ ಓವರ್ಲೋಡ್ ಟಾರ್ಕ್ ಅನ್ನು ಅನುಮತಿಸಿದರೆ, ನಂತರ ವೇಗವರ್ಧನೆ ಮತ್ತು ವೇಗವರ್ಧನೆಯ ಟಾರ್ಕ್ಗಳು ವಿದ್ಯುತ್ ಮೋಟರ್ T ಯ ದರದ ಟಾರ್ಕ್ಗೆ ಸಮನಾಗಿ ಹೊಂದಿಸಲ್ಪಡುತ್ತವೆ. ಪ್ರಾಯೋಗಿಕವಾಗಿ, ವೇಗವರ್ಧನೆ ಮತ್ತು ಕುಸಿತದ ಸಮಯಗಳು ಸಾಮಾನ್ಯವಾಗಿ ಒಂದೇ ಆಗಿರುತ್ತವೆ.
ಲೆಕ್ಕಾಚಾರದ ಉದಾಹರಣೆ
J = 0.042 kgm 2, T fric = 0.05 x M N, n 1 = 500 rpm, n 2 = 1000 rpm, T N = 27 Nm
tacc = J x (n 2 – n 1)/ [(T ac - T fric) x 9.55] = 0.042 x (1000 - 500)/ [(27.0 - (0.05 x 27.0)) x 9.55] = 0.1 [s]
ಡೈನಾಮಿಕ್ ಬ್ರೇಕಿಂಗ್
ವೇಗದ ಉಲ್ಲೇಖ ಸಿಗ್ನಲ್ ಕಡಿಮೆಯಾದಾಗ, ವಿದ್ಯುತ್ ಮೋಟರ್ ಜನರೇಟರ್ ಮತ್ತು ಬ್ರೇಕ್ ಆಗಿ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತದೆ. ಬ್ರೇಕಿಂಗ್ ಸಮಯದಲ್ಲಿ ಕುಸಿತವು ಎಲೆಕ್ಟ್ರಿಕ್ ಮೋಟರ್ನಲ್ಲಿನ ಲೋಡ್ ಅನ್ನು ಅವಲಂಬಿಸಿರುತ್ತದೆ.
ಗ್ರಿಡ್ಗೆ ನೇರವಾಗಿ ಸಂಪರ್ಕಗೊಂಡಿರುವ ಎಲೆಕ್ಟ್ರಿಕ್ ಮೋಟಾರ್ಗಳು ಬ್ರೇಕಿಂಗ್ ಶಕ್ತಿಯನ್ನು ಗ್ರಿಡ್ಗೆ ಹಿಂತಿರುಗಿಸುತ್ತದೆ.
ಮೋಟಾರ್ ಅನ್ನು ಆವರ್ತನ ಪರಿವರ್ತಕದಿಂದ ನಡೆಸಿದರೆ, ಬ್ರೇಕಿಂಗ್ ಶಕ್ತಿಯನ್ನು ಆವರ್ತನ ಪರಿವರ್ತಕದ ಮಧ್ಯಂತರ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿ ಸಂಗ್ರಹಿಸಲಾಗುತ್ತದೆ. ಬ್ರೇಕಿಂಗ್ ಸಮಯದಲ್ಲಿ ಬಿಡುಗಡೆಯಾದ ಶಕ್ತಿಯು ದೊಡ್ಡದಾಗಿದ್ದರೆ ಮತ್ತು ಆವರ್ತನ ಪರಿವರ್ತಕವು ಅದರ ವಿನ್ಯಾಸದಿಂದಾಗಿ ಅದನ್ನು ಹೊರಹಾಕಲು ಸಾಧ್ಯವಾಗದಿದ್ದರೆ, ಮಧ್ಯಂತರ ಸರ್ಕ್ಯೂಟ್ ವೋಲ್ಟೇಜ್ ಹೆಚ್ಚಾಗುತ್ತದೆ.
ಫ್ರೀಕ್ವೆನ್ಸಿ ಪರಿವರ್ತಕವು ರಕ್ಷಣೆಯ ವಿಧಾನದಿಂದ ಸ್ವಿಚ್ ಆಫ್ ಆಗುವವರೆಗೆ ಮಧ್ಯಂತರ ಸರ್ಕ್ಯೂಟ್ ವೋಲ್ಟೇಜ್ ಏರಬಹುದು, ಮತ್ತು ಕೆಲವೊಮ್ಮೆ ಬ್ರೇಕಿಂಗ್ ಘಟಕದ ರೂಪದಲ್ಲಿ ಲೋಡ್ ಮತ್ತು ಬ್ರೇಕಿಂಗ್ ಶಕ್ತಿಯನ್ನು ಹೀರಿಕೊಳ್ಳಲು ಬಾಹ್ಯ ರೆಸಿಸ್ಟರ್ ಅನ್ನು ಮಧ್ಯಂತರ ಸರ್ಕ್ಯೂಟ್ಗೆ ಸಂಪರ್ಕಿಸಬೇಕು.?
ಬ್ರೇಕಿಂಗ್ ಮಾಡ್ಯೂಲ್ ಮತ್ತು ಬ್ರೇಕಿಂಗ್ ರೆಸಿಸ್ಟರ್ನ ಬಳಕೆಯು ಭಾರವಾದ ಹೊರೆಗಳ ಅಡಿಯಲ್ಲಿ ವೇಗವಾಗಿ ಬ್ರೇಕ್ ಮಾಡಲು ಅನುಮತಿಸುತ್ತದೆ. ಆದಾಗ್ಯೂ, ತಾಪನಕ್ಕೆ ಸಂಬಂಧಿಸಿದ ಸಮಸ್ಯೆಗಳಿವೆ. ಪುನರುತ್ಪಾದಕ ಬ್ರೇಕಿಂಗ್ ಘಟಕವನ್ನು ಬಳಸುವುದು ಮತ್ತೊಂದು ಪರಿಹಾರವಾಗಿದೆ. ಅಂತಹ ಘಟಕಗಳನ್ನು ಅನಿಯಂತ್ರಿತ ರಿಕ್ಟಿಫೈಯರ್ನೊಂದಿಗೆ ಆವರ್ತನ ಪರಿವರ್ತಕಗಳಿಗೆ ಬಳಸಲಾಗುತ್ತದೆ ಮತ್ತು ಸರಬರಾಜು ನೆಟ್ವರ್ಕ್ಗೆ ಬ್ರೇಕಿಂಗ್ ಶಕ್ತಿಯನ್ನು ಹಿಂತಿರುಗಿಸುತ್ತದೆ.
ನಿಯಂತ್ರಿತ ರಿಕ್ಟಿಫೈಯರ್ಗಳೊಂದಿಗೆ ಆವರ್ತನ ಪರಿವರ್ತಕಗಳಲ್ಲಿ, ಬ್ರೇಕಿಂಗ್ ಪವರ್ ಅನ್ನು ನೆಟ್ವರ್ಕ್ಗೆ ಹಿಂತಿರುಗಿಸಬಹುದು (ಚಿತ್ರ 13 ನೋಡಿ) ಉದಾಹರಣೆಗೆ, ರಿಕ್ಟಿಫೈಯರ್ಗೆ ಬ್ಯಾಕ್-ಟು-ಬ್ಯಾಕ್ ಸಂಪರ್ಕಪಡಿಸಿದ ಇನ್ವರ್ಟರ್.

ಅಕ್ಕಿ. 13. ಬ್ರೇಕಿಂಗ್ ಮಾಡ್ಯೂಲ್ ಮತ್ತು ಬ್ರೇಕಿಂಗ್ ರೆಸಿಸ್ಟರ್ ಅನ್ನು ಬದಲಾಯಿಸುವುದು

ಅಕ್ಕಿ. 14. ಬ್ಯಾಕ್-ಟು-ಬ್ಯಾಕ್ ಇನ್ವರ್ಟರ್
ಎಲೆಕ್ಟ್ರಿಕ್ ಮೋಟರ್ ಅನ್ನು ಬ್ರೇಕ್ ಮಾಡುವ ಇನ್ನೊಂದು ವಿಧಾನವೆಂದರೆ ಡಿಸಿ ಬ್ರೇಕಿಂಗ್. ಸ್ಟೇಟರ್ನಲ್ಲಿ ಕಾಂತೀಯ ಕ್ಷೇತ್ರವನ್ನು ರಚಿಸಲು, ವಿದ್ಯುತ್ ಮೋಟರ್ನ ಎರಡು ಹಂತಗಳ ನಡುವೆ ನೇರ ವಿದ್ಯುತ್ ವೋಲ್ಟೇಜ್ ಅನ್ನು ಅನ್ವಯಿಸಲಾಗುತ್ತದೆ. ಬ್ರೇಕಿಂಗ್ ಶಕ್ತಿಯು ಮೋಟಾರಿನಲ್ಲಿ ಉಳಿಯುತ್ತದೆ ಮತ್ತು ಅಧಿಕ ತಾಪವು ಸಾಧ್ಯವಿರುವುದರಿಂದ, ರೇಟ್ ಮಾಡಲಾದ ಮೋಟಾರು ಪ್ರವಾಹವನ್ನು ಮೀರುವುದನ್ನು ತಪ್ಪಿಸಲು ಕಡಿಮೆ ವೇಗದ ವ್ಯಾಪ್ತಿಯಲ್ಲಿ DC ಬ್ರೇಕಿಂಗ್ ಅನ್ನು ಶಿಫಾರಸು ಮಾಡಲಾಗುತ್ತದೆ. ಸಾಮಾನ್ಯವಾಗಿ DC ಬ್ರೇಕಿಂಗ್ ಸಮಯಕ್ಕೆ ಸೀಮಿತವಾಗಿದೆ.?
ಹಿಮ್ಮುಖ
ಅಸಮಕಾಲಿಕ ವಿದ್ಯುತ್ ಮೋಟರ್ಗಳ ತಿರುಗುವಿಕೆಯ ದಿಕ್ಕನ್ನು ಪೂರೈಕೆ ವೋಲ್ಟೇಜ್ ಹಂತಗಳ ಕ್ರಮದಿಂದ ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ.
ಎರಡು ಹಂತಗಳನ್ನು ಬದಲಾಯಿಸಿದರೆ, ಮೋಟಾರಿನ ತಿರುಗುವಿಕೆಯ ದಿಕ್ಕು ಬದಲಾಗುತ್ತದೆ ಮತ್ತು ಅದು ವಿರುದ್ಧ ದಿಕ್ಕಿನಲ್ಲಿ ತಿರುಗುತ್ತದೆ.
ಹೆಚ್ಚಿನ ಎಲೆಕ್ಟ್ರಿಕ್ ಮೋಟರ್ಗಳನ್ನು ಈ ಕೆಳಗಿನಂತೆ ಸಂಪರ್ಕಿಸಿದರೆ ಮೋಟಾರು ಶಾಫ್ಟ್ ಅನ್ನು ಪ್ರದಕ್ಷಿಣಾಕಾರವಾಗಿ ತಿರುಗಿಸಲು ವಿನ್ಯಾಸಗೊಳಿಸಲಾಗಿದೆ:

ಅಕ್ಕಿ. 15. ಹಂತಗಳ ಕ್ರಮವನ್ನು ಬದಲಾಯಿಸುವ ಮೂಲಕ ವಿದ್ಯುತ್ ಮೋಟರ್ನ ತಿರುಗುವಿಕೆಯ ದಿಕ್ಕನ್ನು ಬದಲಾಯಿಸಲಾಗುತ್ತದೆ
ಅದೇ ನಿಯಮವು ಹೆಚ್ಚಿನ ಆವರ್ತನ ಪರಿವರ್ತಕಗಳ ಔಟ್ಪುಟ್ ಟರ್ಮಿನಲ್ಗಳಲ್ಲಿ ಹಂತಗಳ ಕ್ರಮಕ್ಕೆ ಅನುರೂಪವಾಗಿದೆ.
ಎಲೆಕ್ಟ್ರಾನಿಕ್ಸ್ ಬಳಸಿ ಹಂತದ ಕ್ರಮವನ್ನು ಬದಲಾಯಿಸುವ ಮೂಲಕ ಆವರ್ತನ ಪರಿವರ್ತಕವು ಮೋಟಾರ್ ಅನ್ನು ಹಿಮ್ಮುಖಗೊಳಿಸಬಹುದು. ಋಣಾತ್ಮಕ ವೇಗವನ್ನು ಹೊಂದಿಸುವ ಮೂಲಕ ಅಥವಾ ಡಿಜಿಟಲ್ ಇನ್ಪುಟ್ ಸಿಗ್ನಲ್ ಮೂಲಕ ಹಿಮ್ಮುಖಗೊಳಿಸುವಿಕೆಯನ್ನು ಮಾಡಲಾಗುತ್ತದೆ. ಆರಂಭಿಕ ಕಾರ್ಯಾರಂಭದ ಸಮಯದಲ್ಲಿ ಮೋಟಾರ್ ತಿರುಗುವಿಕೆಯ ನಿರ್ದಿಷ್ಟ ದಿಕ್ಕನ್ನು ಹೊಂದಲು ಅಗತ್ಯವಿದ್ದರೆ, ಆವರ್ತನ ಪರಿವರ್ತಕದ ಫ್ಯಾಕ್ಟರಿ ಡೀಫಾಲ್ಟ್ ಸೆಟ್ಟಿಂಗ್ ತಿಳಿದಿರಬೇಕು.
ಆವರ್ತನ ಪರಿವರ್ತಕವು ಮೋಟಾರು ಪ್ರವಾಹವನ್ನು ಅದರ ದರದ ಮೌಲ್ಯಕ್ಕೆ ಮಿತಿಗೊಳಿಸುವುದರಿಂದ, ಆವರ್ತನ ಪರಿವರ್ತಕದಿಂದ ನಿಯಂತ್ರಿಸಲ್ಪಡುವ ಮೋಟರ್ ಅನ್ನು ನೇರವಾಗಿ ಲೈನ್ಗೆ ಸಂಪರ್ಕಿಸಲಾದ ಮೋಟರ್ಗಿಂತ ಹೆಚ್ಚಾಗಿ ಹಿಂತಿರುಗಿಸಬಹುದು.

ಅಕ್ಕಿ. 16. ರಿವರ್ಸ್ ಸಮಯದಲ್ಲಿ ಆವರ್ತನ ಪರಿವರ್ತಕದ ಬ್ರೇಕಿಂಗ್ ಟಾರ್ಕ್
ಇಳಿಜಾರುಗಳು
ಎಲ್ಲಾ ಆವರ್ತನ ಪರಿವರ್ತಕಗಳು ಸುಗಮ ಕಾರ್ಯಾಚರಣೆಯನ್ನು ಖಚಿತಪಡಿಸಿಕೊಳ್ಳಲು ವೇರಿಯಬಲ್ ವೇಗ (ರಾಂಪ್) ಕಾರ್ಯಗಳನ್ನು ಹೊಂದಿವೆ. ಈ ಇಳಿಜಾರುಗಳನ್ನು ಬದಲಾಯಿಸಬಹುದು, ಮತ್ತು ಅವರಿಗೆ ಧನ್ಯವಾದಗಳು ನಿರ್ದಿಷ್ಟ ಮಧ್ಯಂತರದಲ್ಲಿ ವೇಗದ ಉಲ್ಲೇಖವನ್ನು ಹೆಚ್ಚಿಸಬಹುದು ಅಥವಾ ಕಡಿಮೆ ಮಾಡಬಹುದು.

ಅಕ್ಕಿ. 17.ಹೊಂದಾಣಿಕೆ ವೇಗವರ್ಧನೆ ಮತ್ತು ನಿಧಾನಗೊಳಿಸುವ ಸಮಯ
ವೇಗೋತ್ಕರ್ಷ/ಕ್ಷೀಣತೆಯ ವಿಶಿಷ್ಟತೆಯ (ವೇಗವರ್ಧನೆ/ಕ್ಷೀಣತೆಯ ಅವಧಿ) ಇಳಿಜಾರಿನ ಕೋನವನ್ನು ತುಂಬಾ ಚಿಕ್ಕದಾಗಿ ಹೊಂದಿಸಬಹುದು, ಕೆಲವು ಸಂದರ್ಭಗಳಲ್ಲಿ ಎಲೆಕ್ಟ್ರಿಕ್ ಮೋಟಾರು ಕಾರ್ಯವನ್ನು ಪೂರ್ಣಗೊಳಿಸಲು ಸಾಧ್ಯವಾಗುವುದಿಲ್ಲ (ಇದು ನಿರ್ದಿಷ್ಟಪಡಿಸಿದ ಒಳಗೆ ಎಂಜಿನ್ ಅನ್ನು ವೇಗಗೊಳಿಸಲು/ಕಡಿಮೆಗೊಳಿಸಲು ಸಾಧ್ಯವಾಗುವುದಿಲ್ಲ. ಸಮಯ).
