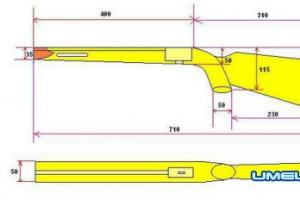
Isetegemise kontaktivaba voolumõõtja. Väikese suurusega vahelduvvoolu andur. Kontaktid kolmejuhtmelise ahela ühendamiseks
Voolumuundur on seade, mis võib asendada tänapäeval kasutatavaid voolutrafosid ja šunte. Seda kasutatakse juhtimiseks ja mõõtmiseks ning see on suurepärane insenerilahendus. Seadme disain on tehtud vastavalt kaasaegsetele seadmete tehnilise teostuse meetoditele ja viisidele, mis tagavad süsteemi mitmekülgsuse, mugavuse ja töökindluse. Seetõttu on Venemaa tootja välja töötatud mõõtemuundurid igal aastal väga nõudlikud. Võimalike muudatuste valik rõõmustab tarbijaid, kuna see võimaldab teil valida sobivaima lahenduse ja samal ajal mitte üle maksta.
Mis on vooluandurite eripära?
Mõõtevooluanduri peamine omadus on selle mitmekülgsus. Seadme sisendisse saab rakendada nii alalis- kui ka impulss- ja vahelduvvoolu. Selle mitmekülgsuse võimaldamiseks on tootjad välja töötanud Halli põhimõttel põhineva seadme. Muundur rakendab pooljuhtidel tehtud väikest vooluringi. Tema abiga määratakse seadme sisendile rakendatava voolu magnetvälja suurus ja suund. Seega on Halli efektiga voolumuundur ainulaadne seade, millel on kõrge jõudlus ja funktsionaalsus.
Seade on valmistatud korpuse kujul, millel on auk, mille kaudu juhitakse voolu juhtivat juhti. Konverteri elektroonilise vooluahela toide toimub võrgust alalispingega, mis on võrdne 15 voltiga. Seadme väljundisse ilmub vool, mille väärtus, suund ja aeg muutub otseses proportsioonis sisendis oleva vooluga. Sel juhul saab Halli efektil põhinevat voolumõõtemuundurit teha mitte ainult voolu juhtivate juhtmete väljundi jaoks mõeldud avaga, vaid ka seadme kujul, mis on ette nähtud paigaldamiseks voolukatkestuse korral.
Voolumõõtemuundurite konstruktsioonilised omadused
Kontaktivaba voolumõõtemuundur on valmistatud galvaanilisest isolatsioonist juhtahela ja toiteahela vahel. Muundur koosneb magnetahelast, kompensatsioonimähisest ja Halli seadmest. Kui vool läbib rehve, indutseeritakse magnetahelas induktsioon, samal ajal kui Halli seade tekitab pinge, mis muutub indutseeritud induktsiooni muutumisel. Väljundsignaal suunatakse elektroonilise võimendi sisendisse ja seejärel kompensatsioonimähisesse. Selle tulemusena liigub kompensatsioonimähise kaudu vool, mis on otseselt võrdeline sisendis oleva vooluga, samas kui primaarvoolu kuju kordub täielikult. Tegelikult on see voolu- ja pingemuundur.
Kontaktivaba vahelduvvoolu mõõtemuundur
Kõige sagedamini ostavad tarbijad kolmefaasiliste vahelduvvooluvõrkude jaoks voolu- ja pingeandureid. Seetõttu on tootjad spetsiaalselt välja töötanud lihtsama elektroonikaga ja vastavalt madala hinnaga mõõtemuundurid PIT-___-T. Seadmete töö võib toimuda erinevatel temperatuuridel, sagedusvahemikus 20-10 kHz. Samal ajal on tarbijatel võimalus valida muunduri väljundsignaali tüüp - pinge või vool. Kontaktivabad voolumuundurid on valmistatud paigaldamiseks ümarale või tasasele siinile. See laiendab oluliselt selle seadmete ulatust ja muudab selle asjakohaseks erineva võimsusega alajaamade rekonstrueerimisel.
