Kiinnityslaitteiden tyypit ja niiden laskenta. Konetekniikan oppikirjat Nokkamekanismit. Nokkamekanismien tyypit. Hyödyt ja haitat. Päätarkoitus
VENÄJÄN FEDERAATIOIN LIITTOVALTAINEN KOULUTUSVIRASTO
VALTION Ammattikorkeakoulun OPETUSLAITOS
"TYUMENIN VALTION ÖLJY- JA KAASUN YLIOPISTO"
LIIKENNEINSTITUUTTI
osasto Koneen osat
YLEISKATSAUS MEKANISMIEN TÄRKEIMMÄISIIN TYYPPIHIN
MENETELMÄOHJEET
Vastaanottaja käytännön harjoittelu Tekijä: Teoriat mekanismeista ja koneista erikoisalojen opiskelijoille NR-130503 PST-130501 NB-130504 01, MSO-190207
kokopäiväinen ja osa-aikainen täysi- ja supistettu koulutus
Tjumen 2007
Toimitus- ja julkaisuneuvoston hyväksymä
Tjumenin osavaltion öljy- ja kaasuyliopisto
Kokoonpannut: Associate Professor, Ph.D. Zabanov Mihail Petrovitš
professori, d.t.s. Babichev Dmitri Tikhonovich
assistentti, Pankov Dmitri Nikolajevitš
© Valtion ammatillinen korkeakouluoppilaitos
"Tyumenin osavaltion öljy- ja kaasuyliopisto"
Oppitunnin aikana on tarpeen tutustua pääryhmiin ja mekanismien tyyppeihin, niiden graafisiin kuviin. Opi esittämään todellista mekanismia kaavion muodossa.
Raportin tulee kuvata ja kuvata klassisia mekanismeja.
Konetekniikka on modernin tekniikan johtava ala. Konetekniikan edistymistä määrää uusien tehokkaiden ja luotettavien koneiden luominen. Tämän tärkeimmän ongelman ratkaisu perustuu monien tieteenalojen tulosten ja ennen kaikkea mekanismien ja koneiden teorian monimutkaiseen käyttöön.
Koneiden kehityksen myötä termin "kone" sisältö on muuttunut. Nykyaikaisille koneille annamme seuraavan määritelmän: Kone on ihmisen luoma laite energian, materiaalien ja tiedon muuntamiseksi fyysisen ja henkisen työn helpottamiseksi, sen tuottavuuden lisäämiseksi ja ihmisen osittain tai kokonaan korvaamiseksi hänen työssä ja fysiologisissa toiminnoissaan.
Koneiden suorittamien toimintojen mukaan ne jaetaan seuraaviin luokkiin:
1) Energiakoneet
2) Kuljetusajoneuvot
3) Tekniset koneet
4) Ohjaus ja ohjauskoneet
5) Logiikkakoneet
6) Kyberneettiset koneet
Käsitteen "mekanismi" määritelmää on toistuvasti muutettu, kun uusia mekanismeja on ilmaantunut.
Mekanismi on kappalejärjestelmä, joka on suunniteltu muuttamaan yhden tai useamman jäykän kappaleen liike muiden kappaleiden vaadituiksi liikkeiksi. Jos liikkeen muuntamiseen osallistuu kiinteiden kappaleiden lisäksi nestemäisiä tai kaasumaisia kappaleita, mekanismia kutsutaan vastaavasti hydrauliseksi tai pneumaattiseksi. Toimivuuden suhteen mekanismit on jaettu seuraaviin tyyppeihin:
1) Moottoreiden ja muuntajien mekanismit
2) Vaihteet
3) Toimilaitteet
4) Hallinto-, valvonta- ja sääntelymekanismit
5) Jalostettujen tuotteiden ja esineiden ruokinta-, kuljetus- ja lajittelumekanismit
6) Mekanismit valmiiden tuotteiden automaattiseen laskemiseen, punnitsemiseen ja pakkaamiseen
Mekanismin pääominaisuus on mekaanisen liikkeen muutos. Mekanismi on osa monia koneita, sillä energian, materiaalien ja informaation muuntaminen vaatii yleensä moottorilta tulevan liikkeen muuntamista. On mahdotonta rinnastaa käsitteitä "kone" ja "mekanismi". Ensinnäkin koneessa olevien mekanismien lisäksi on aina lisälaitteita, jotka liittyvät mekanismien ohjaukseen. Toiseksi, on koneita, joissa ei ole mekanismeja. Esimerkiksi viime vuosina on luotu teknologisia koneita, joissa jokaista toimeenpanevaa elintä ohjaa yksittäinen sähkö- tai hydraulimoottori.
Mekanismeja kuvattaessa ne jaettiin erillisiin ryhmiin rakenteensa perusteella (vipu, nokka, kitka, vaihde jne.)
Mekanismit muodostuvat peräkkäisten linkkien liittämisestä alkuperäiseen mekanismiin.
LINKKI - yksi tai useampi kiinteästi toisiinsa liitetty osa, joka sisältyy mekanismiin ja liikkuu yhtenä.
INPUT LINK - linkki, johon liike raportoidaan ja joka muunnetaan mekanismin toimesta muiden linkkien vaadituiksi liikkeiksi. Tulolinkki on kytketty moottoriin tai toisen mekanismin lähtölinkkiin.
OUTPUT LINK - linkki, joka tekee liikkeen, johon mekanismi on tarkoitettu. Lähtölinkki on kytketty käyttölaitteeseen (työkappale, instrumentin osoitin) tai jonkin muun mekanismin tulolinkkiin.
Linkit on liitetty toisiinsa liikkuvasti kinemaattisten parien avulla: rotaatio (sarana) ja translaatio (liukukappale).
TRAJEKTORIA pisteitä(linkki) - pisteen liikeviiva tasossa. Se voi olla suora tai kaareva.
YHTEYDET
Vipumekanismit ovat mekanismeja, jotka sisältävät jäykkiä lenkkejä, jotka on yhdistetty toisiinsa rotaatio- ja translaatiokinemaattisilla pareilla. Yksinkertaisin vipumekanismi on kaksilenkkimekanismi, joka koostuu kiinteästä linkkitelineestä 2 (Kuva 1.1 ) ja liikkuva vipu 1 , jolla on kyky pyöriä kiinteän akselin ympäri (yleensä tämä on alkuperäinen mekanismi).
Kuva 1.1 Kahden linkin kytkentä
TO kaksilenkkeiset vipumekanismit sisältää monien pyörivien koneiden mekanismit: sähkömoottorit, lapaturbiinit ja tuulettimet. Kaikkien näiden koneiden mekanismit koostuvat telineestä ja kiinteissä laakereissa pyörivästä linkistä (roottorista).
Monimutkaisemmat vipumekanismit ovat mekanismeja, jotka koostuvat neljästä lenkistä, ns neljän lenkin mekanismit.
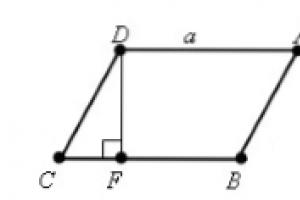
Päällä Kuva 1.2 esittää saranoidun nelilenkin mekanismin, joka koostuu kolmesta liikkuvasta lenkistä 1, 2, 3 ja yhdestä kiinteästä lenkistä 4. Linkki 1 kytkettynä telineeseen, voi tehdä täyden kierroksen ja sitä kutsutaan kammiksi. Tällaista nivellenkkiä, jonka koostumuksessa on yksi kampi ja yksi keinu, kutsutaan kampi-keinumekanismi, jossa kammen pyörimisliike yhdystangon avulla muunnetaan keinuvivun keinuviksi liikkeeksi. Jos kampi ja kiertokankea pidennetään samassa linjassa, keinuvipu ottaa äärimmäisen oikean asennon, ja kun ne asetetaan päällekkäin, se ottaa vasemman asennon.