ಇದು ಪ್ರಸ್ತುತ ಮಿತಿಯನ್ನು ತಲುಪುವವರೆಗೆ ಮೋಟಾರ್ ಪ್ರವಾಹವನ್ನು ಹೆಚ್ಚಿಸುತ್ತದೆ. ಕುಸಿತದ ಸಮಯ (t -a) ಚಿಕ್ಕದಾಗಿದ್ದರೆ, ಇಂಟರ್ಮೀಡಿಯೇಟ್ ಸರ್ಕ್ಯೂಟ್ ವೋಲ್ಟೇಜ್ ಅಂತಹ ಮಟ್ಟಕ್ಕೆ ಏರಬಹುದು, ಆವರ್ತನ ಪರಿವರ್ತಕ ರಕ್ಷಣೆ ಸರ್ಕ್ಯೂಟ್ ಪರಿವರ್ತಕವನ್ನು ನಿಲ್ಲಿಸುತ್ತದೆ.
ಕೆಳಗಿನ ಸೂತ್ರಗಳನ್ನು ಬಳಸಿಕೊಂಡು ಸೂಕ್ತವಾದ ವೇಗ ಬದಲಾವಣೆ ಸಮಯವನ್ನು ಲೆಕ್ಕಹಾಕಬಹುದು.
t a = J x n/[(T N -T fric)x9.55]
t -a = J x n/[(T N +T fric)x9.55]
t a - ವೇಗ ಹೆಚ್ಚಳ ಸಮಯ
t-a - ವೇಗ ಕಡಿತ ಸಮಯ
n - ಕ್ರಾಂತಿಗಳ ಸಂಖ್ಯೆ
ಟಿ ಎನ್ - ವಿದ್ಯುತ್ ಮೋಟರ್ನ ರೇಟ್ ಟಾರ್ಕ್
ಟಿ ಫ್ರಿಕ್ - ಘರ್ಷಣೆ ಕ್ಷಣ

ಅಕ್ಕಿ. 18. ವೇಗ ಬದಲಾವಣೆಯ ಸಮಯವನ್ನು ಹೊಂದಿಸುವುದು
ವೇಗವರ್ಧನೆ/ಕ್ಷೀಣತೆ ಸಮಯವನ್ನು ಸಾಮಾನ್ಯವಾಗಿ ಮೋಟಾರಿನ ದರದ ವೇಗವನ್ನು ಆಧರಿಸಿ ಆಯ್ಕೆಮಾಡಲಾಗುತ್ತದೆ.
ಪ್ರಸ್ತುತ ನಿಯಂತ್ರಣ
ಆವರ್ತನ ಪರಿವರ್ತಕಗಳು ನಿಯಂತ್ರಿತ ಪ್ರಕ್ರಿಯೆಯನ್ನು ಮೇಲ್ವಿಚಾರಣೆ ಮಾಡಬಹುದು ಮತ್ತು ದೋಷದ ಸಂದರ್ಭದಲ್ಲಿ ಮಧ್ಯಪ್ರವೇಶಿಸಬಹುದು.
ಅಂತಹ ಮೇಲ್ವಿಚಾರಣೆಯನ್ನು ವಸ್ತುವಿನ ಆಧಾರದ ಮೇಲೆ ಮೂರು ವಿಧಗಳಾಗಿ ವಿಂಗಡಿಸಬಹುದು: ಪ್ರಕ್ರಿಯೆ ಸಸ್ಯ ಮೇಲ್ವಿಚಾರಣೆ, ವಿದ್ಯುತ್ ಮೋಟರ್ ಮೇಲ್ವಿಚಾರಣೆ ಮತ್ತು ಆವರ್ತನ ಪರಿವರ್ತಕ ಮೇಲ್ವಿಚಾರಣೆ.
ಅನುಸ್ಥಾಪನ ನಿಯಂತ್ರಣಔಟ್ಪುಟ್ ಆವರ್ತನ, ಔಟ್ಪುಟ್ ಕರೆಂಟ್ ಮತ್ತು ಎಲೆಕ್ಟ್ರಿಕ್ ಮೋಟರ್ನ ಟಾರ್ಕ್ ಅನ್ನು ಮೇಲ್ವಿಚಾರಣೆ ಮಾಡುವ ಆಧಾರದ ಮೇಲೆ. ಈ ನಿಯತಾಂಕಗಳ ಆಧಾರದ ಮೇಲೆ, ಹಲವಾರು ಮಿತಿಗಳನ್ನು ಹೊಂದಿಸಬಹುದು, ಅದರ ಮೀರುವಿಕೆಯು ನಿಯಂತ್ರಣ ಕಾರ್ಯದ ಮೇಲೆ ಪರಿಣಾಮ ಬೀರುತ್ತದೆ. ಈ ಮಿತಿಗಳು ಅನುಮತಿಸಲಾದ ಕಡಿಮೆ ಮೋಟಾರು ವೇಗ (ಕನಿಷ್ಠ ಆವರ್ತನ), ಅನುಮತಿಸಲಾದ ಹೆಚ್ಚಿನ ಪ್ರವಾಹ (ಪ್ರಸ್ತುತ ಮಿತಿ) ಅಥವಾ ಅನುಮತಿಸಲಾದ ಹೆಚ್ಚಿನ ಮೋಟಾರ್ ಟಾರ್ಕ್ (ಟಾರ್ಕ್ ಮಿತಿ) ಆಗಿರಬಹುದು.
ಆವರ್ತನ ಪರಿವರ್ತಕವನ್ನು ಪ್ರೋಗ್ರಾಮ್ ಮಾಡಬಹುದು, ಉದಾಹರಣೆಗೆ, ಎಚ್ಚರಿಕೆಯ ಸಂಕೇತವನ್ನು ನೀಡಲು, ವಿದ್ಯುತ್ ಮೋಟರ್ನ ವೇಗವನ್ನು ಕಡಿಮೆ ಮಾಡಿ ಅಥವಾ ಅದರ ವೇಗವು ನಿಗದಿತ ಮಿತಿಗಳನ್ನು ಮೀರಿದರೆ ಮೋಟಾರ್ ಅನ್ನು ನಿಲ್ಲಿಸಿ.
ಉದಾಹರಣೆ
ಸಿಸ್ಟಮ್ನ ಉಳಿದ ಭಾಗಕ್ಕೆ ಮೋಟಾರ್ ಅನ್ನು ಸಂಪರ್ಕಿಸಲು ವಿ-ಬೆಲ್ಟ್ ಅನ್ನು ಬಳಸುವ ಅನುಸ್ಥಾಪನೆಗಳಲ್ಲಿ, ಈ ಬೆಲ್ಟ್ನ ಸ್ಥಿತಿಯನ್ನು ಮೇಲ್ವಿಚಾರಣೆ ಮಾಡಲು ಆವರ್ತನ ಪರಿವರ್ತಕವನ್ನು ಪ್ರೋಗ್ರಾಮ್ ಮಾಡಬಹುದು.
ಬೆಲ್ಟ್ ಬ್ರೇಕ್ನ ಸಂದರ್ಭದಲ್ಲಿ ಔಟ್ಪುಟ್ ಆವರ್ತನವು ಸೆಟ್ ರಾಂಪ್ಗಿಂತ ವೇಗವಾಗಿ ಹೆಚ್ಚಾಗುತ್ತದೆಯಾದ್ದರಿಂದ, ಅಂತಹ ಸಂದರ್ಭಗಳಲ್ಲಿ ಮೋಟಾರ್ ಅನ್ನು ಎಚ್ಚರಿಸಲು ಅಥವಾ ನಿಲ್ಲಿಸಲು ಈ ಆವರ್ತನವನ್ನು ಬಳಸಬಹುದು.
ಮೋಟಾರ್ ನಿಯಂತ್ರಣಮೋಟರ್ನ ಥರ್ಮಲ್ ಮಾದರಿಯನ್ನು ಮೇಲ್ವಿಚಾರಣೆ ಮಾಡುವ ಮೂಲಕ ಅಥವಾ ಮೋಟರ್ಗೆ ಥರ್ಮಿಸ್ಟರ್ ಅನ್ನು ಸಂಪರ್ಕಿಸುವ ಮೂಲಕ ಆವರ್ತನ ಪರಿವರ್ತಕವನ್ನು ಬಳಸಿ ಮಾಡಬಹುದು. ಆವರ್ತನ ಪರಿವರ್ತಕವು ಥರ್ಮಲ್ ರಿಲೇಯಂತೆ ಕಾರ್ಯನಿರ್ವಹಿಸುವ ಮೂಲಕ ಮೋಟಾರ್ ಓವರ್ಲೋಡ್ ಅನ್ನು ತಡೆಯಬಹುದು. ಆವರ್ತನ ಪರಿವರ್ತಕದಿಂದ ನಿರ್ವಹಿಸಲಾದ ಲೆಕ್ಕಾಚಾರಗಳಲ್ಲಿ ಔಟ್ಪುಟ್ ಆವರ್ತನವು ಸಹ ಭಾಗವಹಿಸುತ್ತದೆ. ಕಳಪೆ ಆಂತರಿಕ ವಾತಾಯನದಿಂದಾಗಿ ಮೋಟಾರ್ ಕಡಿಮೆ ವೇಗದಲ್ಲಿ ಓವರ್ಲೋಡ್ ಆಗುವುದಿಲ್ಲ ಎಂದು ಇದು ಖಚಿತಪಡಿಸುತ್ತದೆ. ಆಧುನಿಕ ಆವರ್ತನ ಪರಿವರ್ತಕಗಳು ವಿದ್ಯುತ್ ಪ್ರವಾಹವು ತುಂಬಾ ಹೆಚ್ಚಾದರೆ ಬಲವಂತದ-ಗಾಳಿಯ ಮೋಟರ್ಗಳನ್ನು ರಕ್ಷಿಸುವ ಸಾಮರ್ಥ್ಯವನ್ನು ಹೊಂದಿವೆ.
ಆವರ್ತನ ಪರಿವರ್ತಕ ಮೇಲ್ವಿಚಾರಣೆಸಾಂಪ್ರದಾಯಿಕವಾಗಿ ಅಧಿಕ ಪ್ರವಾಹದ ಸಂದರ್ಭದಲ್ಲಿ, ಪರಿವರ್ತಕವು ಸ್ವಿಚ್ ಆಫ್ ಆಗುವ ರೀತಿಯಲ್ಲಿ ಉತ್ಪಾದಿಸಲಾಗುತ್ತದೆ. ಕೆಲವು ಪರಿವರ್ತಕಗಳು ಅಲ್ಪಾವಧಿಯ ಮಿತಿಮೀರಿದ ಪ್ರವಾಹವನ್ನು ಅನುಮತಿಸುತ್ತವೆ. ಆವರ್ತನ ಪರಿವರ್ತಕದಲ್ಲಿನ ಮೈಕ್ರೊಪ್ರೊಸೆಸರ್ ಏಕಕಾಲದಲ್ಲಿ ಮೋಟಾರು ಪ್ರವಾಹದ ಮೌಲ್ಯ ಮತ್ತು ಅದರ ಅನ್ವಯದ ಸಮಯವನ್ನು ಗಣನೆಗೆ ತೆಗೆದುಕೊಳ್ಳಲು ಸಾಧ್ಯವಾಗುತ್ತದೆ, ಇದು ಆವರ್ತನ ಪರಿವರ್ತಕವನ್ನು ಓವರ್ಲೋಡ್ ಮಾಡದೆಯೇ ಅತ್ಯುತ್ತಮವಾಗಿ ಬಳಸಬಹುದೆಂದು ಖಚಿತಪಡಿಸುತ್ತದೆ.
ಡ್ಯಾನ್ಫಾಸ್ನ ವಸ್ತುಗಳನ್ನು ಆಧರಿಸಿದೆ
ಆವರ್ತನ ಪರಿವರ್ತಕಗಳು ಎಂಜಿನ್ ವೇಗವನ್ನು ಬದಲಾಯಿಸಲು ಮತ್ತು ಅದರ ಕಾರ್ಯಾಚರಣೆಯನ್ನು ಸುಗಮಗೊಳಿಸಲು ಸುಲಭಗೊಳಿಸುತ್ತದೆ. ಇದು ಉಪಕರಣದ ದಕ್ಷತೆಯನ್ನು ಹೆಚ್ಚಿಸುತ್ತದೆ ಮತ್ತು ಅದರ ಸೇವಾ ಜೀವನವನ್ನು ವಿಸ್ತರಿಸುತ್ತದೆ.
ಆವರ್ತನ ಪರಿವರ್ತಕಗಳು ಯಾವುವು
ಆವರ್ತನ ಪರಿವರ್ತಕಗಳು ಔಟ್ಪುಟ್ ವೋಲ್ಟೇಜ್ನ ಆವರ್ತನವನ್ನು ಬದಲಾಯಿಸಲು ನಿಮಗೆ ಅನುಮತಿಸುವ ಸಾಧನಗಳಾಗಿವೆ. ಎಂಜಿನ್ ವೇಗವನ್ನು ಬದಲಿಸಲು ಇದು ಅವಶ್ಯಕವಾಗಿದೆ.
ಮುಖ್ಯಕ್ಕೆ ನೇರವಾಗಿ ಸಂಪರ್ಕಿಸಿದಾಗ, ಆಂದೋಲನ ಆವರ್ತನವು ಬದಲಾಗದೆ ಉಳಿಯುತ್ತದೆ, ಪ್ರಮಾಣಿತ ಮೌಲ್ಯಗಳು 50 ಅಥವಾ 60 Hz. ಆವರ್ತನ ಪರಿವರ್ತಕವನ್ನು ಬಳಸುವುದರಿಂದ ರೋಟರ್ ತಿರುಗುವಿಕೆಯನ್ನು ಹೆಚ್ಚಿಸಲು ಅಥವಾ ಕಡಿಮೆ ಮಾಡಲು ನಿಮಗೆ ಅನುಮತಿಸುತ್ತದೆ. ಸಂಭವನೀಯ ಬದಲಾವಣೆಗಳ ವ್ಯಾಪ್ತಿಯು 0.5-800 Hz ನಿಂದ. ಆದಾಗ್ಯೂ, ಈಗ ಹೆಚ್ಚಿನ ಮೋಟಾರ್ಗಳನ್ನು 400 Hz ಗಿಂತ ಹೆಚ್ಚಿನ ಆವರ್ತನಕ್ಕಾಗಿ ವಿನ್ಯಾಸಗೊಳಿಸಲಾಗಿದೆ.
ಪರಿವರ್ತಕಗಳ ಮುಖ್ಯ ಲಕ್ಷಣಗಳು
ಆಧುನಿಕ ವಿದ್ಯುತ್ ಉಪಕರಣಗಳು ಪ್ರೋಗ್ರಾಂ ನಿಯಂತ್ರಣದೊಂದಿಗೆ ಹೈಟೆಕ್ ಸಾಧನಗಳಾಗಿವೆ. ಎಲೆಕ್ಟ್ರಾನಿಕ್ ನಿಯಂತ್ರಣ ವ್ಯವಸ್ಥೆಯು ನಿಖರತೆ ಮತ್ತು ವಿಶ್ವಾಸಾರ್ಹತೆಗೆ ಕಾರಣವಾಗಿದೆ. ಘಟಕಗಳು ಸಾಕಷ್ಟು ಕಾಂಪ್ಯಾಕ್ಟ್ ಮತ್ತು ಕಾರ್ಯನಿರ್ವಹಿಸಲು ಸುಲಭ.