Garaaži toiteallika korraldamiseks on väga mugav teada voolu, mida üks või teine sellesse võrku kuuluv seade tarbib. Nende seadmete valik on üsna lai ja täieneb pidevalt: puur, teritaja, veski, küttekehad, keevitusmasinad, mälu, tööstuslik föön ja palju muud ....
Vahelduvvoolu mõõtmiseks, nagu teada, vooluanduri endana, kasutatakse reeglina voolutrafot. See trafo on üldiselt sarnane tavapärasele allakäigule, mis on sisse lülitatud justkui "vastupidi", st. selle primaarmähis on üks või mitu keerdu (või siini), mis on läbinud südamiku - magnetahel ja sekundaarmähis on samal magnetahelal asuva õhukese traadi suure hulga keerdudega mähis (joonis 1).
Tööstuslikud voolutrafod on aga üsna kallid, mahukad ja sageli mõeldud mõõtma sadu ampreid. Majapidamisvõrgu jaoks mõeldud voolutrafot näeb müügil harva. Sel põhjusel sündis idee kasutada selleks elektromagnetilist alalis-/vahelduvvoolureleed, ilma sellise relee kontaktrühma kasutamata. Tegelikult sisaldab iga relee juba suure hulga õhukese traadi keerdudega mähist ja ainus asi, mida selle transformaatoriks muutmiseks on vaja, on luua mähise ümber magnetahel minimaalse õhuvahega. Lisaks vajab selline konstruktsioon muidugi piisavalt ruumi, et läbida primaarmähis, mis kujutab sisendvõrku.Pildil on selline RES22 tüüpi releest tehtud andur 24 V alalisvoolu jaoks. See relee sisaldab mähist, mille takistus on ligikaudu 650 oomi. Tõenäoliselt võivad sarnaseid rakendusi leida ka paljud muud tüüpi releed, sealhulgas vigaste magnetkäivitite jäänused jne. Magnetahela tagamiseks blokeeritakse relee armatuur mehaaniliselt maksimaalsel lähenemisel südamikule. Tundub, et relee on kogu aeg sees. Järgmiseks tehakse primaarmähise pööre ümber mähise (pildil kolmekordne sinine juhe).

Tegelikult on sellel vooluandur valmis, ilma liigse trügimiseta traadi mähisele keeramisega. Muidugi on seda seadet raske pidada täieõiguslikuks trafoks nii äsja saadud magnetahela väikese ristlõikepindala tõttu kui ka võib-olla selle magnetiseerimisomaduste erinevuse tõttu ideaalsest. üks. See kõik osutub aga vähem oluliseks, kuna vajame sellise "trafo" minimaalset võimsust ja see on vajalik ainult selleks, et tagada magnetoelektrilise süsteemi osuti indikaatori proportsionaalne (eelistatult lineaarne) kõrvalekalle sõltuvalt vool primaarmähises.

Võimalik vooluahel vooluanduri sidumiseks sellise indikaatoriga on näidatud diagrammil (joonis 2). See on üsna lihtne ja sarnaneb detektori vastuvõtja vooluringiga. Alaldi diood (D9B) on germaanium ja valiti selle pingelanguse väiksuse tõttu (umbes 0,3 V). Selle dioodi parameetrist sõltub minimaalse vooluväärtuse lävi, mida see andur suudab määrata. Sellega seoses on parem kasutada väikese pingelangusega nn detektordioode, näiteks GD507 jms. Paigaldatud on paar ränidioodi kd521v, et kaitsta osutit ülekoormuse eest, mis on võimalik märkimisväärsete voolutõusudega, mis on põhjustatud näiteks võrgusisesest lühisest, võimsate trafode või keevitusseadme sisselülitamisest. See on sellistel juhtudel väga levinud lähenemine. Tuleb märkida, et sellise lihtsa vooluahela puuduseks on see, et see ei saa absoluutselt "näha" koormust ühe polaarsusega voolu kujul, näiteks küttekeha või alaldi dioodi kaudu ühendatud kütteelement. Nendel juhtudel kasutatakse mõnevõrra "keerulist" vooluringi, näiteks pinge kahekordistava alaldi kujul (joonis 3).
