Kinnitusseadmete tüübid ja nende arvutamine. Masinaehituse õpikud Nukkmehhanismid. Nukkmehhanismide tüübid. Eelised ja miinused. Peamine eesmärk
VENEMAA FÖDERAATSIOONI FÖDERAALNE HARIDUSAMET
RIIKLIK KÕRGHARIDUSASUTUS
"TÜUMENI RIIGI ÕLI- JA GAASIÜLIKOOL"
TRANSPORDI INSTITUUT
Tool Masinaosad
ÜLEVAADE MEHHANISMI PEAMISEST TÜÜPIDEST
METOODILISED JUHISED
To praktiline treening Kõrval Mehhanismide ja masinate teooriad erialade üliõpilastele NR-130503 PST-130501 NB-130504 01, MSO- 190207
täis- ja osakoormusega täis- ja vähendatud õppevormid
Tjumen 2007
Kinnitatud toimetuse ja kirjastusnõukogu poolt
Tjumeni Riiklik Nafta- ja Gaasiülikool
Koostanud: Dotsent, Ph.D. Zabanov Mihhail Petrovitš
professor, d.t.s. Babitšev Dmitri Tihhonovitš
assistent, Pankov Dmitri Nikolajevitš
© Riiklik erialane kõrgharidusasutus
"Tjumeni riiklik nafta- ja gaasiülikool"
Tunni käigus on vaja tutvuda peamiste mehhanismide rühmade ja tüüpidega, nende graafiliste kujutistega. Õppige kujutama tõelist mehhanismi diagrammi kujul.
Aruanne peab kujutama ja kirjeldama klassikalisi mehhanismide tüüpe.
Masinaehitus on kaasaegse tehnoloogia juhtiv haru. Masinaehituse arengu määrab uute suure jõudlusega ja töökindlate masinate loomine. Selle kõige olulisema probleemi lahendus põhineb paljude teadusdistsipliinide tulemuste ja ennekõike mehhanismide ja masinate teooria komplekssel kasutamisel.
Masinate arenguga on termini "masin" sisu muutunud. Kaasaegsete masinate jaoks anname järgmise määratluse: Masin on seade, mille inimene on loonud energia, materjalide ja teabe muundamiseks, et hõlbustada füüsilist ja vaimset tööd, suurendada selle tootlikkust ning asendada osaliselt või täielikult inimest tema töö- ja füsioloogilistes funktsioonides.
Vastavalt masinate funktsioonidele jagatakse need järgmistesse klassidesse:
1) Energiamasinad
2) Transpordivahendid
3) Tehnoloogilised masinad
4) Juhtimine ja juhtimismasinad
5) Loogikamasinad
6) Küberneetilised masinad
Mõiste "mehhanism" määratlust on uute mehhanismide ilmnemisel korduvalt muudetud.
Mehhanism on kehade süsteem, mis on loodud ühe või mitme jäiga keha liikumise teisendamiseks teiste kehade vajalikeks liikumisteks. Kui liikumise muundamisel osalevad lisaks tahketele kehadele ka vedelad või gaasilised kehad, siis nimetatakse mehhanismi vastavalt hüdrauliliseks või pneumaatiliseks. Funktsionaalsuse poolest jagunevad mehhanismid järgmisteks tüüpideks:
1) Mootorite ja muundurite mehhanismid
2) Hammasrattad
3) Täiturmehhanismid
4) Juhtimis-, kontrolli- ja reguleerimismehhanismid
5) Töödeldud toodete ja esemete söötmise, transportimise ja sorteerimise mehhanismid
6) Valmistoodete automaatse loendamise, kaalumise ja pakendamise mehhanismid
Mehhanismi peamine omadus on mehaanilise liikumise ümberkujundamine. Mehhanism on osa paljudest masinatest, kuna energia, materjalide ja teabe muundamine nõuab tavaliselt mootorilt saadud liikumise ümberkujundamist. Mõisteid "masin" ja "mehhanism" on võimatu samastada. Esiteks on lisaks masinas olevatele mehhanismidele alati mehhanismide juhtimisega seotud lisaseadmed. Teiseks on masinaid, milles puuduvad mehhanismid. Näiteks on viimastel aastatel loodud tehnoloogilisi masinaid, milles iga täitevorganit juhib individuaalne elektri- või hüdromootor.
Mehhanismide kirjeldamisel jaotati need konstruktsiooni alusel eraldi rühmadesse (hoob, nukk, hõõrdumine, käik jne)
Mehhanismid moodustuvad lülide järjestikuste kinnitustega algmehhanismi külge.
LINK - üks või mitu üksteisega fikseeritult ühendatud osa, mis on mehhanismis ja liiguvad ühena.
INPUT LINK - link, millele teatatakse liikumisest, mis muundatakse mehhanismi poolt muude linkide vajalikeks liikumisteks. Sisendlüli on ühendatud mootoriga või mõne muu mehhanismi väljundlingiga.
OUTPUT LINK - link, mis teeb liigutuse, mille jaoks mehhanism on ette nähtud. Väljundlink on ühendatud ajamiga (töökorpus, instrumendi osuti) või mõne muu mehhanismi sisendlingiga.
Lingid on omavahel liikuvalt ühendatud kinemaatikapaaride abil: pöörlevad (hinge) ja translatsioonilised (liugur).
TRAJEKTOOR punktid(link) - punkti liikumisjoon tasapinnal. See võib olla sirgjoon või kõver.
SIDEMED
Kangimehhanismid on mehhanismid, mis sisaldavad jäikaid lülisid, mis on omavahel ühendatud pöörlevate ja translatsiooniliste kinemaatiliste paaridega. Lihtsaim kangimehhanism on kahe lüliga mehhanism, mis koosneb fikseeritud link-rackist 2 (Joonis 1.1 ) ja liigutatav hoob 1 , millel on võimalus pöörata ümber fikseeritud telje (tavaliselt on see esialgne mehhanism).
Joonis 1.1 Kahe lingi ühendus
TO kahe lüliga kangimehhanismid hõlmavad paljude pöörlevate masinate mehhanisme: elektrimootoreid, labadega turbiine ja ventilaatoreid. Kõigi nende masinate mehhanismid koosnevad hammaslatsist ja fikseeritud laagrites pöörlevast lülist (rootorist).
Keerulisemad kangimehhanismid on neljast lülist koosnevad mehhanismid nn nelja lüliga mehhanismid.
Peal Joon.1.2 kujutab hingedega nelja lüli mehhanismi, mis koosneb kolmest liikuvast lülist 1, 2, 3 ja ühest fikseeritud lülist 4. 1 raamiga ühendatud, saab teha täispöörde ja seda nimetatakse vändaks. Sellist liigendatud neljalülilist, mille koostises on üks vänt ja üks nookur, nimetatakse vänt-kiikmehhanism, kus vända pöörlev liikumine ühendusvarda abil muudetakse nookuri õõtsuvaks liikumiseks. Kui vänt ja ühendusvarras on ühes joones välja sirutatud, võtab klahv äärmise parempoolse asendi ja üksteise peale asetades võtab see vasakpoolse asendi.