ಔಟ್ಪುಟ್ ವೋಲ್ಟೇಜ್ ಅನ್ನು ಸರಿಹೊಂದಿಸಬಹುದೇ ಎಂಬುದರ ಆಧಾರದ ಮೇಲೆ, ಪರಿವರ್ತಕಗಳನ್ನು ನಿಯಂತ್ರಿತ ಮತ್ತು ಅನಿಯಂತ್ರಿತವಾಗಿ ವಿಂಗಡಿಸಲಾಗಿದೆ. ಮೊದಲನೆಯದರಲ್ಲಿ, ನಿಯತಾಂಕಗಳನ್ನು ಬದಲಾಯಿಸಬಹುದು, ಎರಡನೆಯದರಲ್ಲಿ, ಘಟಕದ ವಿನ್ಯಾಸದಿಂದ ಸೂಚಕಗಳನ್ನು ಹೊಂದಿಸಲಾಗಿದೆ. ಸಂಪರ್ಕಿತ ಮೋಟಾರಿನ ನಿಯತಾಂಕಗಳಿಗೆ ಸ್ವಯಂಚಾಲಿತ ಟ್ಯೂನಿಂಗ್ ನಡೆಯುವ ಮಾದರಿಗಳು ಸಹ ಇವೆ. ಇದನ್ನು ಮಾಡಲು, ನೀವು ಗುರುತಿನ ಪ್ರಾರಂಭವನ್ನು ನಿರ್ವಹಿಸಬೇಕಾಗಿದೆ, ಈ ಸಮಯದಲ್ಲಿ ಅಂಕುಡೊಂಕಾದ ನಿಯತಾಂಕಗಳನ್ನು ಸ್ವಯಂಚಾಲಿತವಾಗಿ ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ.
ಸೂಚಕಗಳನ್ನು ಸರಿಹೊಂದಿಸುವ ಸಾಮರ್ಥ್ಯದ ಜೊತೆಗೆ, ವಿವಿಧ ರೀತಿಯ ಸಾಧನ ನಿಯಂತ್ರಣಗಳಿವೆ. ಅವುಗಳಲ್ಲಿ ಎರಡು ಇವೆ: ಸ್ಕೇಲಾರ್ ಮತ್ತು ವೆಕ್ಟರ್. ಸ್ಕೇಲಾರ್ ನಿಖರವಾದ ಸೆಟ್ಟಿಂಗ್ಗಳನ್ನು ಹೊಂದಿಸಲು ಅವಕಾಶವನ್ನು ನೀಡುವುದಿಲ್ಲ; ಇದು ಇನ್ಪುಟ್ ಮತ್ತು ಔಟ್ಪುಟ್ನಲ್ಲಿ ಆವರ್ತನಗಳ ಅನುಪಾತವನ್ನು ಮಾತ್ರ ನಿರ್ಧರಿಸುತ್ತದೆ. ಇನ್ಪುಟ್ ಡೇಟಾ ಬದಲಾದಾಗ, ಅಂತಿಮ ನಿಯತಾಂಕಗಳು ಪ್ರಮಾಣಾನುಗುಣವಾಗಿ ಬದಲಾಗುತ್ತವೆ. ನಿರ್ದಿಷ್ಟ ಸನ್ನಿವೇಶದಲ್ಲಿ ನಿರ್ದಿಷ್ಟ ಎಂಜಿನ್ಗೆ ಅಗತ್ಯವಿರುವ ನಿಖರವಾದ ನಿಯತಾಂಕಗಳನ್ನು ಹೊಂದಿಸಲು ವೆಕ್ಟರ್ ನಿಯಂತ್ರಣವು ಸಾಧ್ಯವಾಗಿಸುತ್ತದೆ.
ಉಪಕರಣಗಳು ಹೆಚ್ಚು ನಿಖರವಾಗಿ ಕಾರ್ಯನಿರ್ವಹಿಸಲು ಮತ್ತು ಸುಲಭವಾಗಿ ನಿಯಂತ್ರಿಸಲು, ಆಧುನಿಕ ಉಪಕರಣಗಳು ಮೆಮೊರಿ ಕಾರ್ಡ್ಗಳು ಮತ್ತು ಮಾಹಿತಿಯನ್ನು ಪ್ರದರ್ಶಿಸಲು ಪ್ರದರ್ಶನದೊಂದಿಗೆ ಅಳವಡಿಸಲ್ಪಟ್ಟಿವೆ.
ಪರಿವರ್ತಕಗಳನ್ನು ಬಳಸುವಾಗ, ಕೆಲವು ಸೂಕ್ಷ್ಮ ವ್ಯತ್ಯಾಸಗಳನ್ನು ಗಣನೆಗೆ ತೆಗೆದುಕೊಳ್ಳುವುದು ಅವಶ್ಯಕ. ಹೀಗಾಗಿ, ಕಡಿಮೆ ವೇಗದಲ್ಲಿ ಎಂಜಿನ್ ಅನ್ನು ಚಾಲನೆ ಮಾಡುವುದು ತಾಪಮಾನದಲ್ಲಿ ಹೆಚ್ಚಳಕ್ಕೆ ಕಾರಣವಾಗುತ್ತದೆ, ಅಂತರ್ನಿರ್ಮಿತ ಫ್ಯಾನ್ ನಿಭಾಯಿಸಲು ಸಾಧ್ಯವಾಗುವುದಿಲ್ಲ. ಆದ್ದರಿಂದ, ತಾಪನವನ್ನು ಮೇಲ್ವಿಚಾರಣೆ ಮಾಡುವುದು ಅವಶ್ಯಕ ಮತ್ತು ಅಗತ್ಯವಿದ್ದರೆ, ಬಲವಂತದ ತಂಪಾಗಿಸುವಿಕೆಯನ್ನು ಬಳಸಿ.
ಅಲ್ಲದೆ, ಕೆಲಸ ಮಾಡುವ ಪರಿವರ್ತಕವು ಅಧಿಕ-ಆವರ್ತನ ಪ್ರವಾಹದ ಪ್ರಬಲ ಮೂಲವಾಗುತ್ತದೆ. ಉಪಕರಣದ ಸ್ವಂತ ಮೈಕ್ರೊ ಸರ್ಕ್ಯುಟ್ಗಳನ್ನು ವಿಶೇಷ ಫಿಲ್ಟರ್ಗಳಿಂದ ಹಸ್ತಕ್ಷೇಪದಿಂದ ರಕ್ಷಿಸಲಾಗಿದೆ. ಆದರೆ ಇತರ ಸಾಧನಗಳ ಕಾರ್ಯಾಚರಣೆಯ ಮೇಲೆ ಪರಿಣಾಮ ಬೀರದಂತೆ ಕಂಪನಗಳನ್ನು ತಡೆಗಟ್ಟಲು, ನೀವು ಸಾಧ್ಯವಾದಷ್ಟು ಕಡಿಮೆ ಉದ್ದದ ರಕ್ಷಾಕವಚ ಕೇಬಲ್ ಅನ್ನು ಬಳಸಬೇಕಾಗುತ್ತದೆ. ಇತರ ಕೇಬಲ್ಗಳಿಗೆ ಅಂತರವು ಕನಿಷ್ಟ 10 ಸೆಂ.ಮೀ ಆಗಿರಬೇಕು ದಾಟಲು ಅಗತ್ಯವಿದ್ದರೆ, ಇದನ್ನು 90 ° ಕೋನದಲ್ಲಿ ಮಾಡಬೇಕು.
ಆವರ್ತನ ಪರಿವರ್ತಕಗಳ ಅಪ್ಲಿಕೇಶನ್
ಆವರ್ತನ ಪರಿವರ್ತಕಗಳನ್ನು ಉಪಕರಣಗಳಿಗೆ ಸಂಪರ್ಕಿಸಲಾಗಿದೆ, ಅದರ ಕಾರ್ಯಾಚರಣೆಯು ಮೋಟರ್ನ ವೇಗವನ್ನು ಬದಲಾಯಿಸುವುದನ್ನು ಒಳಗೊಂಡಿರುತ್ತದೆ.
ಅಂತಹ ಕಾರ್ಯವಿಧಾನಗಳು ಸೇರಿವೆ:
-
ವಾತಾಯನ ವ್ಯವಸ್ಥೆಗಳು;
ಕನ್ವೇಯರ್ಗಳು;
ಸಂಕೋಚಕಗಳು;
ಮ್ಯಾನಿಪ್ಯುಲೇಟರ್ಗಳು ಮತ್ತು ಅಗೆಯುವ ಯಂತ್ರಗಳು;
-
ಕೇಂದ್ರಾಪಗಾಮಿಗಳು;
ರೊಬೊಟಿಕ್ಸ್, ಇತ್ಯಾದಿ.
ಅಲ್ಲದೆ, ಅಂತರ್ಸಂಪರ್ಕಿತ ಕಾರ್ಯವಿಧಾನಗಳ ಕಾರ್ಯಾಚರಣೆಯನ್ನು ಸಿಂಕ್ರೊನೈಸ್ ಮಾಡಲು ಆವರ್ತನ ಪರಿವರ್ತಕವನ್ನು ಬಳಸಲಾಗುತ್ತದೆ. ಅವಲಂಬನೆಯು ನೇರ ಮತ್ತು ವಿಲೋಮ ಎರಡೂ ಆಗಿರಬಹುದು.
ಕಾರ್ಯಾಚರಣೆಯ ತತ್ವ
ಪರಿವರ್ತಕದ ಮೂಲಕ ಹಾದುಹೋಗುವ ವೋಲ್ಟೇಜ್ ಅದರ ಗುಣಲಕ್ಷಣಗಳನ್ನು ಬದಲಾಯಿಸುತ್ತದೆ ಎಂದು ಖಚಿತಪಡಿಸಿಕೊಳ್ಳಲು, ಡಬಲ್ ಬದಲಾವಣೆಯ ತತ್ವವನ್ನು ಬಳಸಲಾಗುತ್ತದೆ. ಇನ್ಪುಟ್ನಲ್ಲಿ, ಡಯೋಡ್ ಸೇತುವೆಯನ್ನು ಬಳಸಿಕೊಂಡು ಮುಖ್ಯ ವೋಲ್ಟೇಜ್ ಅನ್ನು ಸರಿಪಡಿಸಲಾಗುತ್ತದೆ ಮತ್ತು ಕೆಪಾಸಿಟರ್ಗಳಿಂದ ಫಿಲ್ಟರ್ ಮಾಡಲಾಗುತ್ತದೆ. ಇಲ್ಲಿ ಆಂದೋಲನಗಳ ವೈಶಾಲ್ಯವನ್ನು ಸುಗಮಗೊಳಿಸಲಾಗುತ್ತದೆ, ಅದರ ನಂತರ ಪ್ರಸ್ತುತವು ಪರಿವರ್ತಿಸುವ ಭಾಗಕ್ಕೆ ಹರಿಯುತ್ತದೆ.
ಒಂದು ನಿರ್ದಿಷ್ಟ ರೀತಿಯಲ್ಲಿ ಸಂಯೋಜಿಸಲ್ಪಟ್ಟ ಟ್ರಾನ್ಸಿಸ್ಟರ್ಗಳಿಗೆ ಧನ್ಯವಾದಗಳು (ಸಾಮಾನ್ಯವಾಗಿ ಅವುಗಳಲ್ಲಿ 6 ಇವೆ) ಪರಿವರ್ತನೆ ಸಂಭವಿಸುತ್ತದೆ. ಅವುಗಳನ್ನು ಬ್ಯಾಕ್-ಟು-ಬ್ಯಾಕ್ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿ ಸಂಪರ್ಕಿಸಲಾಗಿದೆ. ಅವರ ಸಹಾಯದಿಂದ, ಪ್ರಸ್ತುತ ಆಂದೋಲನಗಳ ಆವರ್ತನ ಮತ್ತು ವೈಶಾಲ್ಯದ ಅಗತ್ಯ ಸೂಚಕಗಳನ್ನು ಹೊಂದಿಸಲಾಗಿದೆ.
ನಿಯಂತ್ರಣ ವ್ಯವಸ್ಥೆಯಲ್ಲಿ ಎರಡು ವಿಧಗಳಿವೆ:
ವೈಶಾಲ್ಯ, ಇನ್ಪುಟ್ ವೋಲ್ಟೇಜ್ ಸೂಚಕಗಳನ್ನು ನಿಯಂತ್ರಿಸಿದಾಗ;
ನಾಡಿ ಅಗಲ (PWM), ಇದರಲ್ಲಿ ಸೂಚಕಗಳಲ್ಲಿನ ಬದಲಾವಣೆಗಳು ಸ್ವಿಚಿಂಗ್ ಟ್ರಾನ್ಸಿಸ್ಟರ್ಗಳ ಕ್ರಮದಿಂದ ಪ್ರಭಾವಿತವಾಗಿರುತ್ತದೆ. ನಿರ್ದಿಷ್ಟ, ಕಟ್ಟುನಿಟ್ಟಾಗಿ ವ್ಯಾಖ್ಯಾನಿಸಲಾದ ಕ್ರಮದಲ್ಲಿ, ಸಿಗ್ನಲ್ ಧನಾತ್ಮಕ ಮತ್ತು ಋಣಾತ್ಮಕ ಟರ್ಮಿನಲ್ಗಳಿಗೆ ಆಗಮಿಸುತ್ತದೆ, ಇದು ಸ್ಪಷ್ಟವಾಗಿ ವ್ಯಾಖ್ಯಾನಿಸಲಾದ ನಿಯತಾಂಕಗಳೊಂದಿಗೆ ಸೈನುಸಾಯ್ಡ್ಗೆ ಕಾರಣವಾಗುತ್ತದೆ.
ಪ್ರಕ್ರಿಯೆಯು ನಿಯಂತ್ರಿಸಲ್ಪಡುತ್ತದೆ ಮತ್ತು ಮೈಕ್ರೊಪ್ರೊಸೆಸರ್ಗಳನ್ನು ಬಳಸಿಕೊಂಡು ನಿರ್ದಿಷ್ಟಪಡಿಸಿದ ಗುಣಲಕ್ಷಣಗಳನ್ನು ಬದಲಾಯಿಸಲಾಗುತ್ತದೆ. ವಿಶೇಷ ಮೈಕ್ರೊಕಂಟ್ರೋಲರ್ ಮೈಕ್ರೊ ಸರ್ಕ್ಯೂಟ್ಗೆ ಸಂಕೇತವನ್ನು ಕಳುಹಿಸುತ್ತದೆ. ಬದಲಾವಣೆಗಳನ್ನು ನಿರ್ದಿಷ್ಟ ಮಾನದಂಡದೊಂದಿಗೆ ಹೋಲಿಸಲಾಗುತ್ತದೆ (5 Hz). ಮುಂದೆ, ಪ್ರೋಗ್ರಾಂ, ವಿಶೇಷ ಅಲ್ಗಾರಿದಮ್ ಬಳಸಿ, ಪ್ರಸ್ತುತವನ್ನು ಅಗತ್ಯವಿರುವ ಮೌಲ್ಯಕ್ಕೆ ಪರಿವರ್ತಿಸುತ್ತದೆ. ಇದರ ಜೊತೆಗೆ, ಮೈಕ್ರೊಕಂಟ್ರೋಲರ್ ಅರೆವಾಹಕಗಳ ತಾಪಮಾನವನ್ನು ಮೇಲ್ವಿಚಾರಣೆ ಮಾಡುತ್ತದೆ, ಮಿತಿಮೀರಿದ ಮತ್ತು ಹಠಾತ್ ವೋಲ್ಟೇಜ್ ಉಲ್ಬಣಗಳಿಂದ ಸಾಧನವನ್ನು ರಕ್ಷಿಸುತ್ತದೆ.
ಬಾಹ್ಯ ಪ್ರಭಾವಗಳಿಂದ ಸೆಟ್ಟಿಂಗ್ಗಳನ್ನು ರಕ್ಷಿಸಲು, ಪ್ರಕರಣವನ್ನು ವಿಶ್ವಾಸಾರ್ಹವಾಗಿ ರಕ್ಷಿಸಲಾಗಿದೆ. ಯಾಂತ್ರಿಕ ಹಾನಿ (ಆಘಾತಗಳು, ಧೂಳು, ತೇವಾಂಶ) ಮಾತ್ರವಲ್ಲದೆ ಇತರ ಕಾರ್ಯಾಚರಣಾ ಸಾಧನಗಳಿಂದ ರಚಿಸಲಾದ ಪರಸ್ಪರ ಹಸ್ತಕ್ಷೇಪವನ್ನು ತಡೆಯುವುದು ಅವಶ್ಯಕ. ರೇಡಿಯೋ ಹಸ್ತಕ್ಷೇಪ ಮತ್ತು ಅದೃಶ್ಯ ವಿದ್ಯುತ್ ಹೊರಸೂಸುವಿಕೆಯನ್ನು ಕಡಿಮೆ ಮಾಡಲು, ವಿಶೇಷ ಫಿಲ್ಟರ್ ಅನ್ನು ಬಳಸಲಾಗುತ್ತದೆ.