Tere kõigile!
Võib-olla peaksin end veidi tutvustama - olen tavaline skeemiinsener, keda huvitab ka programmeerimine ja veel mõned elektroonikavaldkonnad: DSP, FPGA, raadioside ja mõned teised. Viimasel ajal olen sukeldunud SDR-vastuvõtjatesse. Algul tahtsin oma esimese artikli (ma loodan, et mitte viimase) pühendada mõnele tõsisemale teemale, kuid paljude jaoks muutub see lihtsalt lugemismaterjaliks ega ole kasulik. Seetõttu on valitud teema väga spetsiifiline ja ainult rakenduslik. Samuti tahan märkida, et tõenäoliselt kaalub kõiki neis olevaid artikleid ja küsimusi rohkem vooluringi insener, mitte programmeerija ega keegi teine. Noh - lähme!
Mitte nii kaua aega tagasi telliti mulle projekteerida "Elamu toiteallika jälgimise süsteem", klient ehitab maamaju, nii et mõni teist on võib-olla isegi minu seadet juba näinud. See seade mõõtis tarbimisvoolusid igal sisendifaasil ja pingel, saates samaaegselt raadiokanali kaudu andmeid juba paigaldatud Smart Home süsteemi + suutis maja sisendis starteri maha lõigata. Kuid tänane vestlus ei puuduta teda, vaid tema väikest, kuid väga olulist komponenti - vooluandurit. Ja nagu artikli pealkirjast juba aru saite, on need Allegro "kontaktivabad" vooluandurid - ACS758-100.
________________________________________________________________________________________________________________________
Andmelehte näete anduril, millest ma räägin. Nagu võite arvata, on arv "100" märgistuse lõpus maksimaalne vool, mida andur suudab mõõta. Ausalt öeldes - ma kahtlen selles, mulle tundub, et järeldused lihtsalt ei talu 200A pikka aega, kuigi see on üsna sobiv voolu mõõtmiseks. Minu seadmes käib 100A andur endast probleemideta läbi pidevalt vähemalt 35A + on tarbimispiike kuni 60A.
Joonis 1 – Anduri ACS758-100(50/200) välimus
Enne kui asun artikli põhiosa juurde, soovitan teil tutvuda kahe allikaga. Kui teil on algteadmised elektroonikast, on need üleliigsed ja võite selle lõigu vahele jätta. Ülejäänud osas soovitan teil minna üldiseks arendamiseks ja mõistmiseks:
1) Halli efekt. Nähtus ja toimimispõhimõte
2) Kaasaegsed vooluandurid
________________________________________________________________________________________________________________________
Noh, alustame kõige olulisemast, nimelt märgistamisest. Ostan komponente 90% juhtudest www.digikey.com lehelt. Komponendid jõuavad Venemaale 5-6 päevaga, saidil on kõik olemas, olemas on ka väga mugav parameetriline otsing ja dokumentatsioon. Nii et pere andurite täielikku nimekirja saab seal soovi korral vaadata " ACS758". Minu andurid osteti samast kohast - ACS758LCB-100B.
Andmelehel on kõik märgistatud, kuid pööran siiski tähelepanu põhipunktile " 100V":
1) 100
- see on mõõtepiirang amprites, see tähendab, et minu andur võib mõõta kuni 100A;
2) "IN"- siin peaksite pöörama erilist tähelepanu sellele kirjale, selle asemel võib olla ka kiri" U Mõõdik tähega B saab mõõta vahelduvvoolu ja vastavalt ka alalisvoolu. Sensor kirjaga U saab mõõta ainult alalisvoolu.