Riisi. 1.2 Saranoitu nelilenkkimekanismi
Esimerkki tällaisesta mekanismista on kohdassa esitetty mekanismi Kuva 1.3 , missä on linkki 1 – kampi (tulolinkki), linkki 2 - kiertokanki, linkki 3 - rokkari. Käyrää pitkin liikkuva piste M S kuvaa liikeradan . Jotkut liikeradat voidaan toistaa vipumekanismien avulla teoreettisesti tarkasti, toiset - suunnilleen, käytännössä riittävällä tarkkuudella.
Tarkasteltavaa mekanismia, jota kutsutaan symmetriseksi Chebyshev-mekanismiksi, käytetään usein pyöreänä ohjausmekanismina, jossa AB = BC = BM = 1. Esitetyillä suhteilla

Riisi. 1.3 Kampi-keinumekanismi
piste M kiertokangas AB kuvaa akselin suhteen symmetristä liikerataa n - s . Symmetria-akselin kaltevuuskulma keskipisteen linjaan CO määrään: РМСО = π - Ω / 2. Osa pisteen M liikeradalta on ympyrän kaari, jonka säde on O 1 M, jota voidaan käyttää mekanismeissa, joissa lähtölinkki pysäytetään.
Toinen esimerkki nelilinkistä on laajalle levinnyt tekniikka liukukammen mekanismi (Riisi. 1.4 ).

Riisi. 1.4 Kampi-liukumekanismi
Tässä mekanismissa keinuvarren sijasta on asennettu liukusäädin, joka liikkuu kiinteässä ohjaimessa. Tätä kampimekanismia käytetään mäntämoottoreissa, pumpuissa, kompressoreissa jne. Jos epäkeskisyys e on yhtä suuri kuin nolla, niin saamme keskimmäisen kampi-liukumekanismin tai aksiaalisen mekanismin. klo e nollasta poikkeavaa kampi-liukumekanismia kutsutaan ei-keski- tai deaksiaaliksi. Tässä kammen OA pyöriminen kiertokangen AB läpi muunnetaan liukusäätimen edestakaisin liikkeeksi. Liukusäätimen luonnollisesti ääriasennot , on, kun kampi ja kiertokanki ovat samalla linjalla.
Jos tarkasteltavassa mekanismissa korvaamme kiinteän ohjaimen liikkuvalla, jota kutsutaan kulissien taakse, saamme neljän lenkin keinumekanismi rocker kiven kanssa. Esimerkki tällaisesta mekanismista on höylän keinumekanismi ( Kuva 1.5 ). Kampi 1 , pyörii akselin ympäri keinuvivun läpi 2 tekee kulissien takaa 3 tehdä heiluttavaa liikettä. Tässä tapauksessa keinuvipu liikkuu edestakaisin suhteessa keinuun.