ಪರಿಣಾಮವಾಗಿ, ಔಟ್ಪುಟ್ ಅಗತ್ಯವಾದ ಆವರ್ತನದ ಸ್ಪಷ್ಟ, ಸ್ಥಿರ ಸಂಕೇತವನ್ನು ಉತ್ಪಾದಿಸುತ್ತದೆ, ಇದು ವಿದ್ಯುತ್ ಮೋಟರ್ ಅನ್ನು ಚಾಲನೆ ಮಾಡುತ್ತದೆ ಮತ್ತು ಅಪೇಕ್ಷಿತ ವೇಗವನ್ನು ಹೊಂದಿಸುತ್ತದೆ.
ಆಯ್ಕೆಯ ಮಾನದಂಡಗಳು
ತಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳು ಮತ್ತು ಬೆಲೆಯಲ್ಲಿ ಭಿನ್ನವಾಗಿರುವ ಹೆಚ್ಚಿನ ಸಂಖ್ಯೆಯ ಮಾದರಿಗಳಿವೆ.
ಸರಿಯಾದ ಆಯ್ಕೆ ಮಾಡಲು, ನೀವು ಪರಿಗಣಿಸಬೇಕು:
ಶಕ್ತಿ. ಎಂಜಿನ್ ಸೇವಿಸುವ ಗರಿಷ್ಠ ಶಕ್ತಿಯ ಮೇಲೆ ನೀವು ಗಮನ ಹರಿಸಬೇಕು. ಈ ಸಂದರ್ಭದಲ್ಲಿ, ಘಟಕದ ಕಾರ್ಯಕ್ಷಮತೆಯು ಈ ಮೌಲ್ಯವನ್ನು ಸರಿಸುಮಾರು 10% ಮೀರಬೇಕು. ಇದು ಓವರ್ಲೋಡ್ನ ಅಪಾಯವನ್ನು ಕಡಿಮೆ ಮಾಡುತ್ತದೆ, ಏಕೆಂದರೆ ಗರಿಷ್ಠ ಕಾರ್ಯಕ್ಷಮತೆಯೊಂದಿಗೆ ಕಾರ್ಯನಿರ್ವಹಿಸುವಾಗ ಸಹ ಮೀಸಲು ವಿದ್ಯುತ್ ಮೀಸಲು ಇರುತ್ತದೆ. ಸಂಪರ್ಕಿತ ಉಪಕರಣಗಳು ಲೋಡ್ ಉಲ್ಬಣಗಳಿಂದ ನಿರೂಪಿಸಲ್ಪಟ್ಟಿದ್ದರೆ, ನೀವು ಗರಿಷ್ಠ ಸೂಚಕಗಳ ಮೇಲೆ ಕೇಂದ್ರೀಕರಿಸಬೇಕು. ಹಲವಾರು ಮೋಟಾರುಗಳನ್ನು ಪರಿವರ್ತಕಕ್ಕೆ ಸಂಪರ್ಕಿಸಿದಾಗ, ಅವುಗಳ ಒಟ್ಟು ಶಕ್ತಿಯನ್ನು ಲೆಕ್ಕಾಚಾರಕ್ಕಾಗಿ ಬಳಸಲಾಗುತ್ತದೆ;
ಮುಖ್ಯ ವೋಲ್ಟೇಜ್. ದೊಡ್ಡ ಶ್ರೇಣಿ, ಉತ್ತಮ. ಅದೇ ಸಮಯದಲ್ಲಿ, ನೆಟ್ವರ್ಕ್ನಲ್ಲಿನ ವೋಲ್ಟೇಜ್ನಲ್ಲಿನ ಇಳಿಕೆಯು ಸಾಧನವನ್ನು ಆಫ್ ಮಾಡಲು ಕಾರಣವಾದರೆ, ನಂತರ ಹೆಚ್ಚಿನ ವಾಚನಗೋಷ್ಠಿಗಳು ಪರಿವರ್ತಕ ವಿಫಲಗೊಳ್ಳಲು ಕಾರಣವಾಗಬಹುದು;
ಆವರ್ತನ ಹೊಂದಾಣಿಕೆ ಶ್ರೇಣಿ. ಮೇಲಿನ ಮಿತಿಯು ಸಂಪರ್ಕಿತ ಸಲಕರಣೆಗಳ ಗರಿಷ್ಠ ಆಪರೇಟಿಂಗ್ ಆವರ್ತನಕ್ಕೆ ಅನುರೂಪವಾಗಿದೆ. ಕಡಿಮೆ ಮಿತಿಯು ವೇಗ ನಿಯಂತ್ರಣ ಶ್ರೇಣಿಯನ್ನು ತೋರಿಸುತ್ತದೆ. ಪ್ರಮಾಣಿತ ಅನುಪಾತವು 1:10 ಆಗಿದೆ;
ಇನ್ಪುಟ್ ಹಂತಗಳ ಸಂಖ್ಯೆ (ಒಂದು ಅಥವಾ ಮೂರು). 380 ವೋಲ್ಟ್ಗಳ ಇನ್ಪುಟ್ ಶಕ್ತಿಯೊಂದಿಗೆ ಕೈಗಾರಿಕಾ ಉಪಕರಣಗಳಲ್ಲಿ ಮೂರು-ಹಂತದ ಮಾದರಿಗಳನ್ನು ಸ್ಥಾಪಿಸಲಾಗಿದೆ. 220 ವೋಲ್ಟ್ಗಳ ನೆಟ್ವರ್ಕ್ನಿಂದ ಚಾಲಿತವಾದಾಗ ಏಕ-ಹಂತದ ಪದಗಳಿಗಿಂತ ಮಾತ್ರ ಬಳಸಬಹುದಾಗಿದೆ. ವಿದ್ಯುತ್ ಮೋಟರ್ಗೆ ಸಂಪರ್ಕ ರೇಖಾಚಿತ್ರವು ಸಹ ಇದನ್ನು ಅವಲಂಬಿಸಿರುತ್ತದೆ;
ಅಪ್ಲಿಕೇಶನ್ ವ್ಯಾಪ್ತಿ: ಸಾಮಾನ್ಯ ಪರಿಸ್ಥಿತಿಗಳಲ್ಲಿ, ಪ್ರಮಾಣಿತ ವಸತಿ ರಕ್ಷಣೆ ಸಾಕಾಗುತ್ತದೆ. ಸಾಧನವನ್ನು ಬಳಸಬೇಕಾದರೆ, ಉದಾಹರಣೆಗೆ, ಗಣಿಗಾರಿಕೆ ಉದ್ಯಮದಲ್ಲಿ, ಹೆಚ್ಚಿನ ಮಟ್ಟದ ರಕ್ಷಣೆ ಅಗತ್ಯವಿರುತ್ತದೆ. ಈ ಗುಣಲಕ್ಷಣವನ್ನು ಐಪಿ ಗುರುತು ಮೂಲಕ ಗೊತ್ತುಪಡಿಸಲಾಗಿದೆ. ಹೆಚ್ಚಿನ ಸೂಚಕ, ಹೆಚ್ಚು ವಿಶ್ವಾಸಾರ್ಹವಾಗಿ ಉಪಕರಣವನ್ನು ರಕ್ಷಿಸಲಾಗಿದೆ;
ನಿಯಂತ್ರಣ ವಿಧಾನ. ವೆಕ್ಟರ್ ಮಾದರಿಯ ಘಟಕಗಳು ಹೆಚ್ಚು ದುಬಾರಿಯಾಗಿದೆ, ಆದರೆ ಹೆಚ್ಚು ನಿಖರವಾದ ಸೆಟ್ಟಿಂಗ್ಗಳನ್ನು ಅನುಮತಿಸುತ್ತದೆ. ಇನ್ಪುಟ್ ಮತ್ತು ಔಟ್ಪುಟ್ ಸೂಚಕಗಳ ನಡುವಿನ ಸಂಬಂಧವನ್ನು ನಿರ್ವಹಿಸಲು ಸ್ಕೇಲಾರ್ ನಿಯಂತ್ರಣವು ನಿಮಗೆ ಅನುಮತಿಸುತ್ತದೆ. ಆದಾಗ್ಯೂ, ಅಭಿಮಾನಿಗಳಂತಹ ಕೆಲವು ರೀತಿಯ ಸಲಕರಣೆಗಳಿಗೆ ಇದು ಸಾಕಷ್ಟು ಸಾಕು;
ಇನ್ಪುಟ್ ಮತ್ತು ಔಟ್ಪುಟ್ ಸಿಗ್ನಲ್ಗಳ ಸಂಖ್ಯೆ. ಅವರಿಗೆ ಧನ್ಯವಾದಗಳು, ಪರಿವರ್ತಕದ ನಿಯಂತ್ರಣ ಮತ್ತು ಸಂರಚನಾ ಸಾಮರ್ಥ್ಯಗಳನ್ನು ಹೆಚ್ಚಿಸಲಾಗಿದೆ. ಅವು ಡಿಸ್ಕ್ರೀಟ್, ಅನಲಾಗ್ ಮತ್ತು ಡಿಜಿಟಲ್. ಡಿಸ್ಕ್ರೀಟ್ ಇನ್ಪುಟ್ಗಳು ನಿಮಗೆ ನಿಯಂತ್ರಣ ಆಜ್ಞೆಗಳನ್ನು ನೀಡಲು ಅನುಮತಿಸುತ್ತದೆ (ಪ್ರಾರಂಭ, ನಿಲ್ಲಿಸಿ, ರಿವರ್ಸ್, ಇತ್ಯಾದಿ). ಕಾರ್ಯಾಚರಣೆಯ ಸಮಯದಲ್ಲಿ ಘಟಕವನ್ನು ನಿಯಂತ್ರಿಸಲು ಮತ್ತು ಕಾನ್ಫಿಗರ್ ಮಾಡಲು ಅನಲಾಗ್ ಇನ್ಪುಟ್ಗಳನ್ನು ಬಳಸಲಾಗುತ್ತದೆ. ಸಂವೇದಕಗಳಿಂದ ಸಂಕೇತಗಳನ್ನು ಇನ್ಪುಟ್ ಮಾಡಲು ಡಿಜಿಟಲ್ ಇನ್ಪುಟ್ಗಳನ್ನು ಬಳಸಲಾಗುತ್ತದೆ. ಡಿಸ್ಕ್ರೀಟ್ ಔಟ್ಪುಟ್ಗಳು ಸಾಧನದಿಂದ "ಪ್ರತಿಕ್ರಿಯೆ" ಅನ್ನು ಒದಗಿಸುತ್ತವೆ, ಅದರ ಕಾರ್ಯಾಚರಣೆಯಲ್ಲಿ ನಿರ್ಣಾಯಕ ಬದಲಾವಣೆಗಳನ್ನು ವರದಿ ಮಾಡುತ್ತವೆ (ದೋಷ, ಮಿತಿಮೀರಿದ, ತುಂಬಾ ಹೆಚ್ಚಿನ ವೋಲ್ಟೇಜ್, ಇತ್ಯಾದಿ.). ಸಂಕೀರ್ಣ ವ್ಯವಸ್ಥೆಗಳನ್ನು ನಿರ್ಮಿಸಲು ಅನಲಾಗ್ ಔಟ್ಪುಟ್ಗಳು ಅಗತ್ಯವಿದೆ. ಹೆಚ್ಚು ಇನ್ಪುಟ್ಗಳು ಮತ್ತು ಔಟ್ಪುಟ್ಗಳು, ಹೆಚ್ಚು ನಿಖರವಾದ ಸೆಟ್ಟಿಂಗ್ಗಳು ಮತ್ತು ಹೆಚ್ಚಿನ ಗುಣಮಟ್ಟದ ಪರಿವರ್ತನೆ. ಆದರೆ ಸಾಧನದ ತೊಡಕು ಅನಿವಾರ್ಯವಾಗಿ ಬೆಲೆಯ ಮೇಲೆ ಪರಿಣಾಮ ಬೀರುತ್ತದೆ;
ಪರಿವರ್ತಕ ಅಗತ್ಯವಿರುವ ಸಲಕರಣೆಗಳು. ನಿರ್ದಿಷ್ಟ ಸಲಕರಣೆಗಳಿಗಾಗಿ ವಿನ್ಯಾಸಗೊಳಿಸಲಾದ ಬ್ರಾಂಡ್ ಮಾದರಿಗಳಿವೆ. ಬಹುಪಯೋಗಿ ಬಳಕೆಗಾಗಿ ಸಾರ್ವತ್ರಿಕ ಘಟಕಗಳಿವೆ.
ವಾರಂಟಿ ಮತ್ತು ಸೇವಾ ನಿಯಮಗಳು. ಉನ್ನತ-ಗುಣಮಟ್ಟದ ಸೇವೆಯು ಪರಿವರ್ತಕದ ಕಾರ್ಯಕ್ಷಮತೆಯ ಬಗ್ಗೆ ಚಿಂತಿಸದಿರಲು ನಿಮಗೆ ಅನುಮತಿಸುತ್ತದೆ, ಜೊತೆಗೆ ಅದನ್ನು ಸಂಪರ್ಕಿಸಲಾದ ಉಪಕರಣಗಳು.
ಆವರ್ತನ ಪರಿವರ್ತಕಗಳ ಪ್ರಯೋಜನಗಳು
ಆವರ್ತನ ಪರಿವರ್ತಕದ ಬಳಕೆಯು ಅನೇಕ ಪ್ರಯೋಜನಗಳನ್ನು ಒದಗಿಸುತ್ತದೆ:
ಇಂಧನ ಉಳಿತಾಯ;
ಪ್ರಸ್ತುತ ಸೂಚಕಗಳಲ್ಲಿನ ಬದಲಾವಣೆಗಳಿಗೆ ಸಂಬಂಧಿಸಿದ ಸಮಸ್ಯೆಗಳಿಂದ ಮೋಟಾರ್ ರಕ್ಷಣೆ (ವೋಲ್ಟೇಜ್ ಉಲ್ಬಣಗಳು, ಶಾರ್ಟ್ ಸರ್ಕ್ಯೂಟ್ಗಳು, ನೆಟ್ವರ್ಕ್ ಓವರ್ಲೋಡ್ಗಳು, ಇತ್ಯಾದಿ);
ಎಂಜಿನ್ ವೇಗ ನಿಯಂತ್ರಣದ ನಿಖರತೆ ಹೆಚ್ಚಾಗುತ್ತದೆ;
ಪ್ರಾರಂಭ ಮತ್ತು ಬ್ರೇಕಿಂಗ್ ಸಮಯದಲ್ಲಿ ವೇಗ ವ್ಯತ್ಯಾಸಗಳನ್ನು ಸುಗಮಗೊಳಿಸಲಾಗುತ್ತದೆ;
ನೀವು ಕಾರ್ಯವಿಧಾನಗಳ ಗುಂಪನ್ನು ನಿಯಂತ್ರಿಸಬಹುದು;
ಸರಳ ನಿಯಂತ್ರಣ ವ್ಯವಸ್ಥೆ;
ಉಪಕರಣವು ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತಿರುವಾಗ ಸೆಟ್ಟಿಂಗ್ಗಳನ್ನು ಬದಲಾಯಿಸುವುದು, ಅದನ್ನು ನಿಲ್ಲಿಸದೆ;
ವಿದ್ಯುತ್ ಮೋಟರ್ನ ಕೆಲಸದ ಜೀವನವನ್ನು ಹೆಚ್ಚಿಸುವುದು.