Samuti on andmelehe alguses selle teema kohta suurepärane plaat: 
Joonis 2 – ACS758 perekonna vooluandurite tüübid
Ka üks olulisemaid põhjusi sellise anduri kasutamiseks oli - galvaaniline isolatsioon. Toiteväljundid 4 ja 5 ei ole elektriliselt ühendatud väljunditega 1,2,3. Selles anduris toimub side ainult indutseeritud välja kujul.
Selles tabelis ilmus veel üks oluline parameeter - väljundpinge sõltuvus voolust. Seda tüüpi andurite ilu seisneb selles, et neil on pingeväljund, mitte vooluväljund nagu klassikalised voolutrafod, mis on väga mugav. Näiteks saab anduri väljundi ühendada otse mikrokontrolleri ADC sisendiga ja võtta näidud.
Minu anduri jaoks on see väärtus 20 mV/A. See tähendab, et kui anduri klemmide 4-5 kaudu voolab vool 1A, suureneb pinge selle väljundis 20 mV. Ma arvan, et loogika on selge.
Kui suur on järgmisel hetkel väljundpinge? Arvestades, et toiteallikas on "inimene", st unipolaarne, peaks vahelduvvoolu mõõtmisel olema "võrdluspunkt". Selles anduris on see võrdluspunkt 1/2 toiteallikast (Vcc). Seda lahendust tuleb sageli ette ja see on mugav. Kui vool liigub ühes suunas, on väljund " 1/2Vcc+I*0,02V", teisel poolperioodil, kui vool liigub vastupidises suunas, on väljundpinge kitsam" 1/2 Vcc - I*0,02V Väljundis saame sinusoidi, kus "null" on 1/2 Vcc. Kui me mõõdame alalisvoolu, siis väljundis on meil " 1/2Vcc+I*0,02V", siis ADC-s andmete töötlemisel lahutame lihtsalt konstantse komponendi 1/2 Vcc ja töötage tõeliste andmetega, st ülejäänud andmetega I*0,02V.
Nüüd on aeg praktikas kontrollida seda, mida ma eespool kirjeldasin või pigem andmelehelt maha lahutasin. Anduriga töötamiseks ja selle võimaluste kontrollimiseks ehitasin selle "mini-aluse":

Joonis 3 – vooluanduri testimise koht
Esiteks otsustasin andurile toite anda ja mõõta selle väljundit, et veenduda, kas see kulus 1/2 Vcc. Ühendusskeemi leiab andmelehelt, aga mina, tahtes lihtsalt tutvust teha, ei raisanud aega ja vormisin Vout kontakti juurde toiteallika filtrikondensaatori + RC madalpääsfiltri ahela. Päris seadmes pole ilma nendeta kusagil! Lõpetasin sellise pildiga:

Joonis 4 – "null" mõõtmise tulemus
Kui toide on rakendatud 5V minu taskurätikust STM32VL avastus Ma nägin neid tulemusi - 2,38 V. Esimene küsimus, mis tekkis, oli: Miks 2.38 ja mitte need, mis on kirjeldatud 2.5 andmelehel?"Küsimus kadus peaaegu hetkega - mõõtsin silumiseks toitebussi ja seal 4,76-4,77 V. Aga asi on selles, et toide tuleb USB-st, seal on juba 5 V, pärast USB on lineaarne stabilisaator LM7805 ja see on ilmselgelt mitte 40 mV langusega LDO. Siin on see umbes 250 mV ja need langevad. Noh, okei, see pole kriitiline, peamine on teada, et "null" on 2,38 V. Ma lahutan selle konstandi andmete töötlemisel ADC-st.
Ja nüüd viime läbi esimese mõõtmise, seni ainult ostsilloskoobi abil. Mõõdan oma reguleeritud toiteallika lühisevoolu, see on võrdne 3,06A. See ja sisseehitatud ampermeeter näitab ja fluke andis sama tulemuse. Noh, ühendame PSU väljundid anduri jalgadega 4 ja 5 (fotol on mul väänamine) ja vaatame, mis juhtus:

Joonis 5 - PSU lühisevoolu mõõtmine
Nagu näeme, pinge vout suurenenud 2,38 V kuni 2,44 V. Vaadates ülaltoodud sõltuvust, oleksime pidanud 2,38V + 3,06A*0,02V/A, mis vastab väärtusele 2,44 V. Tulemus vastab ootustele, voolul 3A saime tõusu "nullini", mis võrdub 60 mV. Järeldus - andur töötab, saate sellega juba MC abil töötada.