Riisi. 1.5 Neljän lenkin keinumekanismi
Kulissien takaosan ääriasennot ovat kampi kohtisuorassa siihen nähden. Tällaisia asentoja on helppo rakentaa: piirretään ympyrä, jonka säde on yhtä suuri kuin kammen pituus (pisteen liikerata) A), ja tangentit piirretään kulissien kiertoakselilta.
Siten linkit voivat tehdä progressiivinen , pyörivä tai monimutkainen liikettä.
1. Kampi-liukumekanismi.
a) keskellä (kuvio 1);
b) off-axis (deoksi) (kuvio 2);
e - epäkeskisyys
Riisi. 2
1-kampi, koska linkki tekee täydellisen kierroksen akselinsa ympäri;
2-tanko, jota ei ole kytketty telineeseen, tekee tasaisen liikkeen;
3-liukukappale (mäntä), suorittaa translaatioliikkeen;
1 - kampi;
2 - kulissien takana oleva kivi (holkki) yhdessä tähden 1 kanssa tekee täydellisen kierroksen A:n ympäri (w1 ja w2 ovat samat) ja liikkuu myös tähteä 3 pitkin, jolloin se pyörii;
3 - rokkari (kohtaus).
4. Hydraulisylinteri
(kinemaattisesti samanlainen kuin keinumekanismi).
Suunnitteluprosessin aikana suunnittelija ratkaisee kaksi ongelmaa:
· analyysi(tutkii valmis mekanismi);
· synteesi(uusi mekanismi suunnitellaan vaadittujen parametrien mukaisesti);
Mekanismin rakenneanalyysi.
Käsitteet kinemaattisista pareista ja niiden luokittelusta.
Kaksi kiinteästi toisiinsa kytkettyä linkkiä muodostavat kinemaattisen parin. Kaikki kinemaattiset parit ovat kahden itsenäisen luokituksen alaisia:
1. Parit ovat korkeampia tai pienempiä:
a. Korkeammat parit ovat pareja, joissa kosketus tapahtuu linjaa pitkin.
b. Alemmat parit ovat pareja, joissa kosketus tapahtuu pintaa pitkin.
2. Kaikki parit on jaettu viiteen luokkaan kunkin linkin liikkuvuuteen kohdistuvien sidosten lukumäärän mukaan. Vapausasteiden lukumäärä on merkitty . Määrättyjen yhteyksien lukumäärä on merkitty . Tässä tapauksessa liikkuvuusasteiden lukumäärä voidaan määrittää kaavalla: .
a. Ensimmäisen luokan pari: ; .
b. Toisen luokan pari: ; .
c. Kolmannen luokan pari: ; .
d. Neljännen luokan pari: ; .
e. Viidennen luokan pariskunta: ; .
Esimerkkejä pariluokituksesta:
Harkitse kinemaattista paria "ruuvi-mutteri". Tämän parin liikkuvuusasteiden lukumäärä on 1 ja asetettujen sidosten lukumäärä on 5. Tämä pari on viidennen luokan pari, vain yksi liiketyyppi ruuville tai mutterille voidaan valita vapaasti, ja toinen liike on mukana.
Kinemaattinen ketju– eri luokkien kinemaattisten parien yhdistämät linkit.
Kinemaattiset ketjut ovat tilallisia ja litteitä.
Avaruuskinemaattiset ketjut- ketjut, joiden lenkit liikkuvat eri tasoissa.
Litteät kinemaattiset ketjut- ketjut, joiden lenkit liikkuvat yhdessä tai yhdensuuntaisessa tasossa.
Käsitteet kinemaattisten ketjujen ja mekanismien liikkuvuusasteesta.
Avaruudessa vapaasti kelluvien linkkien määrä on merkitty . Linkkien osalta liikkuvuuden aste voidaan määrittää kaavalla: . Muodostamme näistä linkeistä kinemaattisen ketjun, joka yhdistää linkit toisiinsa eri luokkien pareina. Eri luokkien parien lukumäärä on merkitty , jossa on luokka, eli: on ensimmäisen luokan parien lukumäärä, jossa on , ja ; - toisen luokan parien lukumäärä, jossa on , ja ; - kolmannen luokan parien lukumäärä, jossa on , ja ; - neljännen luokan parien lukumäärä, jossa on , ja ; - viidennen luokan parien lukumäärä, joille , ja . Muodostuneen kinemaattisen ketjun liikkuvuusaste voidaan määrittää kaavalla: .
Muodostamme mekanismin kinemaattisesta ketjusta. Yksi mekanismin pääominaisuuksista on telineen (kotelo, pohja), jonka ympärillä loput linkit liikkuvat johtavan linkin (linkkien) vaikutuksesta.
Mekanismin liikkuvuusaste merkitään yleensä nimellä. Muutamme yhden kinemaattisen ketjun lenkeistä telineeseen, eli otamme siitä pois kaikki kuusi liikkuvuusastetta, sitten: - Somov-Malyshev-kaava.
Tasaisessa järjestelmässä vapausasteiden enimmäismäärä on kaksi. Siksi litteän kineettisen ketjun liikkuvuusaste voidaan määrittää seuraavalla kaavalla: . Litteän mekanismin liikkuvuusaste määräytyy Chebyshev-kaavan avulla: , jossa on liikkuvien linkkien lukumäärä. Käyttämällä korkeamman ja alemman kinemaattisen parin määritelmää Tšebyševin kaava voidaan kirjoittaa seuraavasti: .
Esimerkki liikkuvuusasteen määrittämisestä:
Mekanismien luokittelu
Mekanismien tyyppejä ja tyyppejä on tuhansissa, joten niiden luokittelu on tarpeen, jotta voidaan valita yksi tai toinen mekanismi suuresta määrästä olemassa olevia, sekä syntetisoida mekanismi.
Ei ole olemassa yleismaailmallista luokitusta, mutta 3 luokitustyyppiä ovat yleisimpiä:
1) toimiva. Teknologisen prosessin periaatteen mukaan mekanismit jaetaan mekanismeihin: leikkuutyökalun saattaminen liikkeelle; virtalähde, lastaus, osien poisto; kuljetus, jne.;
2) rakenteellisia ja rakentavia. Se mahdollistaa mekanismien erottamisen sekä suunnitteluominaisuuksien että rakenteellisten periaatteiden mukaan. Tämä tyyppi sisältää mekanismeja: kampi-liuku; rokkari; vipu-hammastettu; nokkavipu jne.;
3) rakenteellinen. Yksinkertaista, järkevää, joka liittyy läheisesti mekanismin muodostumiseen, sen rakenteeseen, kinemaattisten ja voimaanalyysien menetelmiin, ehdotti L.V. Assur vuonna 1916 ja perustuu periaatteeseen rakentaa mekanismi kerrostamalla (kiinnittämällä) kinemaattisia ketjuja (rakenneryhmien muodossa) alkuperäiseen mekanismiin. Tämän luokituksen mukaan mikä tahansa mekanismi voidaan saada yksinkertaisemmasta kiinnittämällä jälkimmäiseen kinemaattisia ketjuja vapausasteiden lukumäärällä W= 0, joita kutsutaan rakenneryhmiksi tai Assur-ryhmiksi.
Venäjän federaation liikenneministeriö
Liittovaltion meri- ja jokiliikennevirasto
Krimin haara
FGBOU VPO
"Amiraali F.F. Ushakovin mukaan nimetty valtion merenkulkuyliopisto"
Osasto "Perustieteet"
Mekanismien ja koneiden teoria
kurssiprojekti
Litteä kytkentä
Selittävä huomautus
Projektin on kehittänyt: Art. gr. _
_____________________________
Projektin johtaja: prof. Burov V.S.
Sevastopol 2012
1. Tasomaisen liitoksen kinemaattinen analyysi .............................................................................................. 3
1.1. Liikkeen rakenne 12 asennossa.............................................................................................................. 3
1.2. Suunnitelmien rakentaminen hetkellisille nopeuksille.............................................................................................................. 4
1.3. Rakennussuunnitelmat hetkellisiä kiihdytyksiä varten................................................................................................... 5
1.4. Siirtymäkaavion rakentaminen................................................................................................................. 8
1.5. Nopeuskaavion piirtäminen................................................................................................................................... 9
1.6. Kiihtyvyyskaavion rakentaminen................................................................................................................. 9
2. Tasaisen liitoksen voimaanalyysi ................................................................................................................ 10
2.1. Mekanismin lenkkeihin vaikuttavien kuormien määrittäminen................................................................... 10
2.2. Linkkiryhmän 7, 6 voimalaskenta .............................................................................................................................. 12
2.3. Linkkiryhmän 4, 5 voimalaskenta .............................................................................................................. 13
2.4. Linkkiryhmän 2, 3 voimalaskenta .............................................................................................................. 14
2.5. Johtavan linkin voimalaskenta............................................................................................................................. 15
2.6. Johtavan linkin voimalaskenta Žukovskin menetelmällä ................................................................................ 15
3. Vaihteistomekanismin synteesi.............................................................................................................................. 16
3.1. Vaihteistomekanismin geometristen parametrien määrittäminen................................................... 16
3.2. Lineaaristen nopeuksien suunnitelman rakentaminen................................................................................................................ 19
3.3. Suunnitelman laatiminen kulmanopeuksista.............................................................................................................................. 20
4. Nokkamekanismin synteesi ................................................................................................................................... 21
4.1. Kiihtyvyyksien analogien piirtäminen.................................................................................................................. 21
4.2. Analogisten nopeuksien piirtäminen................................................................................................................ 22
4.3. Siirtymäanalogien piirtäminen ................................................................................................... 22
4.4 Nokan pienimmän alkusäteen löytäminen................................................................................................ 22
4.5. Kameraprofiilin rakentaminen.................................................................................................................................. 23
Viitteet ................................................................................................................................................... 24
1. Litteän vipumekanismin kinemaattinen analyysi.