ಇವೆಲ್ಲವೂ ಸಂಕೀರ್ಣ ಕಾರ್ಯವಿಧಾನಗಳ ನಿರ್ವಹಣೆಯನ್ನು ಸರಳಗೊಳಿಸುತ್ತದೆ, ದಕ್ಷತೆಯನ್ನು ಹೆಚ್ಚಿಸುತ್ತದೆ, ಸಲಕರಣೆಗಳ ಜೀವನವನ್ನು ವಿಸ್ತರಿಸುತ್ತದೆ ಮತ್ತು ಅಂತಿಮವಾಗಿ ಗಮನಾರ್ಹ ಬಜೆಟ್ ಉಳಿತಾಯವನ್ನು ಒದಗಿಸುತ್ತದೆ.
ಮೂರು-ಹಂತದ ಅಸಮಕಾಲಿಕ ವಿದ್ಯುತ್ ಮೋಟರ್ನ ರಚನೆಯು 19 ನೇ ಶತಮಾನದ ಕೊನೆಯಲ್ಲಿ ಸಂಭವಿಸಿತು. ಅಂದಿನಿಂದ, ಅದರ ಬಳಕೆಯಿಲ್ಲದೆ ಯಾವುದೇ ಕೈಗಾರಿಕಾ ಕೆಲಸ ಸಾಧ್ಯವಿಲ್ಲ. ಕೆಲಸದ ಪ್ರಕ್ರಿಯೆಯಲ್ಲಿ ಅತ್ಯಂತ ಮಹತ್ವದ ಕ್ಷಣವೆಂದರೆ ಎಂಜಿನ್ನ ನಯವಾದ ಪ್ರಾರಂಭ ಮತ್ತು ಬ್ರೇಕಿಂಗ್. ಆವರ್ತನ ಪರಿವರ್ತಕದ ಸಹಾಯದಿಂದ ಈ ಅಗತ್ಯವನ್ನು ಸಂಪೂರ್ಣವಾಗಿ ಪೂರೈಸಲಾಗುತ್ತದೆ.
ಮೂರು-ಹಂತದ ವಿದ್ಯುತ್ ಮೋಟರ್ಗಾಗಿ ಆವರ್ತನ ಜನರೇಟರ್ನ ಹೆಸರುಗಳಿಗೆ ಹಲವಾರು ಆಯ್ಕೆಗಳಿವೆ. ನಿರ್ದಿಷ್ಟವಾಗಿ, ಇದನ್ನು ಕರೆಯಬಹುದು:
- ಇನ್ವರ್ಟರ್;
- ಎಸಿ ಆವರ್ತನ ಪರಿವರ್ತಕ;
- ಆವರ್ತನ ಪರಿವರ್ತಕ;
- ವೇರಿಯಬಲ್ ಫ್ರೀಕ್ವೆನ್ಸಿ ಡ್ರೈವ್.
ವಿದ್ಯುತ್ ಶಕ್ತಿಯನ್ನು ಯಾಂತ್ರಿಕ ಶಕ್ತಿಯನ್ನಾಗಿ ಪರಿವರ್ತಿಸಲು ಇನ್ವರ್ಟರ್ ಅನ್ನು ಬಳಸಲಾಗುತ್ತದೆ. ಈ ಸಂದರ್ಭದಲ್ಲಿ ನಡೆಸಿದ ಚಲನೆಯನ್ನು ಮತ್ತೊಂದು ಪ್ರಕಾರದ ಚಲನೆಯಾಗಿ ಪರಿವರ್ತಿಸಬಹುದು.
- "ತ್ರಿಕೋನ".
ನೀವು ಏಕ-ಹಂತದ ಡ್ರೈವ್ ಅನ್ನು ನಿಯಂತ್ರಿಸಬೇಕಾದರೆ ರೇಖಾಚಿತ್ರವು ಪ್ರಸ್ತುತವಾಗಿದೆ. ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿನ ಪರಿವರ್ತಕದ ವಿದ್ಯುತ್ ಮಟ್ಟವು ಮೂರು ಕಿಲೋವ್ಯಾಟ್ಗಳವರೆಗೆ ಇರುತ್ತದೆ, ಮತ್ತು ಯಾವುದೇ ಶಕ್ತಿಯು ಕಳೆದುಹೋಗುವುದಿಲ್ಲ.
- "ಸ್ಟಾರ್".
ಕೈಗಾರಿಕಾ ಮೂರು-ಹಂತದ ನೆಟ್ವರ್ಕ್ಗಳಿಂದ ನಡೆಸಲ್ಪಡುವ ಮೂರು-ಹಂತದ ಆವರ್ತನ ಡ್ರೈವ್ಗಳ ಟರ್ಮಿನಲ್ಗಳನ್ನು ಸಂಪರ್ಕಿಸಲು ಸೂಕ್ತವಾದ ವಿಧಾನ.
ಚಿತ್ರವು 8400 ವೆಕ್ಟರ್ ಆವರ್ತನ ಪರಿವರ್ತಕಕ್ಕಾಗಿ ಸಂಪರ್ಕ ರೇಖಾಚಿತ್ರವನ್ನು ತೋರಿಸುತ್ತದೆ
ಆರಂಭಿಕ ಪ್ರವಾಹವನ್ನು ಮಿತಿಗೊಳಿಸಲು ಮತ್ತು 5 kW ಗಿಂತ ಹೆಚ್ಚಿನ ಶಕ್ತಿಯೊಂದಿಗೆ ಎಲೆಕ್ಟ್ರಿಕ್ ಮೋಟರ್ ಅನ್ನು ಪ್ರಾರಂಭಿಸುವಾಗ ಆರಂಭಿಕ ಟಾರ್ಕ್ ಅನ್ನು ಕಡಿಮೆ ಮಾಡಲು, ಸ್ಟಾರ್-ಡೆಲ್ಟಾ ಸ್ವಿಚಿಂಗ್ ಅನ್ನು ಬಳಸಲಾಗುತ್ತದೆ.
ಸ್ಟೇಟರ್ಗೆ ವೋಲ್ಟೇಜ್ ಅನ್ನು ಅನ್ವಯಿಸಿದಾಗ, ಸಾಧನವನ್ನು ನಕ್ಷತ್ರವಾಗಿ ಸಂಪರ್ಕಿಸಲಾಗಿದೆ. ಮೋಟಾರ್ ವೇಗವು ನಾಮಮಾತ್ರ ಮೌಲ್ಯಕ್ಕೆ ಅನುಗುಣವಾಗಿ ಪ್ರಾರಂಭಿಸಿದ ತಕ್ಷಣ, "ತ್ರಿಕೋನ" ಸರ್ಕ್ಯೂಟ್ ಪ್ರಕಾರ ವಿದ್ಯುತ್ ಸರಬರಾಜು ಮಾಡಲಾಗುತ್ತದೆ. ಆದರೆ ತಾಂತ್ರಿಕ ಸಾಮರ್ಥ್ಯಗಳು ಎರಡು ಸರ್ಕ್ಯೂಟ್ಗಳಲ್ಲಿ ಸಂಪರ್ಕಿಸಲು ಅನುಮತಿಸಿದಾಗ ಮಾತ್ರ ಈ ತಂತ್ರವನ್ನು ಬಳಸಲಾಗುತ್ತದೆ.
ಸಂಯೋಜಿತ ನಕ್ಷತ್ರ ಮತ್ತು ಡೆಲ್ಟಾ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿ, ತೀಕ್ಷ್ಣವಾದ ಪ್ರವಾಹದ ಉಲ್ಬಣಗಳನ್ನು ಗಮನಿಸಬಹುದು. ಎರಡನೇ ವಿಧದ ಸಂಪರ್ಕಕ್ಕೆ ಬದಲಾಯಿಸುವಾಗ, ತಿರುಗುವಿಕೆಯ ವೇಗದ ವಾಚನಗೋಷ್ಠಿಗಳು ಗಮನಾರ್ಹವಾಗಿ ಕಡಿಮೆಯಾಗುತ್ತವೆ. ಹಿಂದಿನ ಆಪರೇಟಿಂಗ್ ಮೋಡ್ ಮತ್ತು ವೇಗವನ್ನು ಪುನಃಸ್ಥಾಪಿಸಲು, ಪ್ರಸ್ತುತವನ್ನು ಹೆಚ್ಚಿಸಬೇಕು.
0.4 - 7.5 kW ವಿದ್ಯುತ್ ಮಟ್ಟವನ್ನು ಹೊಂದಿರುವ ವಿದ್ಯುತ್ ಮೋಟರ್ನ ವಿನ್ಯಾಸದಲ್ಲಿ ಆವರ್ತನ ಜನರೇಟರ್ಗಳನ್ನು ಹೆಚ್ಚು ಸಕ್ರಿಯವಾಗಿ ಬಳಸಲಾಗುತ್ತದೆ.
DIY ಆವರ್ತನ ಪರಿವರ್ತಕ ಜೋಡಣೆ
ಆವರ್ತನ ಪರಿವರ್ತಕಗಳ ಕೈಗಾರಿಕಾ ಉತ್ಪಾದನೆಯೊಂದಿಗೆ ಏಕಕಾಲದಲ್ಲಿ, ನಿಮ್ಮ ಸ್ವಂತ ಕೈಗಳಿಂದ ಅಂತಹ ಸಾಧನವನ್ನು ಜೋಡಿಸುವುದು ಪ್ರಸ್ತುತವಾಗಿದೆ. ಪ್ರಕ್ರಿಯೆಯ ತುಲನಾತ್ಮಕ ಸರಳತೆಯಿಂದ ಇದನ್ನು ವಿಶೇಷವಾಗಿ ಸುಗಮಗೊಳಿಸಲಾಗುತ್ತದೆ. ಇನ್ವರ್ಟರ್ನ ಕಾರ್ಯಾಚರಣೆಯ ಪರಿಣಾಮವಾಗಿ, ಒಂದು ಹಂತವನ್ನು ಮೂರು ಆಗಿ ಪರಿವರ್ತಿಸಲಾಗುತ್ತದೆ.
ದೇಶೀಯ ಪರಿಸ್ಥಿತಿಗಳಲ್ಲಿ ಇದೇ ರೀತಿಯ ಸಾಧನವನ್ನು ಹೊಂದಿದ ಎಲೆಕ್ಟ್ರಿಕ್ ಮೋಟಾರ್ಗಳ ಬಳಕೆಯು ಯಾವುದೇ ಹೆಚ್ಚುವರಿ ತೊಂದರೆಗಳನ್ನು ಉಂಟುಮಾಡುವುದಿಲ್ಲ. ಆದ್ದರಿಂದ, ನೀವು ಸುರಕ್ಷಿತವಾಗಿ ವ್ಯವಹಾರಕ್ಕೆ ಇಳಿಯಬಹುದು.

ಚಿತ್ರವು DC ಲಿಂಕ್ನೊಂದಿಗೆ ಆವರ್ತನ ಪರಿವರ್ತಕಗಳ ಬ್ಲಾಕ್ ರೇಖಾಚಿತ್ರವನ್ನು ತೋರಿಸುತ್ತದೆ.
ಅಸೆಂಬ್ಲಿ ಸಮಯದಲ್ಲಿ ಬಳಸಲಾಗುವ ಆವರ್ತನ ಪರಿವರ್ತಕ ಸರ್ಕ್ಯೂಟ್ಗಳು ರಿಕ್ಟಿಫೈಯರ್ ಯುನಿಟ್, ಫಿಲ್ಟರ್ ಎಲಿಮೆಂಟ್ಗಳನ್ನು ಒಳಗೊಂಡಿರುತ್ತವೆ (ಪರ್ಯಾಯ ವಿದ್ಯುತ್ ಘಟಕವನ್ನು ಕತ್ತರಿಸುವ ಜವಾಬ್ದಾರಿ ಮತ್ತು IGBT ಟ್ರಾನ್ಸಿಸ್ಟರ್ಗಳಿಂದ ನಿರ್ಮಿಸಲಾಗಿದೆ). ವೆಚ್ಚದ ವಿಷಯದಲ್ಲಿ, ಪರಿವರ್ತಕದ ಪ್ರತ್ಯೇಕ ಘಟಕಗಳನ್ನು ಖರೀದಿಸುವುದು ಮತ್ತು ಜೋಡಣೆಯನ್ನು ನೀವೇ ಮಾಡುವುದು ಸಿದ್ಧಪಡಿಸಿದ ಸಾಧನವನ್ನು ಖರೀದಿಸುವುದಕ್ಕಿಂತ ಅಗ್ಗವಾಗಿದೆ.
ಸ್ವಯಂ ಜೋಡಣೆಯ ಆವರ್ತನ ಪರಿವರ್ತಕಗಳನ್ನು 0.1 - 0.75 kW ಶಕ್ತಿಯೊಂದಿಗೆ ವಿದ್ಯುತ್ ಮೋಟಾರುಗಳಲ್ಲಿ ಬಳಸಬಹುದು.
ಅದೇ ಸಮಯದಲ್ಲಿ, ಆಧುನಿಕ ಕಾರ್ಖಾನೆ ಆವರ್ತನ ಜನರೇಟರ್ಗಳು ತಮ್ಮ ಉತ್ಪಾದನೆಯಲ್ಲಿ ಮೈಕ್ರೊಕಂಟ್ರೋಲರ್ಗಳನ್ನು ಬಳಸುವುದರಿಂದ ಕಾರ್ಯನಿರ್ವಹಣೆ, ಸುಧಾರಿತ ಕ್ರಮಾವಳಿಗಳು ಮತ್ತು ಕೆಲಸದ ಪ್ರಕ್ರಿಯೆಯ ಸುರಕ್ಷತೆಯ ಮೇಲೆ ಸುಧಾರಿತ ನಿಯಂತ್ರಣವನ್ನು ವಿಸ್ತರಿಸಿದೆ.
ಪರಿವರ್ತಕಗಳ ಅನ್ವಯದ ಪ್ರದೇಶಗಳು:
- ಯಾಂತ್ರಿಕ ಎಂಜಿನಿಯರಿಂಗ್;
- ಜವಳಿ ಉದ್ಯಮ;
- ಇಂಧನ ಮತ್ತು ಶಕ್ತಿ ಸಂಕೀರ್ಣಗಳು;
- ಬೋರ್ಹೋಲ್ ಮತ್ತು ಒಳಚರಂಡಿ ಪಂಪ್ಗಳು;
- ಪ್ರಕ್ರಿಯೆ ನಿಯಂತ್ರಣದ ಆಟೊಮೇಷನ್.
ಎಲೆಕ್ಟ್ರಿಕ್ ಮೋಟಾರ್ಗಳ ವೆಚ್ಚವು ಪರಿವರ್ತಕಗಳೊಂದಿಗೆ ಅಳವಡಿಸಲಾಗಿದೆಯೇ ಎಂಬುದರ ಮೇಲೆ ನೇರವಾಗಿ ಅವಲಂಬಿತವಾಗಿರುತ್ತದೆ.
- ಆಯ್ಕೆಮಾಡುವಾಗ ಬಳಕೆದಾರರು ಶಕ್ತಿಯೊಂದಿಗೆ ತಪ್ಪು ಮಾಡಿದರೆ ಮತ್ತು ಅದು ತುಂಬಾ ಹೆಚ್ಚಿದ್ದರೆ, ಸಂಭವನೀಯ ಓವರ್ಲೋಡ್, ವೋಲ್ಟೇಜ್ ಉಲ್ಬಣಗಳು ಮತ್ತು ಇತರ ಅಂಶಗಳಿಂದ ಮೋಟರ್ ಅನ್ನು ರಕ್ಷಿಸಲು ಪರಿವರ್ತಕಕ್ಕೆ ಸಾಧ್ಯವಾಗುವುದಿಲ್ಲ.
- ಕಡಿಮೆ ಶಕ್ತಿಯು ಉತ್ತಮ ಯಂತ್ರ ದಕ್ಷತೆಗೆ ಪರಿಸ್ಥಿತಿಗಳನ್ನು ಸೃಷ್ಟಿಸುವುದಿಲ್ಲ. ಕಡಿಮೆ ಶಕ್ತಿಯೊಂದಿಗೆ ಪರಿವರ್ತಕವು ಪಂಪಿಂಗ್ ಘಟಕದ ಆಪರೇಟಿಂಗ್ ಮೋಡ್ನ ಹೆಚ್ಚಿನ ಡೈನಾಮಿಕ್ಸ್ ಅನ್ನು ಒದಗಿಸಲು ಸಾಧ್ಯವಾಗುವುದಿಲ್ಲ. ನಿಯತಕಾಲಿಕವಾಗಿ ಸಂಭವಿಸುವ ಓವರ್ಲೋಡ್ಗಳು ಅಸಮರ್ಪಕ ಕಾರ್ಯವನ್ನು ಉಂಟುಮಾಡಬಹುದು.