Nüüd peate ühendama vooluanduri STM32F100RBT6 mikrokontrolleri ühe ADC-viiguga. Kivike ise on väga kesine, süsteemi sagedus vaid 24 MHz, aga see sall on palju vastu pidanud ja ennast tõestanud. Olen omanud vist 5 aastat, sest sai tasuta sel ajal, kui ST neid paremale ja vasakule jagas.
Alguses tahtsin harjumusest anduri järele koefitsiendiga op-ampi panna. saada "1", kuid struktuuriskeemi vaadates sain aru, et ta oli juba sees. Ainus asi, mida tasub arvestada, on see, et maksimaalse voolu korral on väljundvõimsus võrdne Vcc anduri toiteallikaga, see tähendab umbes 5 V, ja STM võib mõõta vahemikus 0 kuni 3,3 V, nii et antud juhul on see vaja panna takistuslik pingejagur, näiteks 1:1,5 või 1:2. Mu vool on napp, nii et jätan selle hetke praegu tähelepanuta. Minu testseade näeb välja umbes selline:

Joonis 6 - paneme kokku oma "ampermeetri"
Samuti keerasin tulemuste visualiseerimiseks ILI9341 kontrolleri külge Hiina ekraani, kuna see lebas käeulatuses, kuid mu käed ei ulatunud selleni. Talle täieõigusliku raamatukogu kirjutamiseks tapsin paar tundi ja tassi kohvi, kuna andmeleht osutus üllatavalt informatiivseks, mis on Jackie Chani poegade käsitöö puhul haruldane.
Nüüd peate kirjutama funktsiooni Vout mõõtmiseks mikrokontrolleri ADC abil. Ma ei räägi teile üksikasjalikult, STM32-s on juba palju teavet ja õppetunde. Nii et vaatame lihtsalt:
Uint16_t get_adc_value() ( ADC_SoftwareStartConvCmd(ADC1, ENABLE); while(ADC_GetFlagStatus(ADC1, ADC_FLAG_EOC) == RESET); tagastab ADC_GetConversionValue(ADC1); )
Lisaks peate ADC mõõtmise tulemuste saamiseks põhiosa või katkestuse käivitatavas koodis kirjutama järgmise:
andmed_adc = hanki_adc_väärtus();
Olles eelnevalt deklareerinud muutuja data_adc:
extern uint16_t data_adc;
Selle tulemusena saame muutuja data_adc, mis võtab väärtuse vahemikus 0 kuni 4095, kuna STM32 ADC on 12-bitine. Järgmisena peame "papagoides" saadud tulemuse muutma meile tuttavamaks vormiks, see tähendab ampriteks. Seetõttu on vaja kõigepealt välja arvutada jagamise hind. Pärast 3,3 V siini stabilisaatorit näitas mu ostsilloskoop 3,17 V, ma ei saanud aru, millega see seotud oli. Seega, jagades 3,17 V 4095-ga, saame väärtuse 0,000774 V - see on jagamise hind. See tähendab, et olles saanud ADC-lt tulemuse, näiteks 2711, korrutan selle lihtsalt 0,000774 V-ga ja saan 2,09 V.