Riis. 1.2 Hingedega nelja lüliga mehhanism
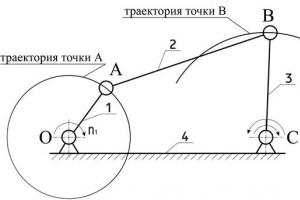
Sellise mehhanismi näide on joonisel näidatud mehhanism Joon.1.3 , kus link on 1 – vänt (sisendlink), link 2 - ühendusvarras, link 3 - rokkar. Mööda kõverat liikuv punkt M S kirjeldab trajektoori . Mõnda trajektoore saab kangimehhanismidega reprodutseerida teoreetiliselt täpselt, teisi - ligikaudu, praktikaks piisava täpsusega.
Vaadeldavat mehhanismi, mida nimetatakse sümmeetriliseks Tšebõševi mehhanismiks, kasutatakse sageli ringikujulise juhtmehhanismina, milles AB = BC = BM = 1. Näidatud seostega

Riis. 1.3 Vänt-klapp mehhanism
punkt Mühendusvarras AB kirjeldab telje suhtes sümmeetrilist trajektoori n - lk . Sümmeetriatelje kaldenurk tsentrite sirge CO suhtes määratakse järgmiselt: РМСО = π - Ω / 2. Punkti M trajektoori osa moodustab ringi kaar raadiusega O 1 M, mis saab kasutada väljundlingi peatamisega mehhanismides.
Veel üks näide neljast lülist on tehnoloogias laialt levinud liugur-vända mehhanism (Riis. 1.4 ).

Riis. 1.4 Vänt-liugur mehhanism
Selles mehhanismis on nookurvarre asemel paigaldatud liugur, mis liigub fikseeritud juhikuga. Seda väntmehhanismi kasutatakse kolbmootorites, pumpades, kompressorites jne. Kui ekstsentrilisus e on võrdne nulliga, siis saame keskse vända-liuguri mehhanismi või aksiaalse. Kell e nullist erinevat vänt-liuguri mehhanismi nimetatakse mittetsentraalseks või deaksiaalseks. Siin muundatakse vända OA pöörlemine läbi ühendusvarda AB liuguri edasi-tagasi liikumiseks. Loomulikult äärmuslikud liuguri asendid , saab olema siis, kui vänt ja ühendusvarras on ühel real.
Kui vaadeldavas mehhanismis asendame fikseeritud juhiku liigutatavaga, mida nimetatakse lavataguseks, siis saame nelja lüliga klahvmehhanism jalas kiviga. Sellise mehhanismi näide on höövli klappmehhanism ( Joon.1.5 ). Vänt 1 , pöörleb ümber telje, läbi klapi 2 teeb lava taga 3 teha õõtsuvat liigutust. Sel juhul liigub jalas kivi nookuri suhtes edasi-tagasi.