ಆಯ್ಕೆಮಾಡುವಾಗ ಪರಿಗಣಿಸಬೇಕಾದ ಅಂಶಗಳು
ಸಾಧನದ ಕಾರ್ಯಾಚರಣಾ ಪರಿಸ್ಥಿತಿಗಳು ವಿದ್ಯುತ್ ಮೋಟರ್ನ ಸೇವೆಯ ಜೀವನದ ಮೇಲೆ ಪ್ರಭಾವ ಬೀರುವ ಮಹತ್ವದ ಅಂಶವಾಗಿದೆ. ಆದ್ದರಿಂದ, ಆಯ್ಕೆಮಾಡುವಾಗ, ನೀವು ಈ ಕೆಳಗಿನ ಅಂಶಗಳಿಗೆ ಗಮನ ಕೊಡಬೇಕು:
- ಎಲೆಕ್ಟ್ರಿಕ್ ಮೋಟಾರ್ ಆಪರೇಟಿಂಗ್ ವೇಗ ಮಿತಿಗಳು;
- ಟಾರ್ಕ್ಗಳ ಕೆಲಸದ ಮಿತಿಗಳು;
- ಹೊರೆಯ ಸ್ವರೂಪ;
- ಕೆಲಸದ ವೇಳಾಪಟ್ಟಿ.
ಎಲ್ಲಾ ಗುಣಲಕ್ಷಣಗಳು ಪರಸ್ಪರ ಸಂಬಂಧ ಹೊಂದಿವೆ. ಹೀಗಾಗಿ, ಲೋಡ್ ಹಲವಾರು ವಿಧಗಳನ್ನು ಹೊಂದಿದೆ ಮತ್ತು ವೇಗ, ಟಾರ್ಕ್ ಮತ್ತು ಆರಂಭಿಕ ಟಾರ್ಕ್ನಂತಹ ಗುಣಲಕ್ಷಣಗಳೊಂದಿಗೆ ಸಂಬಂಧಿಸಿದೆ. ಹಾಗೆ ಆಗುತ್ತದೆ:
- ಕ್ರಿಯಾತ್ಮಕ ಅಥವಾ ಎತ್ತುವ ಲೋಡ್ಗಾಗಿ ಬಳಸಲಾಗುತ್ತದೆ, ಉದಾಹರಣೆಗೆ, ಓವರ್ಹೆಡ್ ಕ್ರೇನ್, ಎಲೆಕ್ಟ್ರಿಕ್ ಮೋಟಾರ್ ಅನ್ನು ಇನ್ವರ್ಟರ್ನಿಂದ ಸಂಪರ್ಕಿಸಬಹುದು;
- ಶಕ್ತಿ ವರ್ಗಾವಣೆ ಮತ್ತು ಸಂಗ್ರಹಣೆಯೊಂದಿಗೆ ಲೋಡ್ ಮಾಡಿ.
ತಿರುಗುವಿಕೆ ಮತ್ತು ಟಾರ್ಕ್ ವೇಗಗಳು ವೇಗ, ಟಾರ್ಕ್ ಮತ್ತು ಸಮಯದ ನಿಯತಾಂಕಗಳಿಗೆ ಸಂಬಂಧಿಸಿವೆ, ಅವು ಈ ಕೆಳಗಿನ ಗುಣಲಕ್ಷಣಗಳನ್ನು ಅವಲಂಬಿಸಿರುತ್ತದೆ:
- ಸ್ಥಿರ ಟಾರ್ಕ್ ಮೌಲ್ಯ;
- ಸ್ಥಿರ ವೇಗ;
- ಟಾರ್ಕ್ ಸಂಖ್ಯೆಯನ್ನು ಕಡಿಮೆ ಮಾಡುವುದು;
- ವೇಗ ಕಡಿಮೆಯಾಗುತ್ತಿದೆ.
ಹೊರೆಯ ಸ್ವರೂಪವು ಅಂತಹ ಸೂಚಕಗಳನ್ನು ಅವಲಂಬಿಸಿರುತ್ತದೆ:
ವಿದ್ಯುತ್ ಮೋಟರ್ಗಾಗಿ ಆವರ್ತನ ಪರಿವರ್ತಕವನ್ನು ಲೆಕ್ಕಾಚಾರ ಮಾಡುವಾಗ ವೈಶಿಷ್ಟ್ಯಗಳು
ಆವರ್ತನ ಪರಿವರ್ತಕವನ್ನು ಆಯ್ಕೆಮಾಡುವ ಮೊದಲು, ವಿದ್ಯುತ್ ಮೋಟರ್ಗಾಗಿ ಆವರ್ತನ ಪರಿವರ್ತಕವನ್ನು ಆಯ್ಕೆಮಾಡಿ ಮತ್ತು ಲೆಕ್ಕಾಚಾರ ಮಾಡಿ. ಪುನರಾವರ್ತಿತ ಅಲ್ಪಾವಧಿಯ ವೇಗ ಮಿತಿಗಳನ್ನು ಒಳಗೊಂಡಂತೆ ವೇಗ ಮಿತಿಗಳ ಅವಧಿಗೆ ಗಮನ ಕೊಡಲು ಮರೆಯದಿರಿ. ಪರಿವರ್ತಕದ ಔಟ್ಪುಟ್ನಲ್ಲಿ ಗರಿಷ್ಠ ಪ್ರವಾಹದ ತತ್ಕ್ಷಣದ ಮೌಲ್ಯ ಮತ್ತು ನೇರ ಪ್ರವಾಹದ ಅವಧಿಯನ್ನು ಗಣನೆಗೆ ತೆಗೆದುಕೊಳ್ಳುವುದು ಅವಶ್ಯಕ.
ಗರಿಷ್ಠ ಮತ್ತು ನಾಮಮಾತ್ರ ಆವರ್ತನವನ್ನು ಪರಿಗಣಿಸುವುದು ಮುಖ್ಯ. ಪವರ್ ಲೈನ್ ಕಂಡಕ್ಟರ್ಗಳು ಅಥವಾ ಕೇಬಲ್ ಲೈನ್ನೊಂದಿಗೆ ವಿದ್ಯುತ್ ವಿತರಣಾ ಟ್ರಾನ್ಸ್ಫಾರ್ಮರ್ನ ಶಕ್ತಿ ಅಥವಾ ಪ್ರತಿರೋಧವನ್ನು ಗಣನೆಗೆ ತೆಗೆದುಕೊಳ್ಳಲಾಗುತ್ತದೆ. ವಿದ್ಯುತ್ ಮೂಲವು ಪಂಪಿಂಗ್ ಘಟಕದ ಮೇಲೆ ಪರಿಣಾಮ ಬೀರುತ್ತದೆ; ಸರಬರಾಜು ರೇಖೆಯ ಉದ್ದವು ವೋಲ್ಟೇಜ್ ನಷ್ಟದ ಮೇಲೆ ಪರಿಣಾಮ ಬೀರುತ್ತದೆ. ಹಂತದ ಅಸಮತೋಲನದ ಮೇಲೆ ಪರಿಣಾಮ ಬೀರುವ ಅಸಮ ಹೊರೆಯಿಂದಾಗಿ ಸಂಭವನೀಯ ವೋಲ್ಟೇಜ್ ಉಲ್ಬಣಗಳು ಮತ್ತು ಸಂಭವನೀಯ ಹಂತದ ಅಸಮತೋಲನವನ್ನು ಗಣನೆಗೆ ತೆಗೆದುಕೊಳ್ಳಲಾಗುತ್ತದೆ.
ಯಾಂತ್ರಿಕ ಘರ್ಷಣೆ, ಕಂಡಕ್ಟರ್ ನಷ್ಟಗಳು ಮತ್ತು ಕರ್ತವ್ಯ ಚಕ್ರ ಬದಲಾವಣೆಯಂತಹ ಅಂಶಗಳನ್ನು ಗಣನೆಗೆ ತೆಗೆದುಕೊಳ್ಳಲಾಗುತ್ತದೆ.
ಪಂಪ್ಗಳಿಗಾಗಿ ಆವರ್ತನ ಪರಿವರ್ತಕಗಳ ಆಯ್ಕೆ
ಆವರ್ತನ ಪರಿವರ್ತಕವನ್ನು ಸರಿಯಾಗಿ ಲೆಕ್ಕಾಚಾರ ಮಾಡುವುದು ಮತ್ತು ಅದನ್ನು ಪಂಪ್ ಮಾಡುವ ಘಟಕದೊಂದಿಗೆ ಸಂಯೋಜಿಸುವುದು ಮುಖ್ಯವಾಗಿದೆ. ಲೆಕ್ಕಾಚಾರವು ಪರಿವರ್ತಕದ ಸರಿಯಾದ ಆಯ್ಕೆಯ ಮೇಲೆ ಪ್ರಭಾವ ಬೀರುತ್ತದೆ. ಅದರ ದಕ್ಷತೆ ಮತ್ತು ಬಳಕೆಯ ಬಾಳಿಕೆ, ಪರಿವರ್ತಕ ಮತ್ತು ಸಂಪೂರ್ಣ ವಿದ್ಯುತ್ ಡ್ರೈವ್ (ಪಂಪಿಂಗ್ ಘಟಕ) ಎರಡೂ ಇದನ್ನು ಅವಲಂಬಿಸಿರುತ್ತದೆ.
ಅದನ್ನು ಖರೀದಿಸುವ ಮೊದಲು ಇನ್ವರ್ಟರ್ ಅನ್ನು ಹೇಗೆ ಆರಿಸುವುದು
ಆವರ್ತನ ಪರಿವರ್ತಕವನ್ನು ಆಯ್ಕೆಮಾಡುವ ಮೊದಲು, ಮೋಟಾರ್ ಮತ್ತು ಲೋಡ್ ಸಾಮರ್ಥ್ಯ (ಶಕ್ತಿ) ಯೊಂದಿಗೆ ವಿದ್ಯುತ್ ಹೊಂದಾಣಿಕೆಯನ್ನು ಪರಿಶೀಲಿಸಿ.
ಅಕ್ಕಿ. ಸಂಖ್ಯೆ 1. VFD ಸಿಸ್ಟಮ್ ಕಾರ್ಯಾಚರಣೆಯ ಬ್ಲಾಕ್ ರೇಖಾಚಿತ್ರ.
ಪರಿವರ್ತಕವು ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತಿರುವಾಗ, ಪಾಸ್ಪೋರ್ಟ್ ಗುಣಲಕ್ಷಣಗಳನ್ನು ಅವಲಂಬಿಸಿ ಆಯ್ಕೆಯನ್ನು ಮಾಡಲಾಗುತ್ತದೆ. ಆಯ್ಕೆಮಾಡುವಾಗ, ಈ ಕೆಳಗಿನ ಸೂಚಕಗಳನ್ನು ಗಣನೆಗೆ ತೆಗೆದುಕೊಳ್ಳಲಾಗುತ್ತದೆ:
- ಪಾಸ್ಪೋರ್ಟ್ ಪ್ರಕಾರ, ಇನ್ವರ್ಟರ್ ಮತ್ತು ವಿದ್ಯುತ್ ಮೋಟರ್ನ ಶಕ್ತಿಯು ಸಮಾನವಾಗಿರಬೇಕು. ಎರಡು ಜೋಡಿ ಧ್ರುವಗಳೊಂದಿಗೆ (2p=4), 1500 rpm ವರೆಗಿನ ತಿರುಗುವಿಕೆಯ ವೇಗದೊಂದಿಗೆ, ಸ್ಥಿರವಾದ ಟಾರ್ಕ್ನೊಂದಿಗೆ ಮೋಟಾರ್ಗಳನ್ನು ಬಳಸುವಾಗ ಈ ಪ್ಯಾರಾಮೀಟರ್ ಮಾನ್ಯವಾಗಿರುತ್ತದೆ. ಇದು 150% (ಕನ್ವೇಯರ್ಗಳು, ಕನ್ವೇಯರ್ ಬೆಲ್ಟ್ಗಳು) ಓವರ್ಲೋಡ್ ಅನ್ನು ನಿಭಾಯಿಸಬಲ್ಲ ಇನ್ವರ್ಟರ್ಗಳಿಗೆ ಮತ್ತು 120% (ಅಭಿಮಾನಿಗಳು, ಕೇಂದ್ರಾಪಗಾಮಿ ಪಂಪ್ಗಳು) ಓವರ್ಲೋಡ್ನೊಂದಿಗೆ ಕಾರ್ಯನಿರ್ವಹಿಸುವ ಪರಿವರ್ತಕಗಳಿಗೆ ಸಹ ಅನ್ವಯಿಸುತ್ತದೆ.
- ರೇಟ್ ಮಾಡಲಾದ ಪ್ರವಾಹವು ಮೋಟಾರ್ (ಲೋಡ್ ಕರೆಂಟ್) ಸೇವಿಸುವ ನಿರಂತರ ನೈಜ ಪ್ರವಾಹಕ್ಕೆ ಸಮನಾಗಿರಬೇಕು ಅಥವಾ ಹೆಚ್ಚಿನದಾಗಿರಬೇಕು.
ಪ್ರಮುಖ: ಮೋಟಾರು ಸೇವಿಸುವ ಪ್ರವಾಹವು ನಿರ್ದಿಷ್ಟತೆಯಲ್ಲಿ ನೀಡಲಾದ ಆವರ್ತನ ಪರಿವರ್ತಕದ ದರದ ಪ್ರವಾಹಕ್ಕಿಂತ ಕಡಿಮೆಯಿರಬೇಕು.
150% ರ ಆರಂಭಿಕ ಪ್ರವಾಹದಲ್ಲಿ ಮೋಟಾರ್ ವೇಗವರ್ಧನೆಯ ಸಮಯವು ಪಂಪ್ ಮಾಡುವ ಘಟಕಗಳಲ್ಲಿ ಪರಿಣತಿ ಹೊಂದಿರುವ ಪರಿವರ್ತಕಗಳಿಗೆ 120% ಆಗಿದೆ, ರೇಟ್ ಮಾಡಲಾದ ಇನ್ವರ್ಟರ್ನಿಂದ ಸಾಮಾನ್ಯವಾಗಿ 60 ಸೆಕೆಂಡುಗಳನ್ನು ಮೀರಬಾರದು.
- ನೆಟ್ವರ್ಕ್ನ ಇನ್ಪುಟ್ ವೋಲ್ಟೇಜ್ ಪರಿವರ್ತಕವನ್ನು ಪೂರೈಸಬೇಕು; ಇದು ರೂಢಿಯಲ್ಲಿರುವ ಯಾವುದೇ ವೋಲ್ಟೇಜ್ ವಿಚಲನಗಳೊಂದಿಗೆ ಅದರ ಕಾರ್ಯವನ್ನು ನಿರ್ವಹಿಸಬೇಕು.
- ಇನ್ವರ್ಟರ್ ಬೆಂಬಲಿಸುವ ಆವರ್ತನ ನಿಯಂತ್ರಣ ಶ್ರೇಣಿಯು ಮೋಟಾರಿನ ಹೆಚ್ಚಿನ ವೇಗದ ಮೋಡ್ ಅನ್ನು ಪೂರೈಸಬೇಕು.