Meie ülesandes on pinge ainult "vahelüli", peame selle ikkagi ampriteks teisendama. Selleks peame tulemusest lahutama 2,38 V ja jagama ülejäänud osa 0,02 [V/A]-ga. Tulemuseks on valem:
Float I_out = ((((float)data_adc * pressc)-2.38)/0.02);
Noh, on aeg püsivara mikrokontrollerisse üles laadida ja tulemusi näha:

Joonis 7 - Andurilt saadud mõõtmisandmete ja nende töötlemise tulemused
Mõõtsin vooluringi omatarbimist nagu näha 230 mA. Mõõtes sama asja kontrollitud flukega, selgus, et tarbimine oli 201 mA. Noh - ühe komakoha täpsus on juba väga lahe. Selgitan, miks ... Mõõdetud voolu ulatus on 0..100A ehk täpsus kuni 1A on 1% ja täpsus kuni kümnendiku amprini on juba 0,1%! Ja pange tähele, see on ilma vooluringilahendusteta. Olin isegi liiga laisk, et riputada filtreerivaid toitetorusid.
Nüüd pean mõõtma oma toiteallika lühisvoolu (SC). Keeran nuppu maksimaalselt ja saan järgmise pildi:

Joonis 8 – Lühisvoolu mõõtmised
Noh, tegelikult allika enda näidud selle loomuliku ampermeetriga:

Joonis 9 – Väärtus BP skaalal
Tegelikult näitas see 3,09A, kuid pildistamise ajal kuumenes mähis ja selle takistus suurenes ning vool vastavalt langes, kuid see pole nii hirmutav.
Kokkuvõtteks ma isegi ei tea, mida öelda. Loodan, et minu artikkel aitab kuidagi algajaid raadioamatööre nende raskel teekonnal. Võib-olla kellelegi meeldib minu materjali esitusviis, siis saan jätkata perioodiliselt erinevate komponentidega töötamise kohta kirjutamist. Oma soove teemal saate avaldada kommentaarides, püüan arvestada.
Voolutarbimise reguleerimiseks parandage mootorite blokeerimine või süsteemi hädaolukorra väljalülitamine.
 Kõrgepingega töötamine on tervisele ohtlik!
Kõrgepingega töötamine on tervisele ohtlik!
Klemmiploki kruvide ja nende klemmide puudutamine võib põhjustada elektrilöögi. Ärge puudutage tahvlit, kui see on ühendatud majapidamisvõrku. Valmis seadme jaoks kasutage isoleeritud korpust.
Kui te ei tea, kuidas andurit ühendada tavalisest 220 V võrgust töötava elektriseadmega või kahtlete, lõpetage: võite tekitada tulekahju või tappa ennast.
Peate selgelt aru saama seadme tööpõhimõttest ja kõrgepingega töötamise ohtudest.
Video ülevaade
Ühendus ja seadistamine
Andur suhtleb juhtelektroonikaga kolme juhtme kaudu. Anduri väljund on analoogsignaal. Arduino või Iskra JS-iga ühendatuna on mugav kasutada Troyka Shieldi ja neile, kes tahavad juhtmetest lahti saada, sobib Troyka Slot Shield. Näiteks ühendame mooduli kaabli analoogtihvtiga A0 seotud Troyka Shieldi kontaktide rühmaga. Saate oma projektis kasutada mis tahes analoogtihvte. 
Näited töödest
Anduriga töötamise hõlbustamiseks oleme koostanud teegi TroykaCurrent, mis teisendab anduri analoogväljundi väärtused milliampriteks. Laadige alla ja installige see, et korrata allpool kirjeldatud katseid.
Alalisvoolu mõõtmine
Alalisvoolu mõõtmiseks ühendage andur LED-riba ja toiteallika vahelise avatud ahelaga. Väljastame jadaporti alalisvoolu vooluväärtuse milliamprites. 
Vahelduvvoolu mõõtmine
Vahelduvvoolu mõõtmiseks ühendame anduri vahelduvpingeallika ja koormuse vahelise avatud ahelaga. Väljastame jadaporti vahelduvvoolu vooluväärtuse milliamprites. 
Tahvli elemendid

Andur ACS712ELCTR-05B
Vooluandur ACS712ELCTR-05B põhineb Halli efektil, mille olemus on järgmine: kui voolu juhtiv juht asetada magnetvälja, tekib selle servadesse EMF, mis on suunatud voolu suunaga risti ja magnetvälja suund.  Mikroskeem koosneb struktuurilt Halli andurist ja vaskjuhist. Vaskjuhi läbiv vool tekitab magnetvälja, mida tajub Halli element. Magnetväli sõltub lineaarselt voolu tugevusest.