Riis. 1.5 Nelja lüliga klapimehhanism
Lavataguse äärmised asendid on vändaga risti. Selliseid positsioone on lihtne ehitada: tõmmatakse ring, mille raadius on võrdne vända pikkusega (punkti trajektoor A) ja puutujad tõmmatakse lavataguse pöörlemisteljelt.
Seega saavad lingid luua progressiivne , pöörlev või keeruline liikumine.
1. Vänt-liugur mehhanism.
a) keskne (joon. 1);
b) teljeväline (desoksü) (joonis 2);
e - ekstsentrilisus
Riis. 2
1-vändaga, sest lüli teeb täieliku pöörde ümber oma telje;
2-varras, mis pole riiuliga ühendatud, teeb tasase liikumise;
3-liugur (kolb), teostab translatsioonilist liikumist;
1 - vänt;
2 - lavatagune kivi (hülss) teeb koos tähega 1 täieliku pöörde ümber A (w1 ja w2 on samad) ning liigub ka mööda tähte 3, pannes selle pöörlema;
3 - jalas (stseen).
4. Hüdrauliline silinder
(kinemaatiliselt sarnane nookurmehhanismiga).
Projekteerimise käigus lahendab disainer kaks probleemi:
· analüüs(uurib valmis mehhanism);
· süntees(nõutavate parameetrite järgi projekteeritakse uus mehhanism);
Mehhanismi struktuurne analüüs.
Mõisted kinemaatilistest paaridest ja nende klassifikatsioonist.
Kaks omavahel fikseeritult ühendatud lüli moodustavad kinemaatilise paari. Kõik kinemaatilised paarid kuuluvad kahe sõltumatu klassifikatsiooni alla:
1. Paarid on kõrgemad või madalamad:
a. Kõrgemad paarid on paarid, milles kontakt toimub piki joont.
b. Alumised paarid on paarid, milles kontakt toimub piki pinda.
2. Kõik paarid jagunevad viide klassi, olenevalt iga lüli liikuvusele seatud võlakirjade arvust. Vabadusastmete arvu tähistab . Kehtestatud ühenduste arv on tähistatud . Sel juhul saab liikuvusastmete arvu määrata valemiga: .
a. Esimese klassi paar: ; .
b. Teise klassi paar: ; .
c. Kolmanda klassi paar: ; .
d. Neljanda klassi paar: ; .
e. Viienda klassi paar: ; .
Näited paaride klassifikatsioonist:
Mõelge kinemaatilisele paarile "kruvi-mutter". Selle paari liikuvusastmete arv on 1 ja kehtestatud sidemete arv on 5. See paar on viienda klassi paar, kruvi või mutri jaoks saab vabalt valida ainult ühte liikumisviisi ja teist liikumine on kaasas.
Kinemaatiline kett– erinevate klasside kinemaatikapaaridega omavahel ühendatud lingid.
Kinemaatilised ahelad on ruumilised ja lamedad.
Ruumikinemaatilised ahelad- ketid, mille lülid liiguvad erinevatel tasapindadel.
Lamedad kinemaatilised ahelad- ketid, mille lülid liiguvad ühel või paralleelsel tasapinnal.
Mõisted kinemaatiliste ahelate ja mehhanismide liikuvuse astmest.
Ruumis vabalt hõljuvate linkide arv on tähistatud kui . Linkide puhul saab mobiilsuse astme määrata järgmise valemiga: . Moodustame nendest lülidest kinemaatilise ahela, ühendades lülid üksteisega erinevate klasside paarides. Erinevate klasside paaride arvu tähistatakse , kus on klass, see tähendab: on esimese klassi paaride arv, millel on , ja ; - teise klassi paaride arv, millel on , ja ; - kolmanda klassi paaride arv, millel on , ja ; - neljanda klassi paaride arv, millel on , ja ; - viienda klassi paaride arv, mille puhul , ja . Moodustunud kinemaatilise ahela liikuvusastme saab määrata valemiga: .
Kinemaatilisest ahelast moodustame mehhanismi. Mehhanismi üks peamisi omadusi on riiuli (korpus, alus) olemasolu, mille ümber ülejäänud lülid liiguvad juhtiva lüli (linkide) toimel.
Mehhanismi liikuvuse astet tähistatakse tavaliselt kui. Muudame kinemaatilise ahela ühe lüli riiuliks, see tähendab, et võtame sellelt kõik kuus liikuvusastet, seejärel: - Somovi-Malõševi valem.
Lamedas süsteemis on maksimaalne vabadusastmete arv kaks. Seetõttu saab lameda kineetilise ahela liikuvusastme määrata järgmise valemiga: . Lamemehhanismi liikuvusaste määratakse Tšebõševi valemiga: , kus on liikuvate lülide arv. Kasutades kõrgema ja madalama kinemaatiliste paaride määratlust, saab Tšebõševi valemi kirjutada järgmiselt: .
Liikuvusastme määramise näide:
Mehhanismide klassifikatsioon
Mehhanismi tüüpide ja tüüpide arv ulatub tuhandetesse, mistõttu on nende klassifitseerimine vajalik ühe või teise mehhanismi valimiseks suure hulga olemasolevate hulgast, samuti mehhanismi sünteesimiseks.
Universaalset klassifikatsiooni pole, kuid kõige levinumad on 3 klassifikatsiooni tüüpi:
1) funktsionaalne. Tehnoloogilise protsessi põhimõtte järgi jaotatakse mehhanismid mehhanismideks: lõikeriista liikuma panemine; toide, laadimine, osade eemaldamine; transport jne;
2) struktuurne ja konstruktiivne. See näeb ette mehhanismide eraldamise nii konstruktsioonitunnuste kui ka konstruktsioonipõhimõtete järgi. See tüüp sisaldab mehhanisme: vänt-liugur; jalas; kang-hambuline; nukk-hoob jne;
3) struktuurne. Lihtne, ratsionaalne, mis on tihedalt seotud mehhanismi moodustamise, selle struktuuri, kinemaatilise ja jõuanalüüsi meetoditega, pakkus välja L.V. Assur 1916. aastal ja põhineb põhimõttel konstrueerida mehhanism kinemaatilisi ahelaid (struktuurirühmade kujul) kihistamise (kinnitades) algmehhanismile. Selle klassifikatsiooni järgi saab mis tahes mehhanismi saada lihtsamast, kinnitades viimase külge vabadusastmete arvuga kinemaatilised ahelad W= 0, mida nimetatakse struktuurirühmadeks või Assuri rühmadeks.
Vene Föderatsiooni transpordiministeerium
Föderaalne mere- ja jõetranspordiagentuur
Krimmi haru
FGBOU VPO
"Admiral F. F. Ušakovi nimeline Riiklik Mereülikool"
Osakond "Põhidistsipliinid"
Mehhanismide ja masinate teooria
kursuse projekt
Lameühendus
Selgitav märkus
Projekti töötas välja: Art. gr. _
_____________________________
Projekti juht: prof. Burov V.S.
Sevastopol 2012
1. Lamekangi mehhanismi kinemaatiline analüüs ................................................ .............................. 3
1.1. Liikumise konstruktsioon 12 asendis................................................ ...................................................... 3
1.2. Hetkekiiruste plaanide koostamine ................................................ .................................................................. 4
1.3. Hetkeliste kiirenduste plaanide koostamine ................................................ .......................................................... 5
1.4. Nihkeskeemi konstrueerimine .................................................. .............................................................. ........ 8
1.5. Kiiruste diagrammi koostamine .................................................. ................................................................ ............ 9
1.6. Kiirendusdiagrammi koostamine .................................................. .............................................................. ............... 9
2. Lamekangi mehhanismi jõuanalüüs ................................................ ..................................... 10
2.1. Mehhanismi lülidele mõjuvate koormuste määramine ................................................ ........ 10
2.2. Lingide rühma 7, 6 jõuarvutus ................................................ ...................................................... 12
2.3. Lingide rühma 4, 5 jõuarvutus ................................................ ...................................................... 13
2.4. Lingide rühma 2, 3 jõuarvutus...................................................... . ................................................ 14
2.5. Juhtlüli jõu arvutamine ................................................ ...................................................... ......... 15
2.6. Juhtlüli jõu arvutamine Žukovski meetodil................................................ ...................... 15
3. Käigumehhanismi süntees ................................................... ...................................................... ......... 16
3.1. Käigumehhanismi geomeetriliste parameetrite määramine................................................ ...... 16
3.2. Lineaarkiiruste plaani koostamine ................................................ .. .................................. 19
3.3. Nurkkiiruste plaani koostamine ................................................ .................................................. 20
4. Nukkmehhanismi süntees ................................................... ...................................................... ... .21
4.1. Kiirenduste analoogide joonistamine ................................................... .............................................................. ... 21
4.2. Joonistamise kiiruse analoogid ................................................... ................................................................ .. 22
4.3. Nihkete analoogide joonistamine ................................................... ........................... 22
4.4. Nuki minimaalse algraadiuse leidmine ................................................ .............................. 22
4.5. Nukkprofiili ehitamine .................................................. .................................................. .................. 23
Bibliograafia................................................................ ................................................ .. ...................... 24
1. Lamekangi mehhanismi kinemaatiline analüüs.