- ಬಳಕೆದಾರರಿಂದ ಪ್ರೋಗ್ರಾಮ್ ಮಾಡಲಾದ ವಿವಿಧ ರೀತಿಯ ಆಜ್ಞೆಗಳನ್ನು ನಮೂದಿಸಲು ಡಿಸ್ಕ್ರೀಟ್ ಕಂಟ್ರೋಲ್ ಇನ್ಪುಟ್ಗಳ ಉಪಸ್ಥಿತಿಯು ಅವಶ್ಯಕವಾಗಿದೆ. ಅನಲಾಗ್ ಕೂಡ ಅಗತ್ಯವಿದೆ; ಅವುಗಳನ್ನು ಕಾರ್ಯ ಸಂಕೇತಗಳನ್ನು ಇನ್ಪುಟ್ ಮಾಡಲು ಮತ್ತು ಪ್ರತಿಕ್ರಿಯೆಗಾಗಿ ಬಳಸಲಾಗುತ್ತದೆ. ಎನ್ಕಾರ್ಡರ್ಗಳು ಅಥವಾ ಡಿಜಿಟಲ್ ವೇಗ ಮತ್ತು ಸ್ಥಾನ ಸಂವೇದಕಗಳಿಂದ ಬರುವ ಅಧಿಕ-ಆವರ್ತನ ಸಂಕೇತಗಳಿಗೆ ಡಿಜಿಟಲ್ ಇನ್ಪುಟ್ಗಳು ಸಹ ಅಗತ್ಯವಿದೆ.
- ಪಂಪಿಂಗ್ ಸ್ಟೇಷನ್ ಸಿಸ್ಟಮ್ಗಾಗಿ ಸಂಕೀರ್ಣ ಸರ್ಕ್ಯೂಟ್ಗಳನ್ನು ರಚಿಸಲು ಹಲವಾರು ಔಟ್ಪುಟ್ ಸಿಗ್ನಲ್ಗಳನ್ನು ಬಳಸಲಾಗುತ್ತದೆ.
- ಆಪರೇಟಿಂಗ್ ಮೋಡ್ನಲ್ಲಿ ಕಾರ್ಯಾಚರಣೆಯ ನಿಯಂತ್ರಣದ ಸಾಧ್ಯತೆ, ಇವುಗಳು ರಿಮೋಟ್ ಕಂಟ್ರೋಲ್ ಅನ್ನು ಬಳಸಿಕೊಂಡು ನಿಯಂತ್ರಣ ಒಳಹರಿವುಗಳಾಗಿರಬಹುದು. ಅಥವಾ ನಿಯಂತ್ರಕ ಅಥವಾ ಕಂಪ್ಯೂಟರ್ ಮೂಲಕ ಸರಣಿ ಸಂವಹನ ಬಸ್ ಮೂಲಕ ನಿಯಂತ್ರಿಸಿ. ಬಹುಶಃ ಇದು ಸಂಯೋಜಿತ ನಿಯಂತ್ರಣವಾಗಿರುತ್ತದೆ.
- ಪರಿವರ್ತಕದ ಆಯ್ಕೆಯು ವಿದ್ಯುತ್ ಮೋಟರ್ ಅನ್ನು ನಿಯಂತ್ರಿಸುವ ವಿಧಾನದ ಆದ್ಯತೆಯನ್ನು ಅವಲಂಬಿಸಿರುತ್ತದೆ. ಪ್ರತ್ಯೇಕ ವೆಕ್ಟರ್ ಮೋಟಾರ್ ನಿಯಂತ್ರಣ ಅಥವಾ ಸ್ಕೇಲಾರ್ ನಿಯಂತ್ರಣವನ್ನು ಅವಲಂಬಿಸಿರುತ್ತದೆ - ಔಟ್ಪುಟ್ ಆವರ್ತನಕ್ಕೆ ಔಟ್ಪುಟ್ ವೋಲ್ಟೇಜ್ನ ಒಂದು ಸ್ಥಿರ ಅನುಪಾತವನ್ನು ನಿರ್ವಹಿಸುವುದು. ಪಂಪ್ ಮಾಡುವ ಘಟಕಗಳಿಗೆ, ವೆಕ್ಟರ್ ನಿಯಂತ್ರಣ ವಿಧಾನವು ಹೆಚ್ಚು ವಿಶಿಷ್ಟವಾಗಿದೆ.
- ಸ್ಥಿರ ವೇಗದಲ್ಲಿ ಎಂಜಿನ್ ಕಾರ್ಯಾಚರಣೆಯನ್ನು ನಿರ್ಧರಿಸುವ ಹೆಚ್ಚು ನಿಖರವಾದ ಆಯ್ಕೆ ಮಾನದಂಡಗಳ ಕಡೆಗೆ. ಪರಿವರ್ತಕವು ಒಂದು ಮೋಟರ್ನೊಂದಿಗೆ ಕಾರ್ಯನಿರ್ವಹಿಸಿದಾಗ, ಪ್ರಾರಂಭಿಸಲು ಅಗತ್ಯವಾದ ಶಕ್ತಿಯನ್ನು ಸೂತ್ರದಿಂದ ಲೆಕ್ಕಹಾಕಲಾಗುತ್ತದೆ:
ಅಕ್ಕಿ. ಸಂಖ್ಯೆ 2. ಒಟ್ಟು ಆರಂಭಿಕ ಶಕ್ತಿಯನ್ನು ಲೆಕ್ಕಾಚಾರ ಮಾಡಲು ಸೂತ್ರ.
220/380V ಯ ಮುಖ್ಯ ವೋಲ್ಟೇಜ್ನಲ್ಲಿ ಪರಿವರ್ತಕದಿಂದ ಮೋಟಾರ್ ಕರೆಂಟ್ ಬಳಕೆಯನ್ನು ಸೂತ್ರವನ್ನು ಬಳಸಿಕೊಂಡು ಲೆಕ್ಕಹಾಕಲಾಗುತ್ತದೆ:

ಅಕ್ಕಿ. ಸಂಖ್ಯೆ 3. ಎಂಜಿನ್ನ ಯಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳ ಲೆಕ್ಕಾಚಾರ.
ಪ್ರಮುಖ: ಪ್ರಸ್ತುತ ಗುಣಲಕ್ಷಣಗಳ ಆಧಾರದ ಮೇಲೆ ಸರಿಯಾದ ಆವರ್ತನ ಪರಿವರ್ತಕವನ್ನು ಹೇಗೆ ಆಯ್ಕೆ ಮಾಡಬೇಕೆಂಬುದರ ಅವಶ್ಯಕತೆಯಿಂದ ಮಾರ್ಗದರ್ಶನ, ಇನ್ವರ್ಟರ್ ಎಲ್ಲಾ ಮಾನದಂಡಗಳು ಮತ್ತು ಅವಶ್ಯಕತೆಗಳನ್ನು ಅನುಸರಿಸಬೇಕು, ಆದರೆ ವಿದ್ಯುತ್ ಮಾನದಂಡಗಳನ್ನು ನಿರ್ಲಕ್ಷಿಸಬಹುದು.

ಅಕ್ಕಿ. ಸಂಖ್ಯೆ 4. ಹಲವಾರು ಮೋಟಾರ್ಗಳೊಂದಿಗೆ ಒಂದು ಆವರ್ತನ ಡ್ರೈವ್ ಅನ್ನು ನಿರ್ವಹಿಸಲು ಇನ್ವರ್ಟರ್ ಅನ್ನು ಆಯ್ಕೆಮಾಡುವಾಗ ಗಮನಿಸಬೇಕಾದ ಅಸಮಾನತೆಗಳ ಕೋಷ್ಟಕ.
ಆವರ್ತನ ಪರಿವರ್ತಕವನ್ನು ಬಳಸುವ ಪ್ರಯೋಜನಗಳು

ಚಿತ್ರ ಸಂಖ್ಯೆ 5. ಆವರ್ತನ ಪರಿವರ್ತಕವನ್ನು ಆಯ್ಕೆ ಮಾಡುವ ಪ್ರಯೋಜನಗಳು
ಆವರ್ತನ ಪರಿವರ್ತಕದ ಅನುಕೂಲಗಳು ಹಲವಾರು ಪ್ರಮುಖ ಗುಣಗಳನ್ನು ಒಳಗೊಂಡಿವೆ:
- ನಿಜವಾದ ಕಾರ್ಯಾಚರಣಾ ಮೌಲ್ಯಕ್ಕೆ ಆರಂಭಿಕ ಪ್ರವಾಹವನ್ನು ಕಡಿಮೆ ಮಾಡುವುದು. ನೆಟ್ವರ್ಕ್ನಿಂದ ನೇರವಾಗಿ ಎಲೆಕ್ಟ್ರಿಕ್ ಮೋಟರ್ ಅನ್ನು ಶಕ್ತಿಯುತಗೊಳಿಸುವ ಮತ್ತು ಪರಿವರ್ತಕದಿಂದ ಶಕ್ತಿಯನ್ನು ನೀಡುವ ಪರಿಸ್ಥಿತಿಗಳು ವಿಭಿನ್ನವಾಗಿವೆ. ಮೊದಲ ಪ್ರಕರಣದಲ್ಲಿ, ಆರಂಭಿಕ ಪ್ರವಾಹವು ಮೋಟಾರ್ ಪ್ರವಾಹದ ದರದ ಮೌಲ್ಯಕ್ಕಿಂತ ಏಳು ಪಟ್ಟು ಕಡಿಮೆಯಿಲ್ಲ. ಮೋಟಾರ್ನ ಮುಖ್ಯ ಪೂರೈಕೆಯ ವೋಲ್ಟೇಜ್ನ ಆವರ್ತನದಲ್ಲಿ ಕ್ರಮೇಣ ಮೃದುವಾದ ಹೆಚ್ಚಳದೊಂದಿಗೆ ಮೃದುವಾದ ಪ್ರಾರಂಭವನ್ನು ಸ್ಥಿರ-ಸ್ಥಿತಿಯ ಆಪರೇಟಿಂಗ್ ಮೋಡ್ನಲ್ಲಿ ಮೋಟಾರು ಸೇವಿಸುವ ವಾಸ್ತವಕ್ಕೆ ಕಡಿಮೆ ಮಾಡಬಹುದು. ವೇಗವರ್ಧನೆಯ ಸಮಯವನ್ನು ಹೊಂದಿಸುವ ಮೂಲಕ ಇದನ್ನು ಸಾಧಿಸಲಾಗುತ್ತದೆ; ಜಡತ್ವದ ಹೊರೆಯನ್ನು ವೇಗಗೊಳಿಸಲು ಅಗತ್ಯವಿದ್ದರೆ, ಪರಿವರ್ತಕವು ಮೋಟಾರ್ ಶಕ್ತಿಗಿಂತ ಹೆಚ್ಚಿನ ಶಕ್ತಿಯನ್ನು ಒದಗಿಸುತ್ತದೆ.
- ವೇರಿಯಬಲ್ ಟಾರ್ಕ್ನೊಂದಿಗೆ ಲೋಡ್ಗಳ ಮೇಲೆ ಕೆಲಸ ಮಾಡಲು ಗರಿಷ್ಠವಾಗಿ ಆಧಾರಿತವಾದ ಪರಿವರ್ತಕಗಳ ಮಾದರಿಗಳಿವೆ, ಅವುಗಳೆಂದರೆ, ಕೇಂದ್ರಾಪಗಾಮಿ ಪಂಪ್ಗಳನ್ನು ಹೊಂದಿದ ಪಂಪಿಂಗ್ ಸ್ಟೇಷನ್ಗಳಿಗೆ. ಪರಿವರ್ತಕದ ರೇಟ್ ಮಾಡಲಾದ ಪ್ರವಾಹವು ಮೋಟಾರಿನ ರೇಟಿಂಗ್ಗಳಿಗಿಂತ ಎರಡು ಹಂತಗಳಿಗಿಂತ ಹೆಚ್ಚಿನದಾಗಿರುತ್ತದೆ.
- ಪಂಪಿಂಗ್ ಘಟಕಗಳನ್ನು ಪ್ರಾರಂಭಿಸಲು ಕನಿಷ್ಠ 30% ಶಕ್ತಿಯ ಉಳಿತಾಯವನ್ನು ಒದಗಿಸುತ್ತದೆ.
ವೆಕ್ಟರ್ ಆವರ್ತನ ಪರಿವರ್ತಕಗಳ ಅನಾನುಕೂಲಗಳು:
- ವೆಕ್ಟರ್ ಪರಿವರ್ತಕವನ್ನು ಹೊಂದಿಸುವುದು ಕಷ್ಟ; ತಜ್ಞರೊಂದಿಗೆ ಸಮಾಲೋಚನೆ ಅಗತ್ಯವಿದೆ. ಇಂಡಕ್ಟನ್ಸ್ ಸೇರಿದಂತೆ ವಿದ್ಯುತ್ ಮೋಟರ್ನ ನಿಯತಾಂಕಗಳನ್ನು ಗಣನೆಗೆ ತೆಗೆದುಕೊಳ್ಳಲಾಗುತ್ತದೆ.
- ಎಲೆಕ್ಟ್ರಿಕ್ ಡ್ರೈವ್ ಅನ್ನು ಬಳಸುವ ತಂತ್ರಜ್ಞಾನವು 100% ನಿಖರತೆಯನ್ನು ಸೂಚಿಸಬೇಕು; ಈ ಸಂದರ್ಭದಲ್ಲಿ ಮಾತ್ರ ಇನ್ವರ್ಟರ್ ಆಯ್ಕೆಯನ್ನು ಸಮರ್ಥಿಸಲಾಗುತ್ತದೆ.
- ವೆಕ್ಟರ್ ಪರಿವರ್ತಕವನ್ನು ಆಯ್ಕೆಮಾಡುವಾಗ, ಸ್ಕೇಲಾರ್ ಮೋಡ್ನಿಂದ ಬದಲಾಯಿಸಲು ನೀವು ನೆನಪಿಟ್ಟುಕೊಳ್ಳಬೇಕು.
- ಅಳತೆಯ ಉಪಕರಣಗಳು ಮತ್ತು ಪ್ರಸ್ತುತ ಸಂವೇದಕಗಳ ನಿಖರತೆಗೆ ಹೆಚ್ಚಿನ ಅವಶ್ಯಕತೆಗಳು, ಇದು ವೆಚ್ಚದ ಮೇಲೆ ಪರಿಣಾಮ ಬೀರುತ್ತದೆ.
- ನಿರ್ದಿಷ್ಟ ವಿದ್ಯುತ್ ಮೋಟರ್ಗಾಗಿ ವೆಕ್ಟರ್ ಇನ್ವರ್ಟರ್ ಅನ್ನು ಬಳಸಲು ಸಲಹೆ ನೀಡಲಾಗುತ್ತದೆ.
ಆವರ್ತನ ಪರಿವರ್ತಕದ ಅತ್ಯುತ್ತಮ ಆಯ್ಕೆಯು ಅದರ ಕಾರ್ಯವನ್ನು ವಿದ್ಯುತ್ ಮೋಟರ್ನ ತಾಂತ್ರಿಕ ಗುಣಲಕ್ಷಣಗಳೊಂದಿಗೆ ಹೊಂದಿಸಲು ಬರುತ್ತದೆ. ಆವರ್ತನ ಪರಿವರ್ತಕದ ಸರಿಯಾದ ಆಯ್ಕೆಯು ನಿಮ್ಮ ವಿದ್ಯುತ್ ಉಪಕರಣಗಳ ವಿಶ್ವಾಸಾರ್ಹ ಮತ್ತು ದೀರ್ಘಕಾಲೀನ ಕಾರ್ಯಾಚರಣೆಯನ್ನು ಖಚಿತಪಡಿಸುತ್ತದೆ.