Annettu:
Litteän vipumekanismin kaavio.
Mekanismin geometriset parametrit:
l OA \u003d 125 mm;
l AB \u003d 325 mm;
l AC \u003d 150 mm;
On tarpeen rakentaa mekanismi 12 asentoon, suunnitelmat hetkellisille nopeuksille kullekin näistä asennoista, suunnitelmat hetkellisistä kiihdytyksistä mihin tahansa 2 asemaan sekä kaaviot siirtymistä, nopeuksista ja kiihtyvyydestä.
1.1 Litteän vipumekanismin 12-asentoinen rakenne.
Piirrä ympyrä, jonka säde on OA. Sitten mittakaavatekijä on:

Valitsemme mekanismin alkuasennon ja jaamme tästä pisteestä ympyrän 12 yhtä suureen osaan. Yhdistämme ympyrän keskipisteen (piste O) saatuihin pisteisiin. Nämä ovat ensimmäisen linkin 12 sijaintia.
Piirrämme t. O:n kautta vaakasuuntaisen suoran X-X. Sitten rakennamme säteeltään AB ympyröitä, joiden keskipisteet ovat aiemmin saaduissa pisteissä. Yhdistämme pisteet B 0, B 1, B 2, ..., B 12 (ympyröiden leikkaus linjan X-X kanssa) pisteisiin 0, 1, 2, ..., 12. Saadaan 12 toisen linkin paikkaa.
t. O:sta siirrämme segmenttiä b ylöspäin. Saamme pisteen O 1 . Siitä piirrämme ympyrän säteellä O 1 D.
Janoilla AB 0, AB 1, AB 2, ..., AB 12 pisteestä A syrjäytetään etäisyys, joka on yhtä suuri kuin AC. Saamme pisteet С 0 , С 1 , С 2 , …, С 12 . Niiden läpi piirretään kaaria, joiden säde on DC, kunnes ne leikkaavat ympyrän, jonka keskipiste on piste O 1 . Yhdistämme pisteet C 0, C 1, C 2, ..., C 12 vastaanotettujen kanssa. Nämä ovat kolmannen linkin 12 paikkaa.
Pisteet D 0, D 1, D 2, ..., D 12 on yhdistetty t. O 1:een. Neljännestä linkistä saamme 12 paikkaa.
Ympyrän korkeimmasta pisteestä, jonka keskipiste on pisteessä O1, siirrämme vaakasuoran segmentin, joka on yhtä suuri kuin a. Sen pään läpi piirretään pystysuora viiva Y-Y. Edelleen pisteistä D 0 , D 1 , D 2 , ..., D 12 rakennamme kaaria, joiden säde on DE tuloksena olevan suoran leikkauspisteeseen. Yhdistämme nämä pisteet uusiin pisteisiin. Nämä ovat viidennen linkin 12 paikkaa.
Kun otetaan huomioon mittakaavatekijä , linkkien mitat ovat:
AB \u003d l AB * \u003d 325 * 0,005 \u003d 1,625 m;
AC \u003d l AC * \u003d 150 * 0,005 \u003d 0,75 m;
CD = 1 CD * = 220 * 0,005 = 1,1 m;
Noin 1 D \u003d l O1 D * \u003d 150 * 0,005 \u003d 0,75 m;
DE \u003d l DE * \u003d 200 * 0,005 \u003d 1 m;
a 1 \u003d a * \u003d 200 * 0,005 \u003d 1 m;
b 1 \u003d b * \u003d 200 * 0,005 \u003d 1 m.
1.2 Suunnitelmien rakentaminen hetkellisille nopeuksille.
Nopeussuunnitelman rakentamiseen mekanismille on olemassa erilaisia menetelmiä, joista yleisin on vektoriyhtälöiden menetelmä.
Pisteiden O ja O 1 nopeudet ovat yhtä suuret kuin nolla, joten nopeussuunnitelmassa ne osuvat yhteen nopeussuunnitelman p navan kanssa.
Sijainti 0:


Mutta t.B:n nopeus osui napaan p, joten V B = 0, mikä tarkoittaa, että myös kaikkien muiden pisteiden nopeudet ovat samat kuin navan ja ovat nolla.
Hetkellisen nopeuden suunnitelmat rakennetaan samalla tavalla paikoille 3, 6, 9, 12.
Asento 1:
Nopeus t.A saadaan yhtälöstä:

Nopeusvektorin t.A toimintalinja on kohtisuorassa linkkiin OA nähden ja itse on suunnattu linkin pyörimissuuntaan.
Hetkennopeuksien suunnitelmaan rakennetaan segmentti (pa) ┴ OA, sen pituus (pa) = 45mm. Sitten skaalauskerroin on:

Nopeus t.V saadaan yhtälöistä:
 , jossa V BA ┴ VA ja V BB0 ║X-X
, jossa V BA ┴ VA ja V BB0 ║X-X
Nopeussuunnitelman t.a:sta rakennetaan suora ┴ linkkiin BC ja t.r:stä vaakasuora suora. Risteyksessä saamme pisteen b. Yhdistämme t.a:n ja t.b:n. Tämä on nopeusvektori t.B (V B).
VB = pb* = 0,04*15,3 = 0,612
T.C:n nopeus määritetään samankaltaisuuslauseen ja kirjainten lukusäännön avulla. Kirjainten lukemisen sääntönä on, että kirjainten kirjoitusjärjestyksen jäykän linkin nopeuksien tai kiihtyvyyksien suunnitelmassa on täsmälleen sama kuin itse linkin kirjainten kirjoitusjärjestys.
Suhteesta:
Voit määrittää segmentin ac pituuden:

Laitamme sivuun segmentin, joka on 19,2 mm t.a:sta, saamme t.s:n, yhdistämme sen napaan, saamme nopeusvektorin t.C (V C).
Nopeus t.D määritetään ratkaisemalla geometrinen yhtälöjärjestelmä:
 , jossa V DC ┴ DC ja V DO 1 ┴ DO 1
, jossa V DC ┴ DC ja V DO 1 ┴ DO 1
Nopeussuunnitelman t.c:stä rakennamme suoran ┴ tasavirtapiiriin ja t.r:stä piirrämme suoran ┴ DO 1. Risteyksessä saamme pisteen d. Yhdistämme t.d napaan, saamme nopeusvektorin t.D (V D).
V D \u003d pd * \u003d 0,04 * 37,4 \u003d 1,496
Löydämme myös nopeuden eli yhtälöjärjestelmän ratkaisusta:
 , jossa V ED ┴ ED ja V EE 0 ║Y-Y
, jossa V ED ┴ ED ja V EE 0 ║Y-Y
Nopeussuunnitelman t.d:stä rakennetaan suora ┴ DE-linkkiin ja t.r:stä pystysuora viiva. Risteyksessä saamme ts. Yhdistämme t.a:n ja t.b:n. Tämä on nopeusvektori t.B (V B).
V E \u003d pe * \u003d 0,04 * 34,7 \u003d 1,388
Samoin suunnitelmat hetkellisille nopeuksille rakennetaan mekanismin 2, 3, 4, 5, 7, 8, 10, 11 asennoille.
1.3 Välittömien kiihtyvyyssuunnitelmien laatiminen.
Pisteiden O ja O 1 kiihtyvyydet ovat nolla, joten kiihtyvyyssuunnitelmassa ne osuvat yhteen kiihtyvyyssuunnitelman navan π kanssa.
Sijainti 0:
Pisteen A kiihtyvyys löytyy:

Rakennamme hetkellisten kiihtyvyyksien suunnitelmaan segmentin πа ║ ОА, jonka pituus (πа)=70 mm. Sitten skaalauskerroin on:


Kiihtyvyyden suunta t.B ja t.A ║ suora X-X, ┴ BA, joten kiihtyvyys t.B osuu yhteen hetkellisen kiihtyvyysvektorin t.A lopun kanssa, mikä tarkoittaa, että mekanismin kaikkien muiden pisteiden kiihtyvyydet osuvat sen kanssa.
Lausuma 7:
Pisteen A kiihtyvyys löytyy:
Rakennamme hetkellisten kiihtyvyyksien suunnitelmaan segmentin πа ║ ОА, jonka pituus (πа)=70 mm.
Pisteen B kiihtyvyys löytyy ratkaisemalla vektoriyhtälö:


Asetamme t.a:sta syrjään segmentin, joka on 21 mm ║ AB, sitten muodostetaan tuloksena olevan vektorin päästä jana ┴ AB ja piirretään vaakasuora viiva navan läpi. Yhdistämällä risteyksen tuska napaan saadaan kiihtyvyysvektori t.V.
Löydämme kiihtyvyyden t.C samankaltaisuuslauseen ja kirjainten lukusäännön avulla:
Siten
Pisteen D kiihtyvyys voidaan löytää ratkaisemalla vektoriyhtälöjärjestelmä:



Asetamme t.s:stä syrjään segmentin, joka on yhtä suuri kuin 14,5 mm ║ DC, sitten muodostuvan vektorin päästä rakennamme segmentin ┴ DC.


Pisteestä π rakennamme segmentin, joka on 1,75 mm ║ O 1 D, ja vedetään sitten suora ┴ O 1 D tuloksena olevan vektorin päähän.
Pisteen E kiihtyvyys voidaan löytää ratkaisemalla vektoriyhtälöjärjestelmä:
![]()

Pisteen E ║ ED kiihtyvyyssuunta, joten vedetään vaakasuora suora viiva navan läpi ja kiihtyvyysvektorin t.D so-päästä rakennetaan segmentti, joka on 1,4 mm ║ ED, sitten vedetään suora ┴ ED saadun vektorin päästä. Yhdistämällä suoran ║ ED ja suoran ┴ ED leikkauspisteen napaan, saadaan pisteen E kiihtyvyysvektori.
1.4 Lähtölinkin siirtymäkaavion rakentaminen.
Lähtölinkin siirtymäkaavio saadaan rakentamalla segmenttejä, jotka on otettu litteän vipumekanismin piirroksesta 12 asennossa, skaalauskerroin huomioon ottaen

1.5 Lähtölinkin nopeuskaavion rakentaminen.
Lähtölinkin nopeuskaavio saadaan graafisen eriyttämisen tuloksena lähtölinkin siirtymäkaavion inkrementaalisella menetelmällä. Tämä menetelmä on pohjimmiltaan sointumenetelmä. Jos vakionapaetäisyys H otetaan yhtä suureksi kuin välin Δt arvo, ei ole tarvetta johtaa säteitä navan П läpi, koska tässä tapauksessa segmentit h i ovat funktion S(t) inkrementtejä välillä Δt.
Toisin sanoen siirtymäkaavioon rakennetaan pystysegmentti ensimmäisestä jaosta kaavion leikkauspisteeseen. Sitten vaakasuora segmentti poistetaan leikkauspisteestä, kunnes se leikkaa seuraavan jaon. Sitten saadusta pisteestä siirretään pystysuora segmentti, kunnes se leikkaa kuvaajan. Tämä toistetaan aikataulun loppuun asti. Tuloksena olevat segmentit rakennetaan nopeuskaavioon skaalauskerroin huomioon ottaen, mutta ei ensimmäisestä jaosta, vaan puoli jakoa aikaisemmin:

1.6 Lähtölinkin kiihtyvyyskaavion rakentaminen.
Se on rakennettu samalla tavalla kuin mekanismin lähtölinkin nopeuskaavio

2. Litteän vipumekanismin voimaanalyysi.
Annettu:
l OA = 125 mm;
l AB = 325 mm;
l AC = 150 mm;
l CD = 220 mm;
l 01 D = 150 mm;
l DE = 200 mm;
Fmax = 6,3 kN;
m K = 25 kg/m;
Kaavio hyödyllisistä vastusvoimista.
On tarpeen määrittää reaktiot kinemaattisina pareina ja tasapainotusmomentti mekanismin tuloakselilla.
2.1 Mekanismin lenkkeihin vaikuttavien kuormien määrittäminen.
Lasketaanpa painovoima. Näiden voimien resultantit sijaitsevat linkkien massakeskuksissa ja suuruudet ovat yhtä suuret:
G 1 \u003d m 1 * g \u003d m K * l OA * g \u003d 25 * 0,125 * 10 \u003d 31,25 H
G 2 \u003d m 2 * g \u003d m K * l B A * g \u003d 25 * 0,325 * 10 \u003d 81,25 H
G 3 \u003d m V * g \u003d 20 * 10 \u003d 200 N
G 4 \u003d m 4 * g \u003d m K * l CD * g \u003d 25 * 0,22 * 10 \u003d 55 H
G 5 \u003d m 5 * g \u003d m K * l O 1D * g \u003d 25 * 0,15 * 10 \u003d 37,5 H
G 6 \u003d m 6 * g \u003d m K * l DE * g \u003d 25 * 0,2 * 10 \u003d 50 H
G 7 \u003d m 7 * g \u003d 15 * 10 \u003d 150 H
Etsitään hyödyllisen vastuksen voima hyödyllisen vastuksen voimien kaavion mukaan. Mekanismin tarkastelussa asennossa tämä voima on yhtä suuri kuin nolla.
Haitallisten vastustusvoimien laskemiseen ei ole tietoa, joten emme ota niitä huomioon.
Inertiakuormien määrittämiseen vaaditaan linkkien ja joidenkin pisteiden kiihdytykset, joten käytämme kiihtyvyyssuunnitelmaa mekanismin harkittuun paikkaan.
Määritetään linkkien hitausvoimat. Johtava lenkki on pääsääntöisesti tasapainotettu, eli sen massakeskipiste sijaitsee pyörimisakselilla ja inertiavoimien resultantti on nolla. Mekanismin muiden linkkien hitausvoimien määrittämiseksi määritämme ensin niiden massakeskipisteiden kiihtyvyydet:
ja S2 \u003d * πS 2 \u003d 0,4 * 58,5 \u003d 23,4 m/s 2
ja B \u003d * πb \u003d 0,4 * 64,9 \u003d 25,96 m/s 2
ja S4 \u003d * πS 4 \u003d 0,4 * 65,7 \u003d 26,28 m/s 2
ja D \u003d * πd \u003d 0,4 * 78,8 \u003d 31,52 m/s 2
ja S6 \u003d * πS 6 \u003d 0,4 * 76,1 \u003d 30,44 m/s 2
ja E \u003d * πe \u003d 0,4 * 74,5 \u003d 29,8 m/s 2
Määritellään nyt hitausvoimat:
F I2 \u003d m 2 * a S2 \u003d 8,125 * 23,4 \u003d 190 H
F I3 \u003d m 3 * a B \u003d 20 * 25,96 \u003d 519 H
F I4 \u003d m 4 * a S4 \u003d 5,5 * 26,28 \u003d 145 H
F I6 \u003d m 6 * a S6 \u003d 5 * 30,44 \u003d 152 H
F I7 \u003d m 7 * a E \u003d 15 * 29,8 \u003d 447 H
Hitausvoimien momenttien määrittämiseksi on tarpeen löytää linkkien massojen hitausmomentit ja niiden kulmakiihtyvyydet. Linkkien 3 ja 7 kohdalla massat keskittyvät pisteisiin, linkissä 1 ja kulmakiihtyvyys on nolla, joten tämän linkin hitausmomentit ovat nolla.
Oletetaan, että linkkien 2, 4 ja 6 massajakauma on tasainen niiden pituuksilla. Sitten linkkien inertia pisteisiin S i nähden on yhtä suuri:
J S 2 \u003d m 2 * l 2 2 / 12 \u003d 8,125 * 0,325 2 / 12 \u003d 0,0715 kg * m 2
J S 4 \u003d m 4 * l 4 2 / 12 \u003d 5,5 * 0,22 2 / 12 \u003d 0,0222 kg * m 2
J S 6 \u003d m 6 * l 6 2 / 12 \u003d 5 * 0,2 2 / 12 \u003d 0,0167 kg * m 2
Linkkien 2, 4, 5 ja 6 kulmakiihtyvyydet määräytyvät suhteellisilla tangentiaalikiihtyvyyksillä, joten:



Etsitään 2, 4, 6 linkin hitausmomentit:
M I2 \u003d J S 2 * \u003d 0,0715 * 82,22 \u003d 5,88 Nm
M I4 \u003d J S 4 * \u003d 0,0222 * 42,73 \u003d 0,95 Nm
M I6 \u003d J S 4 * \u003d 0,0167 * 35,6 \u003d 0,59 Nm
2.2 Linkkiryhmän 6, 7 voimalaskenta.
Valitaan mekanismista ryhmä lenkkejä 6, 7, järjestetään kaikki todelliset kuormat ja voimat ja hitausvoimien momentit.
Korvataan toiminto tarkasteltavassa poistettujen linkkien ryhmässä voimilla. Eli liukusäätimeen 7 vaikuttaa telineen sivulta tuleva voima - liukusäätimen ohjain. Kitkan puuttuessa vuorovaikutusvoima on suunnattu kohtisuoraan kosketuspintoihin nähden, eli kohtisuoraan liukusäätimen liikesuuntaan nähden, eikä sitä vielä tunneta vasemmalle tai oikealle, joten suuntaamme tämän voiman ensin oikealle. Jos laskelmien jälkeen käy ilmi, että se on negatiivinen, on tarpeen muuttaa suunta päinvastaiseksi.
Nimitysindeksiin laitetaan kaksi numeroa: ensimmäinen osoittaa, mistä linkistä voima vaikuttaa, ja toinen osoittaa, mihin linkkiin tämä voima vaikuttaa.
Pisteessä D lenkistä 5, lenkkiin 6 vaikuttaa voima R 56 . Tämän voiman suuruutta tai suuntaa ei tunneta, joten määritämme sen kahdella komponentilla: suuntaamme yhden linkkiä pitkin ja kutsumme sitä normaalikomponentiksi ja toista kohtisuoraan linkkiin ja kutsumme sitä tangentiaalikomponentiksi. näiden komponenttien alustava suunta valitaan mielivaltaisesti, ja todellinen suunta määräytyy voiman etumerkillä laskelmien jälkeen.
Hyödyllisen vastuksen voima vaikuttaa myös liukusäätimeen E, mutta se on yhtä suuri kuin nolla.
Sijoitetaan kaikki luetellut voimat valittuun linkkiryhmään ja määritetään tuntemattomat reaktiot kinemaattisissa pareissa E, D - RE ja R 56 .
Ensin määritetään voiman R 56 tangentiaalinen komponentti linkin 6 tasapainoehdosta. Vertaamalla nollaan voimien momenttien summan suhteessa pisteeseen E saadaan:

Hitausvoimien momentti on jaettava, koska linkit on esitetty asteikolla ja niiden piirroksesta otettuja arvoja käytetään laskelmissa.
Voiman R 56 ja voiman RE normaalikomponentti löydetään graafisella menetelmällä linkkien 6, 7 ryhmälle rakennetusta vektoripolygonista. Tiedetään, että voimatasapainossa voimavektoreista muodostuva polygoni on suljettava:
Koska voiman normaalikomponentin R 56 ja R E toimintalinjojen suunnat tunnetaan, niin rakentamalla aiemmin avoin monikulmio tunnetuista voimavektoreista, se voidaan sulkea, jos vedetään suoria viivoja ensimmäisen ja viimeisen vektorin alun läpi, yhdensuuntaisesti haluttujen voimien suuntien kanssa. Näiden viivojen leikkauspiste määrää haluttujen vektorien suuruuden ja niiden todelliset suunnat.
Rakenteista voidaan nähdä, että voiman R 76 suunta on n:stä m:iin ja voiman R 67 on m:stä n:ään.
R 56 \u003d * \u003d 1/4 * 209,7 \u003d 52,43 N
R E \u003d * \u003d 1/4 * 69,3 \u003d 17,33 N
2.3 Linkkiryhmän voimalaskenta 5.4.
Valitaan mekanismista linkkien ryhmä 4, 5, järjestetään kaikki todelliset kuormat ja voimat ja hitausvoimien momentit, hylättyjen linkkien reaktiot. Pisteessä D vaikuttaa voima R 65, joka on yhtä suuri kuin R 56 ja on suunnattu sitä vastapäätä.
Tuntemattomia ovat: 4 ja 2 linkin vuorovaikutusvoima, 5 linkin ja telineen vuorovaikutusvoima.
Pisteessä C linkistä 2, lenkkiin 4 vaikuttaa voima R 24 . Tämän voiman suuruutta tai suuntaa ei tunneta, joten määritämme sen kahdella komponentilla: suuntaamme yhden linkkiä pitkin ja kutsumme sitä normaalikomponentiksi ja toista kohtisuoraan linkkiin ja kutsumme sitä tangentiaalikomponentiksi. näiden komponenttien alustava suunta valitaan mielivaltaisesti, ja todellinen suunta määräytyy voiman etumerkillä laskelmien jälkeen.
Ensin määritetään voiman R 24 tangentiaalinen komponentti linkin 4 tasapainoehdosta. Yhdistäen pisteen D voimamomenttien summan nollaan saamme:

Voiman R 24 ja voiman R O 1 normaalikomponentti löydetään graafisella menetelmällä linkkien 5, 4 ryhmälle rakennetusta vektoripolygonista. Tiedetään, että voimatasapainossa voimavektoreista muodostuva polygoni on suljettava:
Määritetään reaktioiden suuruus kinemaattisina pareina:
R 24 \u003d * \u003d 1 * 26,6 \u003d 26,6 N
R O 1 \u003d * \u003d 1 * 276,6 \u003d 276,6 N
2.4 Linkkiryhmän 2, 3 voimalaskenta.
Valitaan mekanismista linkkien ryhmä 2, 3, järjestetään kaikki todelliset kuormat ja voimat ja hitausvoimien momentit, pudonneiden lenkkien reaktiot. Pisteessä C vaikuttaa voima R 24, joka on yhtä suuri kuin R 24 ja on suunnattu sitä vastapäätä.
Tuntemattomia ovat: 1 ja 2 linkin vuorovaikutusvoima, 2 linkin vuorovaikutusvoima ja liukusäädin.
Pisteessä C linkistä 1, lenkkiin 2 vaikuttaa voima R 12 . Tämän voiman suuruutta tai suuntaa ei tunneta, joten määritämme sen kahdella komponentilla: suuntaamme yhden linkkiä pitkin ja kutsumme sitä normaalikomponentiksi ja toista kohtisuoraan linkkiin ja kutsumme sitä tangentiaalikomponentiksi. näiden komponenttien alustava suunta valitaan mielivaltaisesti, ja todellinen suunta määräytyy voiman etumerkillä laskelmien jälkeen.
Ensin määritetään voiman R 12 tangentiaalinen komponentti linkin 2 tasapainoehdosta. Vertaamalla pisteen A voimien momenttien summan nollaan, saadaan:

Voiman R 12 ja voiman R B normaalikomponentti löydetään graafisella menetelmällä linkkien 2, 3 ryhmälle rakennetusta vektoripolygonista. Tiedetään, että voimatasapainolla voimavektoreista muodostuva polygoni on suljettava:
Koska voiman normaalikomponentin R 24 ja R O 1 toimintalinjojen suunnat ovat tiedossa, niin rakentamalla aiemmin avoin monikulmio tunnetuista voimavektoreista, se voidaan sulkea, jos vedetään suoria viivoja ensimmäisen ja viimeisen vektorin alun läpi, yhdensuuntaisesti haluttujen voimien suuntien kanssa. Näiden viivojen leikkauspiste määrää haluttujen vektorien suuruuden ja niiden todelliset suunnat.
Määritetään reaktioiden suuruus kinemaattisina pareina:
R 12 \u003d * \u003d 1/2 * 377,8 \u003d 188,9 N
R B \u003d * \u003d 1/2 * 55,4 \u003d 27,7 N
2.5 Johtavan lenkin teholaskenta.
Etulenkki on yleensä tasapainotettu, eli sen massakeskipiste on pyörimisakselilla. Tämä edellyttää, että kammen OA jatkeeseen asennetun vastapainon hitausvoima on yhtä suuri kuin OA-linkin hitausvoima:

m \u003d M 1 / l OA \u003d 3,125 / 0,125 \u003d 25 kg - massa pituusyksikköä kohti.
Tästä on mahdollista määrittää vastapainon massa m 1, kun otetaan huomioon sen etäisyys r 1 pyörimisakselista. Kun r 1 = 0,5 * l m 1 = M 1 (OA-linkin massa).
Pisteessä A nivelestä 1 vaikuttaa voima R 21, jonka momentti suhteessa pisteeseen O on yhtä suuri kuin tasapainotusmomentti.
Tässä tapauksessa pisteessä O tapahtuu reaktio R O, joka on yhtä suuri ja päinvastainen kuin voima R 21 . Jos linkin painovoima on verrannollinen voiman R 21 kanssa, niin se on otettava huomioon määritettäessä tuen O reaktiota, joka saadaan vektoriyhtälöstä:
![]()
2.6 Johtavan linkin teholaskenta Zhukovskin menetelmällä.
Mekanismin hetkellisten nopeuksien suunnitelmaan, jota on kierretty 90 0 pyörimissuunnassa, sovelletaan kaikki mekanismiin vaikuttavat voimat ja laaditaan yhtälö vaikuttavien voimien momenteille suhteessa napaan.
Vastaukset koekysymyksiin TMM:ssä
Moskovan valtionyliopisto
Tekninen ekologia
Koneiden ja mekanismien teoria (TMM)
Tenttikysymykset
päiväosaston opintoryhmille.
1. Mekanismien rakenne
1.1. Kone ja mekanismi. Mekanismien luokittelu toiminnallisten ja rakenteellisten ja rakenteellisten ominaisuuksien mukaan.
VASTAUS: Akateemikko Artobolevskyn määritelmän mukaan:
Auto- on olemassa laitteita, jotka ihminen on luonut tutkimaan ja käyttämään luonnonlakeja fyysisen ja henkisen työn helpottamiseksi, sen tuottavuuden lisäämiseksi korvaamalla se osittain tai kokonaan työssä ja fysiologisissa toiminnoissa.
Mekanismi- runkojärjestelmä, joka on suunniteltu muuntamaan yhden tai useamman kappaleen liike muiden jäykkien kappaleiden vaadituksi liikkeeksi. Jos nestemäiset tai kaasumaiset kappaleet ovat mukana liikkeen muuttamisessa, mekanismia kutsutaan hydrauliseksi tai pneumaattiseksi. Yleensä mekanismissa on yksi tulolinkki, joka vastaanottaa liikettä moottorista, ja yksi lähtölinkki, joka on kytketty työkappaleeseen tai instrumentin ilmaisimeen. Mekanismit ovat tasaisia ja tilallisia.
Koneiden luokittelu toiminnallisen tarkoituksen mukaan:
Energia (moottorit, generaattorit).
Työntekijät (kuljetus, teknologia).
Tiedot (ohjaus ja hallinta, matemaattinen).
Kyberneettinen.
Koneet koostuvat mekanismeista.
Toiminnallisen luokituksen mukaan niitä on:
Moottoreiden ja muuntimien mekanismit;
Toimeenpanomekanismit;
siirtomekanismit;
Ohjaus-, säätö-, säätömekanismit;
Ruokinta-, ruokinta-, lajittelumekanismit;
Laskenta-, punnitus- ja pakkausmekanismit.
Niiden mekaanisten parametrien rakenteen ja laskentamenetelmien suhteen on paljon yhteistä.
Rakenteellinen-konstruktiivinen luokitus:
Vipumekanismit;
Nokkamekanismit;
Vaihteistomekanismit (koostuvat hammaspyöristä);
Yhdistetty.
1.2. Vipumekanismit. Hyödyt ja haitat. Sovellus teknisissä laitteissa.
VASTAUS: Vipumekanismit koostuvat rungoista, jotka on valmistettu vipujen, tankojen muodossa. Nämä tangot tai vivut ovat vuorovaikutuksessa toistensa kanssa pitkin pintaa. Siksi vipumekanismit pystyvät havaitsemaan ja välittämään merkittäviä voimia.
Niitä käytetään tärkeimpinä teknisinä laitteina. Vaaditun liikelain toistaminen tällaisten mekanismien avulla on kuitenkin hyvin rajallista.
1.3. Nokkamekanismit. Nokkamekanismien tyypit. Hyödyt ja haitat. Päätarkoitus.
VASTAUS: Nokkamekanismi koostuu kaarevasta rungosta, jonka liikkeen luonne määrää koko mekanismin liikkeen. Suurin etu on, että muuttamatta linkkien määrää mikä tahansa liikelaki voidaan toistaa muuttamalla nokan profiilia. Mutta nokkamekanismissa on linkkejä, jotka koskettavat jossakin pisteessä tai linjaa pitkin, mikä rajoittaa merkittävästi siirretyn voiman määrää erittäin korkeiden ominaispaineiden ilmaantumisen vuoksi. Siksi nokkamekanismeja käytetään pääasiassa keinona automatisoida teknistä prosessia, jossa nokka toimii kovana ohjelmakantajana.
1.4. vaihdemekanismit. Vaihteistomekanismien tyypit. Päätarkoitus.
VASTAUS: vaihdemekanismi kutsutaan mekanismiksi, joka sisältää hammaspyörät (runko, jossa on suljettu ulkonemien tai hampaiden järjestelmä).
Vaihteistomekanismeja käytetään pääasiassa pyörivän liikkeen välittämiseen tarvittaessa muuttamalla kulmanopeuden suuruutta ja suuntaa.
Näiden mekanismien liikkeen välitys tapahtuu erityisesti profiloitujen hampaiden sivuttaispaineen ansiosta. Tietyn kulmanopeuksien suhteen toistamiseksi hammasprofiilien on oltava keskenään taipuvia, eli yhden pyörän hammasprofiilin tulee vastata toisen pyörän tarkkaan määriteltyä hammasprofiilia. Hammasprofiilit voidaan rajata erilaisilla käyrillä, mutta yleisimpiä ovat mekanismit, joissa on evoluutiohammasprofiili, eli hammas on ääriviivattu evoluutiota pitkin.
Kulmanopeuksien vakiosuhteen toistamiseksi käytetään mekanismeja, joissa on pyöreät vaihteet.
On litteitä ja spatiaalisia mekanismeja. Tasaisessa mekanismissa akselit ovat yhdensuuntaiset, kun taas tilallisessa ne leikkaavat tai risteävät. Litteässä mekanismissa pyörät ovat sylinterimäisiä, tila-tilassa kartiomaisia (jos akselit leikkaavat).
Erittäin vaihteleva. Jotkut niistä ovat yhdistelmä vain kiinteitä kappaleita, toiset koostuvat hydraulisista, pneumaattisista kappaleista tai sähköisistä, magneettisista ja muista laitteista. Vastaavasti tällaisia mekanismeja kutsutaan hydraulisiksi, pneumaattisiksi, sähköisiksi jne.
Toiminnallisen tarkoituksensa kannalta mekanismit jaetaan yleensä seuraaviin tyyppeihin:
Moottorimekanismit muuttavat erityyppistä energiaa mekaaniseksi työksi (esimerkiksi polttomoottorien, höyrykoneen, sähkömoottorin, turbiinin mekanismit jne.).
Muuntajien (generaattoreiden) mekanismit muuttavat mekaanisen työn muuntyyppiseksi energiaksi (esimerkiksi pumppujen, kompressorien, hydraulikäyttöjen mekanismit jne.).
Voimansiirtomekanismin (käytön) tehtävänä on siirtää liike moottorista teknologiseen koneeseen tai toimilaitteeseen, muuttamalla tämä liike tämän teknisen koneen tai toimilaitteen toiminnan kannalta välttämättömäksi.
Toimilaite on mekanismi, joka vaikuttaa suoraan prosessoituun ympäristöön tai kohteeseen. Sen tehtävänä on muuttaa käsiteltävän väliaineen tai esineen muotoa, tilaa, sijaintia ja ominaisuuksia (esimerkiksi metallintyöstökoneiden, puristimien, kuljettimien, valssaamojen, kaivinkoneiden, nostokoneiden jne. mekanismit).
Ohjaus-, ohjaus- ja säätömekanismit ovat erilaisia mekanismeja ja laitteita, joilla varmistetaan ja ohjataan käsiteltyjen esineiden mittoja (esimerkiksi mittausmekanismit mittojen, paineen, nestetasojen säätämiseksi; säätimet, jotka reagoivat koneen pääakselin kulmanopeuden poikkeamaan ja asettavat tämän akselin määritellyn nopeuden; mekanismi, joka säätelee telojen välisen etäisyyden pysyvyyttä jne.).
Käsiteltyjen välineiden ja esineiden kuljetus-, syöttö- ja lajittelumekanismeja ovat ruuviruuvimekanismeja, kaavin- ja kauhahissit bulkkimateriaalien kuljetukseen ja toimittamiseen, mekanismit kappaleaihioiden lastaussuppiloihin, mekanismit valmiiden tuotteiden lajitteluun koon, painon, kokoonpanon jne. mukaan.
Valmiiden tuotteiden automaattisen laskemisen, punnituksen ja pakkaamisen mekanismeja käytetään monissa koneissa, jotka tuottavat pääasiassa massakappaletuotteita. On pidettävä mielessä, että nämä mekanismit voivat olla myös toimilaitteita, jos ne sisältyvät tähän tarkoitukseen suunniteltuihin erikoiskoneisiin.
Tämä luokittelu näyttää vain erilaisia mekanismien toiminnallisia sovelluksia, joita voidaan merkittävästi laajentaa. Usein eri toimintojen suorittamiseen käytetään kuitenkin mekanismeja, joilla on sama rakenne, kinematiikka ja dynamiikka. Siksi mekanismien ja koneiden teorian opiskelua varten nostetaan esiin mekanismeja, joilla on yhteiset menetelmät synteesiin ja työn analysointiin niiden toiminnallisesta tarkoituksesta riippumatta. Tästä näkökulmasta erotetaan seuraavan tyyppiset mekanismit.