Arvestades:
Lamekangi mehhanismi skeem.
Mehhanismi geomeetrilised parameetrid:
l OA \u003d 125 mm;
l AB \u003d 325 mm;
l AC \u003d 150 mm;
On vaja ehitada mehhanism 12 asendis, iga nende positsioonide hetkekiiruste plaanid, mis tahes 2 positsiooni hetkekiirenduse plaanid, samuti nihkete, kiiruste ja kiirenduste diagrammid.
1.1 Lamekangi mehhanismi 12 asendi konstruktsioon.
Joonistage ring raadiusega OA. Siis on mastaabitegur järgmine:

Valime mehhanismi algpositsiooni ja sellest punktist jagame ringi 12 võrdseks osaks. Saadud punktidega ühendame ringi keskpunkti (punkt O). Need on esimese lingi 12 positsiooni.
Läbi t O tõmbame horisontaalse sirge X-X. Seejärel ehitame raadiusega AB ringid, mille keskpunktid on eelnevalt saadud punktides. Ühendame punktid B 0, B 1, B 2, ..., B 12 (ringide lõikekoht sirgega X-X) punktidega 0, 1, 2, ..., 12. Saame 12 positsiooni teine link.
Alates t. O lükkame lõigu b edasi. Saame punkti O 1 . Sellest raadiusega O 1 D joonistame ringi.
Lõikudes AB 0, AB 1, AB 2, ..., AB 12 punktist A eraldame vahemaa, mis on võrdne AC-ga. Saame punktid С 0 , С 1 , С 2 , …, С 12 . Nende kaudu joonistame kaared raadiusega DC, kuni need ristuvad ringiga, mille keskpunkt on punkt O 1 . Ühendame punktid C 0, C 1, C 2, ..., C 12 saadud punktidega. Need on kolmanda lingi 12 positsiooni.
Punktid D 0, D 1, D 2, ..., D 12 on ühendatud t-ga O 1. Saame neljanda lingi 12 positsiooni.
Ringi kõrgeimast punktist, mille keskpunkt on punktis O1, eraldame horisontaalse segmendi, mis on võrdne a-ga. Läbi selle otsa tõmbame vertikaalse joone Y-Y. Edasi, punktidest D 0 , D 1 , D 2 , ..., D 12 ehitame kaared raadiusega DE kuni ristumiskohani saadud sirgega. Ühendame need punktid äsja saadud punktidega. Need on viienda lüli 12 positsiooni.
Arvestades mastaabitegurit, on linkide mõõtmed järgmised:
AB \u003d l AB * \u003d 325 * 0,005 \u003d 1,625 m;
AC \u003d l AC * \u003d 150 * 0,005 \u003d 0,75 m;
CD = l CD * = 220 * 0,005 = 1,1 m;
Umbes 1 D \u003d l O1 D * \u003d 150 * 0,005 \u003d 0,75 m;
DE \u003d l DE * \u003d 200 * 0,005 \u003d 1 m;
a 1 \u003d a * \u003d 200 * 0,005 \u003d 1 m;
b 1 \u003d b * \u003d 200 * 0,005 \u003d 1 m.
1.2 Hetkekiiruste plaanide koostamine.
Mehhanismi kiirusplaani koostamiseks on erinevaid meetodeid, millest levinuim on vektorvõrrandite meetod.
Punktide O ja O 1 kiirused on võrdsed nulliga, seetõttu langevad need kiirusplaanil kokku kiirusplaani p poolusega.
Positsioon 0:


Kuid t.B kiirus langes kokku poolusega p, seega V B = 0, mis tähendab, et ka kõigi teiste punktide kiirused langevad kokku poolusega ja on võrdsed nulliga.
Samamoodi koostatakse hetkkiiruste plaanid positsioonide 3, 6, 9, 12 jaoks.
1. positsioon:
Kiirus t.A saadakse võrrandist:

Kiirusvektori m.A toimejoon on lüliga OA risti ja ise on suunatud lüli pöörlemise suunas.
Hetkekiiruste plaanil ehitame segmendi (pa) ┴ OA, selle pikkus (pa) = 45 mm. Siis on mastaabitegur:

Kiirus t.V saadakse võrranditest:
 , kus V BA ┴ VA ja V BB0 ║X-X
, kus V BA ┴ VA ja V BB0 ║X-X
Kiirusplaanil t.a-st ehitame sirge ┴ lingile BC ja t.r-st horisontaalse sirge. Ristmikul saame punkti b. Ühendame t.a ja t.b. See on kiirusvektor t.B (V B).
VB = pb* = 0,04*15,3 = 0,612
t.C kiirus määratakse sarnasusteoreemi ja tähtede lugemise reegli abil. Tähtede lugemise reegel on, et jäiga lingi kiiruste või kiirenduste plaanile tähtede kirjutamise järjekord peab täpselt ühtima tähtede kirjutamise järjekorraga lingile endale.
Proportsioonist:
Saate määrata segmendi ac pikkuse:

Jätame t.a-st kõrvale lõigu, mis on võrdne 19,2 mm, saame t.s, ühendame selle poolusega, saame kiirusvektori t.C (V C).
Kiirus t.D määratakse geomeetriliste võrrandite süsteemi lahendamisega:
 , kus V DC ┴ DC ja V DO 1 ┴ DO 1
, kus V DC ┴ DC ja V DO 1 ┴ DO 1
Kiirusplaani t.c-st ehitame sirge ┴ alalisvoolu lingile ja t.r-st tõmbame sirge ┴ DO 1. Ristmikul saame punkti d. Ühendame t.d poolusega, saame kiirusvektori t.D (V D).
V D \u003d pd * \u003d 0,04 * 37,4 \u003d 1,496
Samuti leiame võrrandisüsteemi lahendusest kiiruse:
 , kus V ED ┴ ED ja V EE 0 ║Y-Y
, kus V ED ┴ ED ja V EE 0 ║Y-Y
Kiirusplaanil t.d-st ehitame sirge ┴ DE lingile ja t.r-st püstjoone. Ristmikul saame st. Ühendame t.a ja t.b. See on kiirusvektor t.B (V B).
V E \u003d pe * \u003d 0,04 * 34,7 \u003d 1,388
Samamoodi koostatakse hetkekiiruste plaanid mehhanismi 2, 3, 4, 5, 7, 8, 10, 11 positsiooni jaoks.
1.3 Hetkelise kiirenduse plaanide koostamine.
Punktide O ja O 1 kiirendused on võrdsed nulliga, seetõttu langevad need kiirendusplaanil kokku kiirendusplaani poolusega π.
Positsioon 0:
Punkti A kiirendus leitakse:

Hetkeliste kiirenduste plaanile ehitame lõigu πа ║ ОА, selle pikkus (πа)=70 mm. Siis on mastaabitegur:


Kiirenduse suund t.B ja t.A ║ sirge X-X, ┴ BA, seega kiirendus t.B langeb kokku hetkekiirenduse vektori t.A lõpuga, mis tähendab, et mehhanismi kõigi teiste punktide kiirendused langevad sellega kokku.
Väide 7:
Punkti A kiirendus leitakse:
Hetkeliste kiirenduste plaanile ehitame lõigu πа ║ ОА, selle pikkus (πа)=70 mm.
Punkti B kiirenduse saab leida, lahendades vektorvõrrandi:


Alates t.a eraldame lõigu, mis on võrdne 21 mm ║ AB, seejärel moodustame saadud vektori lõpust lõigu ┴ AB ja tõmbame läbi pooluse horisontaalse joone. Ühendades ristmiku ahastuse poolusega, saame kiirendusvektori t.V.
Leiame kiirenduse t.C kasutades sarnasusteoreemi ja tähtede lugemise reeglit:
Seega
Punkti D kiirenduse saab leida vektori võrrandisüsteemi lahendamisega:



T.s-st eraldame segmendi, mis on võrdne 14,5 mm ║ DC, seejärel moodustame saadud vektori lõpust segmendi ┴ DC.


Punktist π ehitame lõigu, mis on võrdne 1,75 mm ║ O 1 D, seejärel tõmmake sirge ┴ O 1 D läbi saadud vektori otsa.
Punkti E kiirenduse saab leida vektori võrrandisüsteemi lahendamisega:
![]()

Punkti E ║ ED kiirenduse suund, seega tõmbame läbi pooluse horisontaalse sirge ja kiirendusvektori t.D so-otsast ehitame lõigu, mis on võrdne 1,4 mm ║ ED, seejärel tõmbame sirge. ┴ ED saadud vektori lõpust. Ühendades sirge ║ ED ja sirge ┴ ED lõikepunkti poolusega, saame punkti E kiirendusvektori.
1.4 Väljundlüli nihkeskeemi konstrueerimine.
Väljundlüli nihkeskeem saadakse segmentide konstrueerimise tulemusena, mis on võetud 12-asendis lamekangi mehhanismi jooniselt, võttes arvesse mastaabitegurit

1.5 Väljundlingi kiirusskeemi koostamine.
Väljundlingi kiirusdiagramm saadakse graafilise diferentseerimise tulemusena väljundlingi nihkeskeemi inkrementaalsel meetodil. See meetod on sisuliselt akordimeetod. Kui pooluse konstantne kaugus H on võrdne intervalli Δt väärtusega, siis ei ole vaja kiiri juhtida läbi pooluse П, kuna sel juhul on lõigud h i funktsiooni S(t) sammud intervallil Δt. .
See tähendab, et nihke diagrammile ehitatakse vertikaalne segment esimesest jaotusest kuni graafiku lõikepunktini. Seejärel eraldatakse ristumispunktist horisontaalne segment, kuni see lõikub järgmise jaotusega. Seejärel eraldatakse saadud punktist vertikaalne segment uuesti, kuni see ristub graafikuga. Seda korratakse kuni ajakava lõpuni. Saadud segmendid ehitatakse kiirusdiagrammile, võttes arvesse mastaabitegurit, kuid mitte esimesest jaotusest, vaid pool jaotust varem:

1.6 Väljundlüli kiirendusskeemi koostamine.
See on konstrueeritud sarnaselt mehhanismi väljundlüli kiirusdiagrammiga

2. Lamekangi mehhanismi jõuanalüüs.
Arvestades:
l OA = 125 mm;
l AB = 325 mm;
l AC = 150 mm;
l CD = 220 mm;
l O1 D = 150 mm;
l DE = 200 mm;
Fmax = 6,3 kN;
m K = 25 kg/m;
Kasulike takistusjõudude diagramm.
Vajalik on määrata reaktsioonid kinemaatilistel paaridel ja tasakaalustusmoment mehhanismi sisendvõllil.
2.1 Mehhanismi lülidele mõjuvate koormuste määramine.
Arvutame raskusjõu. Nende jõudude resultandid asuvad lülide massikeskmetes ja nende suurused on võrdsed:
G 1 \u003d m 1 * g \u003d m K * l OA * g \u003d 25 * 0,125 * 10 \u003d 31,25 H
G 2 \u003d m 2 * g \u003d m K * l B A * g \u003d 25 * 0,325 * 10 \u003d 81,25 H
G 3 \u003d m V * g \u003d 20 * 10 \u003d 200 N
G 4 \u003d m 4 * g \u003d m K * l CD * g \u003d 25 * 0,22 * 10 \u003d 55 H
G 5 \u003d m 5 * g \u003d m K * l O 1D * g \u003d 25 * 0,15 * 10 \u003d 37,5 H
G 6 \u003d m 6 * g \u003d m K * l DE * g \u003d 25 * 0,2 * 10 \u003d 50 H
G 7 \u003d m 7 * g \u003d 15 * 10 \u003d 150 H
Leiame kasuliku takistuse jõu vastavalt kasuliku takistuse jõudude diagrammile. Mehhanismi vaadeldavas asendis on see jõud võrdne nulliga.
Kahjuliku vastupanu jõudude arvutamiseks andmed puuduvad, seega me neid arvesse ei võta.
Inertsiaalsete koormuste määramiseks on vaja linkide ja mõne punkti kiirendusi, seega kasutame mehhanismi vaadeldava positsiooni jaoks kiirendusplaani.
Määrame lülide inertsjõud. Juhtlüli on reeglina tasakaalustatud, see tähendab, et selle massikese asub pöörlemisteljel ja inertsiaalsete jõudude resultant on null. Mehhanismi teiste lülide inertsjõudude määramiseks määrame esmalt nende massikeskmete kiirendused:
ja S2 \u003d * πS 2 \u003d 0,4 * 58,5 \u003d 23,4 m/s 2
ja B \u003d * πb \u003d 0,4 * 64,9 \u003d 25,96 m/s 2
ja S4 \u003d * πS 4 \u003d 0,4 * 65,7 \u003d 26,28 m/s 2
ja D \u003d * πd \u003d 0,4 * 78,8 \u003d 31,52 m/s 2
ja S6 \u003d * πS 6 \u003d 0,4 * 76,1 \u003d 30,44 m / s 2
ja E \u003d * πe \u003d 0,4 * 74,5 \u003d 29,8 m/s 2
Nüüd määratleme inertsjõud:
F I2 \u003d m 2 * a S2 \u003d 8,125 * 23,4 \u003d 190 H
F I3 \u003d m 3 * a B \u003d 20 * 25,96 \u003d 519 H
F I4 \u003d m 4 * a S4 \u003d 5,5 * 26,28 \u003d 145 H
F I6 \u003d m 6 * a S6 \u003d 5 * 30,44 \u003d 152 H
F I7 \u003d m 7 * a E \u003d 15 * 29,8 \u003d 447 H
Inertsjõumomentide määramiseks on vaja leida lülide masside ja nende nurkkiirendite inertsimomendid. Lingide 3 ja 7 puhul on massid koondunud punktidesse, lüli 1 jaoks ja nurkiirendus on null, seega on selle lüli inertsjõudude momendid null.
Oletame, et lülide 2, 4 ja 6 massijaotus on nende pikkuses ühtlane. Siis on lülide inerts punktide S i suhtes võrdne:
J S 2 = m 2 * l 2 2 / 12 \u003d 8,125 * 0,325 2 / 12 \u003d 0,0715 kg * m 2
J S 4 = m 4 * l 4 2 / 12 = 5,5 * 0,22 2 / 12 \u003d 0,0222 kg * m 2
J S 6 \u003d m 6 * l 6 2/12 \u003d 5 * 0,2 2/12 = 0,0167 kg * m 2
Ühenduste 2, 4, 5 ja 6 nurkkiirendused on määratud suhteliste tangentsiaalsete kiirendustega, seega:



Leiame 2, 4, 6 lüli inertsjõudude momendid:
M I2 \u003d J S 2 * \u003d 0,0715 * 82,22 \u003d 5,88 Nm
M I4 \u003d J S 4 * \u003d 0,0222 * 42,73 \u003d 0,95 Nm
M I6 \u003d J S 4 * \u003d 0,0167 * 35,6 \u003d 0,59 Nm
2.2 Lingide rühma 6, 7 jõuarvutus.
Valime mehhanismist lülide grupi 6, 7, järjestame kõik reaalsed koormused ja jõud ja inertsjõudude momendid.
Asendame tegevuse vaadeldaval väljalangenud linkide rühmal jõududega. St liugurile 7 mõjub raami küljelt - liuguri juhiku - tulev jõud. Hõõrdumise puudumisel on interaktsioonijõud suunatud kontaktpindadega risti, st liuguri liikumissuunaga risti ja see pole veel teada vasakule või paremale, seetõttu suuname selle jõu kõigepealt õigus. Kui pärast arvutusi selgub, et see on negatiivne, siis on vaja suunda muuta.
Nimetusindeksisse pannakse kaks numbrit: esimene näitab, millisest lülist jõud mõjub, ja teine näitab, millisele lülile see jõud mõjub.
Ühenduse 5 punktis D mõjutab lüli 6 jõud R 56 . Selle jõu suurust ega suunda ei teata, seetõttu määrame selle kahe komponendi abil: ühe suuname piki lüli ja nimetame seda normaalkomponendiks ning teise lüliga risti ja tangentsiaalseks komponendiks. nende komponentide esialgne suund valitakse meelevaldselt ja tegelik suund määratakse pärast arvutusi jõu märgiga.
Kasuliku takistuse jõud mõjub ka liugurile E, kuid see on võrdne nulliga.
Asetame kõik loetletud jõud valitud lülide rühmale ja määrame tundmatud reaktsioonid kinemaatilistes paarides E, D - R E ja R 56 .
Esiteks määrame lüli 6 tasakaalutingimuse põhjal jõu R 56 tangentsiaalse komponendi. Võrreldes punkti E suhtes mõjuvate jõudude momentide summa nulliga, saame:

Inertsjõudude moment tuleb jagada, sest lülid on näidatud skaalal ja arvutustes kasutatakse nende jooniselt võetud väärtusi.
Jõu R 56 normaalkomponent ja jõud RE E leitakse graafilise meetodiga vektori hulknurgast, mis on konstrueeritud lülide rühmale 6, 7. On teada, et jõu tasakaalus peab jõuvektoritest koosnev hulknurk olema suletud. :
Kuna jõu normaalkomponendi R 56 ja R E toimejoonte suunad on teada, siis konstrueerides teadaolevatest jõuvektoritest eelnevalt avatud hulknurga, saab selle sulgeda, kui tõmmata sirgjooned läbi esimese ja viimase vektori lõpp, paralleelne soovitud jõudude suundadega. Nende joonte lõikepunkt määrab soovitud vektorite suuruse ja nende tegelikud suunad.
Konstruktsioonidest on näha, et jõu R 76 suund on n-st m-ni ja jõud R 67 on m-st n-ni.
R 56 \u003d * \u003d 1/4 * 209,7 \u003d 52,43 N
R E \u003d * \u003d 1/4 * 69,3 \u003d 17,33 N
2.3 Lingide rühma jõu arvutamine 5.4.
Valime mehhanismist lülide rühma 4, 5, reastame kõik tegelikud koormused ja jõud ja inertsjõudude momendid, äravisatud lülide reaktsioonid. Punktis D mõjub jõud R 65, mis võrdub R 56-ga ja on suunatud sellele vastupidi.
Tundmatud on: 4 ja 2 lingi koosmõju jõud, 5 lingi ja raami koosmõju jõud.
Ühenduse 2 punktis C mõjutab lüli 4 jõud R 24 . Selle jõu suurust ega suunda ei teata, seetõttu määrame selle kahe komponendi abil: ühe suuname piki lüli ja nimetame seda normaalkomponendiks ning teise lüliga risti ja tangentsiaalseks komponendiks. nende komponentide esialgne suund valitakse meelevaldselt ja tegelik suund määratakse pärast arvutusi jõu märgiga.
Esmalt määrame lüli 4 tasakaalutingimuse põhjal jõu R 24 tangentsiaalse komponendi. Võrreldes punkti D suhtes mõjuvate jõudude momentide summa nulliga, saame:

Jõu R 24 ja jõu R O 1 normaalkomponent leitakse graafilise meetodiga vektori hulknurgast, mis on konstrueeritud lülide rühmale 5, 4. On teada, et jõu tasakaalus peab jõuvektoritest koosnev hulknurk olema suletud:
Määrame reaktsioonide suuruse kinemaatiliste paaride kaupa:
R 24 \u003d * \u003d 1 * 26,6 \u003d 26,6 N
R O 1 \u003d * \u003d 1 * 276,6 \u003d 276,6 N
2.4 Lingide rühma 2, 3 jõuarvutus.
Valime mehhanismist lülide rühma 2, 3, järjestame kõik tegelikud koormused ja jõud ning inertsjõudude inertsmomendid, väljalangenud lülide reaktsioonid. Punktis C mõjub jõud R 24, mis on võrdne R 24-ga ja on suunatud sellele vastassuunas.
Tundmatud on: 1 ja 2 lingi vastasmõju jõud, 2 lingi vastasmõju jõud ja liugur.
Ühenduse 1 punktis C mõjutab lüli 2 jõud R 12 . Selle jõu suurust ega suunda ei teata, seetõttu määrame selle kahe komponendi abil: ühe suuname piki lüli ja nimetame seda normaalkomponendiks ning teise lüliga risti ja tangentsiaalseks komponendiks. nende komponentide esialgne suund valitakse meelevaldselt ja tegelik suund määratakse pärast arvutusi jõu märgiga.
Esiteks määrame lüli 2 tasakaalutingimusest jõu R 12 tangentsiaalse komponendi. Võrdustades punkti A suhtes mõjuvate jõudude momentide summa nulliga, saame:

Jõu R 12 normaalkomponent ja jõud R B leitakse graafilise meetodiga vektori hulknurgast, mis on konstrueeritud lülide rühmale 2, 3. On teada, et jõu tasakaalu korral tuleb jõuvektoritest koosnev hulknurk sulgeda. :
Kuna jõu normaalkomponendi R 24 ja R O 1 toimejoonte suunad on teada, siis konstrueerides teadaolevatest jõuvektoritest varem avatud hulknurga, saab selle sulgeda, kui tõmmata sirgjooned läbi esimese alguse ja viimase vektori lõpp, paralleelne soovitud jõudude suundadega. Nende joonte lõikepunkt määrab soovitud vektorite suuruse ja nende tegelikud suunad.
Määrame reaktsioonide suuruse kinemaatiliste paaride kaupa:
R 12 \u003d * \u003d 1/2 * 377,8 \u003d 188,9 N
R B \u003d * \u003d 1/2 * 55,4 \u003d 27,7 N
2.5 Juhtlüli võimsuse arvutamine.
Juhtlüli on tavaliselt tasakaalus, see tähendab, et selle massikese asub pöörlemisteljel. See eeldab, et vända OA jätkusele paigaldatud vastukaalu inertsjõud on võrdne OA lüli inertsjõuga:

m \u003d M 1 / l OA \u003d 3,125 / 0,125 \u003d 25 kg - kaal pikkuseühiku kohta.
Siit on võimalik määrata vastukaalu mass m 1, arvestades selle kaugust r 1 pöörlemisteljest. At r 1 = 0,5 * l m 1 = M 1 (OA lüli mass).
Punktis A mõjub lüli 2 lülile 1 jõud R 21, mille moment punkti O suhtes on võrdne tasakaalustusmomendiga.
Sel juhul toimub punktis O reaktsioon R O, mis on võrdne ja vastupidine jõuga R 21 . Kui lüli raskusjõud on proportsionaalne jõuga R 21, siis tuleb seda arvestada toe O reaktsiooni määramisel, mille saab vektorvõrrandist:
![]()
2.6 Juhtlüli võimsuse arvutamine Žukovski meetodil.
Pöörlemissuunas 90 0 võrra pööratud mehhanismi hetkekiiruste plaanile rakendame kõik mehhanismile mõjuvad jõud ja koostame pooluse suhtes mõjuvate jõudude momentide võrrandi.
Vastused eksamiküsimustele TMM-is
Moskva Riiklik Ülikool
Inseneriökoloogia
Masinate ja mehhanismide teooria (TMM)
Eksami küsimused
päevaosakonna õpperühmadele.
1. Mehhanismide struktuur
1.1. Masin ja mehhanism. Mehhanismide klassifikatsioon funktsionaalsete ja struktuur-konstruktiivsete tunnuste järgi.
VASTUS: Akadeemik Artobolevski definitsiooni järgi:
Auto- on olemas inimese loodud seadmed loodusseaduste uurimiseks ja kasutamiseks, et hõlbustada füüsilist ja vaimset tööd, suurendada selle tootlikkust, asendades selle osaliselt või täielikult töö- ja füsioloogilistes funktsioonides.
mehhanism– kehade süsteem, mis on loodud ühe või mitme keha liikumise muutmiseks teiste jäikade kehade vajalikuks liikumiseks. Kui liikumise muundamisel osalevad vedelad või gaasilised kehad, nimetatakse seda mehhanismi hüdrauliliseks või pneumaatiliseks. Tavaliselt on mehhanismil üks sisendlink, mis võtab vastu mootori liikumise, ja üks väljundlüli, mis on ühendatud töökorpuse või instrumendi indikaatoriga. Mehhanismid on lamedad ja ruumilised.
Masinate klassifikatsioon funktsionaalse otstarbe järgi:
Energia (mootorid, generaatorid).
Töölised (transport, tehnoloogiline).
Teave (kontroll ja juhtimine, matemaatiline).
Küberneetiline.
Masinad koosnevad mehhanismidest.
Funktsionaalse klassifikatsiooni järgi on olemas:
Mootorite ja muundurite mehhanismid;
Täitevmehhanismid;
ülekandemehhanismid;
Juhtimis-, reguleerimis-, reguleerimismehhanismid;
Söötmis-, söötmis-, sorteerimismehhanismid;
Loendamise, kaalumise, pakendamise mehhanismid.
Nende mehaaniliste parameetrite arvutamise struktuuris ja metoodikas on palju ühist.
Struktuurne-konstruktiivne klassifikatsioon:
Kangi mehhanismid;
Nukimehhanismid;
Käigumehhanismid (koosnevad hammasratastest);
Kombineeritud.
1.2. Kangi mehhanismid. Eelised ja miinused. Rakendus tehnilistes seadmetes.
VASTUS: Kangimehhanismid koosnevad hoobade, varraste kujul valmistatud korpustest. Need vardad või hoovad suhtlevad üksteisega piki pinda. Seetõttu on kangimehhanismid võimelised tajuma ja edastama olulisi jõude.
Neid kasutatakse peamiste tehnoloogiliste seadmetena. Nõutava liikumisseaduse reprodutseerimine selliste mehhanismidega on aga väga piiratud.
1.3. Nukimehhanismid. Nukkmehhanismide tüübid. Eelised ja miinused. Peamine eesmärk.
VASTUS: Nukkmehhanism koosneb kõverjoonelisest kehast, mille liikumise iseloom määrab kogu mehhanismi liikumise. Peamine eelis on see, et ilma linkide arvu muutmata saab nuki profiili muutes reprodutseerida mis tahes liikumisseadust. Kuid nukkmehhanismis on lingid, mis puutuvad kokku punktis või piki joont, mis piirab oluliselt ülekantava jõu suurust väga kõrgete erirõhkude ilmnemise tõttu. Seetõttu kasutatakse nukkmehhanisme peamiselt tehnoloogilise protsessi automatiseerimise vahendina, kus nukk täidab kõva programmikandja rolli.
1.4. käigumehhanismid. Käigumehhanismide tüübid. Peamine eesmärk.
VASTUS: käigu mehhanism nimetatakse mehhanismi, mis sisaldab hammasrattaid (kere, millel on suletud eendite või hammaste süsteem).
Käigumehhanisme kasutatakse peamiselt pöörleva liikumise edastamiseks, vajadusel nurkkiiruse suuruse ja suuna muutmisega.
Liikumise ülekanne nendes mehhanismides toimub spetsiaalselt profileeritud hammaste külgsurve tõttu. Antud nurkkiiruste suhte reprodutseerimiseks peavad hambaprofiilid olema vastastikku painduvad, see tähendab, et ühe ratta hambaprofiil peab vastama teise ratta täpselt määratletud hambaprofiilile. Hammaste profiile saab piiritleda erinevate kõverate abil, kuid kõige levinumad on mehhanismid, millel on evolutiline hambaprofiil, see tähendab, et hammas on kontuuriga piki evoluuti.
Nurkkiiruste konstantse suhte taasesitamiseks kasutatakse ümarate hammasratastega mehhanisme.
Seal on lamedad ja ruumilised mehhanismid. Lamemehhanismis on teljed paralleelsed, ruumilises aga ristuvad või ristuvad. Lamemehhanismis on rattad silindrikujulised, ruumilises koonilised (teljed lõikuvad).
Väga mitmekesine. Mõned neist on kombinatsioon ainult tahketest kehadest, teised koosnevad hüdraulilistest, pneumaatilistest kehadest või elektrilistest, magnetilistest ja muudest seadmetest. Vastavalt sellele nimetatakse selliseid mehhanisme hüdrauliliseks, pneumaatiliseks, elektriliseks jne.
Funktsionaalse eesmärgi seisukohalt jagunevad mehhanismid tavaliselt järgmisteks tüüpideks:
Mootorimehhanismid muudavad erinevat tüüpi energiat mehaaniliseks tööks (näiteks sisepõlemismootorite, aurumasinate, elektrimootorite, turbiinide jne mehhanismid).
Konverterite (generaatorite) mehhanismid muudavad mehaanilise töö muud tüüpi energiaks (näiteks pumpade, kompressorite, hüdroajamite mehhanismid jne).
Jõuülekandemehhanismi (ajami) ülesandeks on liikumise ülekandmine mootorilt tehnoloogilisele masinale või täiturmehhanismile, muutes selle liikumise selle tehnoloogilise masina või täiturmehhanismi tööks vajalikuks.
Täiturmehhanism on mehhanism, mis mõjutab otseselt töödeldavat keskkonda või objekti. Selle ülesandeks on muuta töödeldava kandja või objekti kuju, olekut, asendit ja omadusi (näiteks metallitöötlemismasinate, presside, konveierite, valtspinkide, ekskavaatorite, tõstepinkide jms mehhanismid).
Juhtimis-, seire- ja reguleerimismehhanismid on mitmesugused mehhanismid ja seadmed töödeldavate objektide mõõtmete tagamiseks ja kontrollimiseks (näiteks mõõtemehhanismid suuruste, rõhu, vedelikutaseme kontrollimiseks; regulaatorid, mis reageerivad peavõlli nurkkiiruse hälbele masin ja seadke selle võlli määratud kiirus; mehhanism, mis reguleerib valtspingi rullide vahelise kauguse püsivust jne).
Töödeldud kandjate ja esemete transpordi-, etteandmis- ja sortimise mehhanismid hõlmavad kruvitigude mehhanisme, puistematerjalide transportimiseks ja tarnimiseks mõeldud kaabitsa- ja kopatõstukeid, toorikute laadimispunkrite mehhanisme, valmistoodete sortimise mehhanisme suuruse, kaalu, konfiguratsiooni järgi, jne.
Valmistoodete automaatse loendamise, kaalumise ja pakendamise mehhanisme kasutatakse paljudes masinates, mis toodavad peamiselt mass-tükitooteid. Tuleb meeles pidada, et need mehhanismid võivad olla ka täiturmehhanismid, kui need sisalduvad selleks otstarbeks mõeldud spetsiaalsetes masinates.
See klassifikatsioon näitab ainult mehhanismide funktsionaalsete rakenduste mitmekesisust, mida saab oluliselt laiendada. Erinevate funktsioonide täitmiseks kasutatakse aga sageli mehhanisme, millel on sama struktuur, kinemaatika ja dünaamika. Seetõttu on mehhanismide ja masinate teoorias õppimiseks välja toodud mehhanismid, millel on ühised meetodid nende sünteesiks ja töö analüüsimiseks, sõltumata nende funktsionaalsest eesmärgist. Sellest vaatenurgast eristatakse järgmist tüüpi mehhanisme.