1. ಲೋಡ್ ವಿಧದ ಆಯ್ಕೆ
ಸಾಮಾನ್ಯವಾಗಿ ಓವರ್ಲೋಡ್ ಸಾಮರ್ಥ್ಯವನ್ನು ಗರಿಷ್ಠ ಅನುಮತಿಸುವ ಸಮಯದೊಂದಿಗೆ ದರದ ಪ್ರವಾಹದ ಶೇಕಡಾವಾರು ಎಂದು ನಿರ್ದಿಷ್ಟಪಡಿಸಲಾಗುತ್ತದೆ
ತಕ್ಷಣದ ರಕ್ಷಣೆಯನ್ನು ಸಕ್ರಿಯಗೊಳಿಸುವವರೆಗೆ ಈ ಓವರ್ಲೋಡ್ನ ಕ್ರಿಯೆ. ಹೀಗಾಗಿ, ಸರಿಯಾದ ಆಯ್ಕೆ ಮಾಡಲು, ನಿಮ್ಮ ನಿರ್ದಿಷ್ಟ ಕಾರ್ಯವಿಧಾನದ ಓವರ್ಲೋಡ್ಗಳ ಸ್ವರೂಪವನ್ನು ನೀವು ತಿಳಿದುಕೊಳ್ಳಬೇಕು, ನಿರ್ದಿಷ್ಟವಾಗಿ: ಓವರ್ಲೋಡ್ಗಳ ಮಟ್ಟ ಏನು, ಅವುಗಳ ಅವಧಿ ಏನು ಮತ್ತು ಎಷ್ಟು ಬಾರಿ ಅವು ಕಾಣಿಸಿಕೊಳ್ಳುತ್ತವೆ. ಅತ್ಯಂತ ಸಾಮಾನ್ಯವಾದ 2 ವಿಧದ ಲೋಡ್ಗಳು:
- ಆಪರೇಟಿಂಗ್ ಸ್ಪೀಡ್ ಶ್ರೇಣಿಯಲ್ಲಿ (ಕನ್ವೇಯರ್ಗಳು, ಎಲಿವೇಟರ್ಗಳು, ಎಕ್ಸ್ಟ್ರೂಡರ್ಗಳು, ಇತ್ಯಾದಿ) ನಿರಂತರ ಲೋಡ್ ಕ್ಷಣದೊಂದಿಗೆ ("PM"). ಈ ರೀತಿಯ ಲೋಡ್ ಅನ್ನು 10 ... 50% ವರೆಗಿನ ಓವರ್ಲೋಡ್ಗಳಿಂದ ನಿರೂಪಿಸಲಾಗಿದೆ.
- ಕ್ವಾಡ್ರಾಟಿಕ್ ಲೋಡ್ ಕ್ಷಣದೊಂದಿಗೆ ("KM") ಆಪರೇಟಿಂಗ್ ಸ್ಪೀಡ್ ಶ್ರೇಣಿಯಲ್ಲಿ (ಪಂಪ್ಗಳು, ಅಭಿಮಾನಿಗಳು, ವೇನ್ ಕಂಪ್ರೆಸರ್ಗಳು). ಈ ರೀತಿಯ ಘಟಕಗಳಿಗೆ, 10% ಕ್ಕಿಂತ ಹೆಚ್ಚಿನ ಓವರ್ಲೋಡ್ಗಳು ವಿಶಿಷ್ಟವಾಗಿರುತ್ತವೆ. ಕ್ವಾಡ್ರಾಟಿಕ್ ಲೋಡ್ ಕ್ಷಣದೊಂದಿಗೆ ಘಟಕಗಳಲ್ಲಿ ಯಾವುದೇ ಓವರ್ಲೋಡ್ಗಳಿಲ್ಲ ಎಂಬ ಅಂಶದಿಂದಾಗಿ, ಈ ಘಟಕಗಳಲ್ಲಿ ಕಡಿಮೆ ರೇಟಿಂಗ್ನ ಇನ್ವರ್ಟರ್ಗಳನ್ನು ಸ್ಥಾಪಿಸಲು ಸಾಧ್ಯವಿದೆ.
2. ರೇಟ್ ಮಾಡಲಾದ ಮೋಟಾರ್ ಕರೆಂಟ್ ಮತ್ತು ಪೂರೈಕೆ ವೋಲ್ಟೇಜ್ನ ನಿರ್ಣಯ
ರೇಟ್ ಮಾಡಲಾದ ಕರೆಂಟ್ ಮತ್ತು ವೋಲ್ಟೇಜ್ ಅನ್ನು ನಿರ್ಧರಿಸುವುದು ಬಹಳ ಮುಖ್ಯವಾದ ವಿಷಯವಾಗಿದೆ. 380V ಯ ಮೂರು-ಹಂತದ ಕೈಗಾರಿಕಾ ನೆಟ್ವರ್ಕ್ನಿಂದ ವಿದ್ಯುತ್ ಸರಬರಾಜು ಅತ್ಯಂತ ಸಾಮಾನ್ಯವಾದ ಪ್ರಕರಣವಾಗಿದೆ, ಆದರೆ 220-240V ನ ಏಕ-ಹಂತದ ನೆಟ್ವರ್ಕ್ನಿಂದ ಕಾರ್ಯನಿರ್ವಹಿಸಲು ಡ್ರೈವ್ ಅನ್ನು ವಿನ್ಯಾಸಗೊಳಿಸಿದಾಗ ಪ್ರಕರಣಗಳಿವೆ. ನಿಯಮದಂತೆ, ಅಂತಹ ಡ್ರೈವ್ಗಳು 3.7 kW ವರೆಗಿನ ಶಕ್ತಿಗಳ ಶ್ರೇಣಿಗೆ ಸೀಮಿತವಾಗಿವೆ. ತುಲನಾತ್ಮಕವಾಗಿ ಕಡಿಮೆ ಪ್ರಸ್ತುತ ಮೌಲ್ಯಗಳಲ್ಲಿ ಈಗಾಗಲೇ MW ನಲ್ಲಿ ಅಳೆಯಲಾದ ಶಕ್ತಿಗಳೊಂದಿಗೆ ಹೆಚ್ಚು ಶಕ್ತಿಯುತ ಮೋಟಾರ್ಗಳನ್ನು ನಿಯಂತ್ರಿಸುವ ಸಾಮರ್ಥ್ಯದೊಂದಿಗೆ ಹೆಚ್ಚಿನ-ವೋಲ್ಟೇಜ್ ಡ್ರೈವ್ಗಳಿಗೆ ಆಯ್ಕೆಗಳಿವೆ.
ಇನ್ವರ್ಟರ್ನ ರೇಟ್ ಔಟ್ಪುಟ್ ಪ್ರವಾಹವನ್ನು ನಿರ್ಧರಿಸಲು ಇದು ಅವಶ್ಯಕವಾಗಿದೆ. ಇದು ಮೋಟಾರ್ನ ರೇಟ್ ಮಾಡಲಾದ ಕರೆಂಟ್ಗೆ ಸಮನಾಗಿರಬೇಕು ಅಥವಾ ಹೆಚ್ಚಿನದಾಗಿರಬೇಕು. ಆವರ್ತನ ಪರಿವರ್ತಕವು ಅನೇಕ ವರ್ಷಗಳಿಂದ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತಿರುವ ಅಸಮಕಾಲಿಕ ಮೋಟರ್ಗಾಗಿ ವಿನ್ಯಾಸಗೊಳಿಸಿದ್ದರೆ, ಉದ್ದೇಶಪೂರ್ವಕವಾಗಿ ಹೆಚ್ಚಿನ ಔಟ್ಪುಟ್ ಪ್ರವಾಹದೊಂದಿಗೆ ಆವರ್ತನ ಪರಿವರ್ತಕವನ್ನು ಆಯ್ಕೆ ಮಾಡಲು ನಾವು ಶಿಫಾರಸು ಮಾಡುತ್ತೇವೆ.
3. ಪವರ್ ಆಯ್ಕೆ
ವಿದ್ಯುತ್ ಡ್ರೈವ್ನ ಮುಖ್ಯ ನಿಯತಾಂಕಗಳಲ್ಲಿ ಪವರ್ ಒಂದಾಗಿದೆ. ಆವರ್ತನ ಜನರೇಟರ್ ಅನ್ನು ಆಯ್ಕೆಮಾಡುವಾಗ, ಮೊದಲನೆಯದಾಗಿ, ನೀವು ಅದರ ಲೋಡ್ ಸಾಮರ್ಥ್ಯವನ್ನು ನಿರ್ಧರಿಸಬೇಕು. ಎಂಜಿನ್ನ ಲಭ್ಯವಿರುವ ದರದ ಶಕ್ತಿಗೆ ಅನುಗುಣವಾಗಿ, ಅದೇ ಶಕ್ತಿಗಾಗಿ ವಿನ್ಯಾಸಗೊಳಿಸಲಾದ ವೇರಿಯಬಲ್ ವೇಗದ ಡ್ರೈವ್ ಅನ್ನು ಆಯ್ಕೆಮಾಡಲಾಗುತ್ತದೆ. ಮತ್ತು ಅಂತಹ ಆಯ್ಕೆಯು ಸರಿಯಾಗಿರುತ್ತದೆ, ಶಾಫ್ಟ್ ಮೇಲಿನ ಹೊರೆ ಕ್ರಿಯಾತ್ಮಕವಾಗಿ ಬದಲಾಗುವುದಿಲ್ಲ ಮತ್ತು ಪ್ರಸ್ತುತವು ನಾಮಮಾತ್ರದ ಸೆಟ್ ಮೌಲ್ಯವನ್ನು ಗಮನಾರ್ಹವಾಗಿ ಮೀರುವುದಿಲ್ಲ, ನಿರ್ದಿಷ್ಟ ಮೋಟಾರ್ ಮತ್ತು ಆವರ್ತನ ವಿತರಣಾ ಸಾಧನಕ್ಕಾಗಿ. ಆದ್ದರಿಂದ, ಪರಿವರ್ತಕದಿಂದ ಎಲೆಕ್ಟ್ರಿಕ್ ಮೋಟಾರು ಸೇವಿಸುವ ಪ್ರವಾಹದ ಗರಿಷ್ಠ ಮೌಲ್ಯವನ್ನು ಆಧರಿಸಿ ಆಯ್ಕೆ ಮಾಡುವುದು ಹೆಚ್ಚು ಸರಿಯಾಗಿರುತ್ತದೆ, ನಂತರದ ಓವರ್ಲೋಡ್ ಸಾಮರ್ಥ್ಯವನ್ನು ಗಣನೆಗೆ ತೆಗೆದುಕೊಳ್ಳುತ್ತದೆ.
4. ಪರಿಸರದ ಪರಿಸ್ಥಿತಿಗಳು
ಧೂಳು ಮತ್ತು ತೇವಾಂಶದ ಉಪಸ್ಥಿತಿಯು ಪರಿವರ್ತಕದ ರಕ್ಷಣೆಯ ಮಟ್ಟವನ್ನು (IP) ನಿರ್ಧರಿಸುತ್ತದೆ: IP00 / IP20 / IP21 / IP54
ಹೆಚ್ಚಿನ ಆರ್ದ್ರತೆ ಮತ್ತು ಆಕ್ರಮಣಕಾರಿ ಪರಿಸರದ ಪರಿಸ್ಥಿತಿಗಳಲ್ಲಿ ಆವರ್ತನ ಪರಿವರ್ತಕಗಳನ್ನು ಬಳಸಿದರೆ, ವಾರ್ನಿಷ್ ಬೋರ್ಡ್ಗಳನ್ನು ಬಳಸಲು ನಾವು ಶಿಫಾರಸು ಮಾಡುತ್ತೇವೆ.
5. EMC ಅಗತ್ಯತೆಗಳು (ವಿದ್ಯುತ್ಕಾಂತೀಯ ಹೊಂದಾಣಿಕೆ)
ಆವರ್ತನ ಪರಿವರ್ತಕಗಳನ್ನು ಅಂತರ್ನಿರ್ಮಿತ EMC ಫಿಲ್ಟರ್ನೊಂದಿಗೆ ತಯಾರಿಸಬಹುದು ಅಥವಾ ಹೆಚ್ಚುವರಿಯಾಗಿ ಈ ಫಿಲ್ಟರ್ನ ಖರೀದಿಯ ಅಗತ್ಯವಿರುತ್ತದೆ.
6. ವೇಗದ ಬ್ರೇಕಿಂಗ್
ಬ್ರೇಕ್ ಚಾಪರ್ ಮತ್ತು ಬ್ರೇಕ್ ರೆಸಿಸ್ಟರ್ನ ಉಪಸ್ಥಿತಿ ಅಥವಾ ಅನುಪಸ್ಥಿತಿಯಿಂದ ಅಗತ್ಯವನ್ನು ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ. ಎಲೆಕ್ಟ್ರಿಕ್ ಮೋಟರ್ನ ತಿರುಗುವಿಕೆಯ ವೇಗವನ್ನು ಶೂನ್ಯಕ್ಕೆ ಕಡಿಮೆ ಮಾಡಲು, ಮೂರು ವಿಧಾನಗಳನ್ನು ಬಳಸಲಾಗುತ್ತದೆ:

7. ನೆಟ್ವರ್ಕ್ ಎಕ್ಸ್ಚೇಂಜ್. ಮೋಟಾರ್ ನಿಯಂತ್ರಣ ವಿಧಾನ
ಎಲೆಕ್ಟ್ರಿಕ್ ಮೋಟಾರ್ ಮತ್ತು ಸ್ವಯಂಚಾಲಿತ ನಿಯಂತ್ರಣ ವ್ಯವಸ್ಥೆಯ ನಡುವೆ ಒಟ್ಟಿಗೆ ಕೆಲಸ ಮಾಡಲು, ವಿವಿಧ ಡೇಟಾ ವರ್ಗಾವಣೆ ಪ್ರೋಟೋಕಾಲ್ಗಳನ್ನು ಬಳಸಲಾಗುತ್ತದೆ. ಹೆಚ್ಚು ವ್ಯಾಪಕವಾಗಿ ಬಳಸಲಾಗುವ ಸಂವಹನ ಪ್ರೋಟೋಕಾಲ್ RS-485 ಇಂಟರ್ಫೇಸ್ನೊಂದಿಗೆ Modbus ಆಗಿದೆ, ಆದಾಗ್ಯೂ, ಬಳಸಿದ ಉಪಕರಣವನ್ನು ಅವಲಂಬಿಸಿ, ಪ್ರತಿ ನಿರ್ದಿಷ್ಟ ಪ್ರಕರಣಕ್ಕೆ ಒಂದು ಅಥವಾ ಇನ್ನೊಂದು ಪ್ರೋಟೋಕಾಲ್ ಅನ್ನು ಬಳಸುವ ಪ್ರಶ್ನೆಯನ್ನು ನಿರ್ದಿಷ್ಟಪಡಿಸಲಾಗಿದೆ. ಪರಿವರ್ತಕವನ್ನು ನಿಯಂತ್ರಿಸುವ ವಿಧಾನವನ್ನು ಆವರ್ತನ ಪರಿವರ್ತಕದ ಇಂಟರ್ಫೇಸ್ ಬೋರ್ಡ್ಗಳ ಪ್ರಕಾರ ಮತ್ತು ಸಂಖ್ಯೆಯಿಂದ ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ. ಆಧುನಿಕ ಪರಿವರ್ತಕಗಳು "ಬಾಹ್ಯ ನಿಯಂತ್ರಣ" ವಿಧಾನಗಳಲ್ಲಿ ಕಾರ್ಯನಿರ್ವಹಿಸಬಹುದು, ಪರಿವರ್ತಕವನ್ನು ಬಾಹ್ಯ ಸಂಕೇತಗಳಿಂದ ನಿಯಂತ್ರಿಸಿದಾಗ, "ರಿಮೋಟ್ ಕಂಟ್ರೋಲ್", "ಸಂಯೋಜಿತ ನಿಯಂತ್ರಣ" ಮತ್ತು "ಸರಣಿ ಇಂಟರ್ಫೇಸ್ ನಿಯಂತ್ರಣ". ಆಧುನಿಕ ತಂತ್ರಜ್ಞಾನದಲ್ಲಿ, ಅತ್ಯಂತ ಸಾಮಾನ್ಯವಾದ ಎರಡು ನಿಯಂತ್ರಣ (ಸೆಟ್) ಸಿಗ್ನಲ್ಗಳು: 0-10 ವಿ ಮತ್ತು 4-20 ವಿ. ಆವರ್ತನ ಪರಿವರ್ತಕ ಸ್ವತಃ ತಿರುಗುವಿಕೆಯ ವೇಗವನ್ನು ನಿಯಂತ್ರಿಸುವ ಸಾಮರ್ಥ್ಯವನ್ನು ಹೊಂದಿದೆ. ಈ ಉದ್ದೇಶಕ್ಕಾಗಿ, ಇನ್ವರ್ಟರ್ನಲ್ಲಿ PID ನಿಯಂತ್ರಕವನ್ನು ನಿರ್ಮಿಸಲಾಗಿದೆ ಮತ್ತು ಯಾವುದೇ ತಾಂತ್ರಿಕ ನಿಯತಾಂಕದ ಪ್ರತಿಕ್ರಿಯೆ ಸಂವೇದಕವನ್ನು ಸಂಪರ್ಕಿಸಲು ಸಹ ಸಾಧ್ಯವಿದೆ.