Mikroskeem koosneb struktuurilt Halli andurist ja vaskjuhist. Vaskjuhi läbiv vool tekitab magnetvälja, mida tajub Halli element. Magnetväli sõltub lineaarselt voolu tugevusest.
Anduri väljundpinge tase on võrdeline mõõdetud vooluga. Mõõtevahemik -5 A kuni 5 A. Tundlikkus - 185 mV/A. Voolu puudumisel võrdub väljundpinge poolega toitepingest. 
Vooluandur on ühendatud koormusega avatud ahelas kruvi all olevate padjandite kaudu. Alalisvoolu mõõtmiseks ühendage andur, võttes arvesse voolu suundi, vastasel juhul saate vastupidise märgiga väärtused. Vahelduvvoolu puhul pole polaarsus oluline.
Kontaktid kolmejuhtmelise ahela ühendamiseks
Moodul on kolme juhtme kaudu ühendatud juhtelektroonikaga. Kolmejuhtmelise silmuse kontaktide eesmärk:
Võimsus (V) - punane juhe. Dokumentatsiooni põhjal on anduri toiteallikaks 5 volti. Testi tulemusena töötab moodul ka 3,3 voltist.
Maandus (G) - must juhe. Peab olema ühendatud mikrokontrolleri maandusega;
Signaal (S) - kollane juhe. Ühendatud mikrokontrolleri analoogsisendiga. Selle kaudu loeb juhtplaat anduri signaali.
Erinevate tehnoloogiliste protsesside edukaks automatiseerimiseks, instrumentide, seadmete, masinate ja mehhanismide efektiivseks juhtimiseks on vaja pidevalt mõõta ja juhtida paljusid parameetreid ja füüsikalisi suurusi. Seetõttu on juhitavate seadmete oleku kohta teavet andvad andurid muutunud automaatsüsteemide lahutamatuks osaks.
Oma olemuselt on iga andur reguleerimis-, signaalimis-, mõõtmis- ja juhtimisseadmete lahutamatu osa. Tema abiga muudetakse üks või teine kontrollitav väärtus teatud tüüpi signaaliks, mis võimaldab saadud informatsiooni mõõta, töödelda, registreerida, edastada ja salvestada. Mõnel juhul võib andur mõjutada kontrollitavaid protsesse. Paljudes seadmetes ja mikroskeemides kasutatav vooluandur omab kõiki neid omadusi täielikult. See muudab elektrivoolu mõju signaalideks, mis on mugavad edasiseks kasutamiseks.
Andurite klassifikatsioon
Erinevates seadmetes kasutatavad andurid liigitatakse teatud omaduste järgi. Kui on võimalik mõõta sisendväärtusi, võivad need olla: elektrilised, pneumaatilised, kiirusandurid, mehaanilised nihked, rõhk, kiirendus, jõud, temperatuur ja muud parameetrid. Nende hulgas võtab elektriliste ja magnetiliste suuruste mõõtmine umbes 4%.
Iga andur teisendab sisendväärtuse mõneks väljundparameetriks. Sõltuvalt sellest võivad juhtimisseadmed olla mitteelektrilised ja elektrilised.
Viimastest on kõige levinumad:
- DC andurid
- Vahelduvvoolu amplituudiandurid
- Takistuse andurid ja muud sarnased seadmed.
Elektriliste andurite peamine eelis on võime edastada teavet suurel kiirusel teatud vahemaadel. Digitaalse koodi kasutamine tagab mõõtevahendite suure täpsuse, kiiruse ja suurenenud tundlikkuse.
Tööpõhimõte
Vastavalt tööpõhimõttele on kõik andurid jagatud kahte põhitüüpi. Need võivad olla generaatorid - teisendavad sisendväärtused otse elektrisignaaliks. Parameetrilised andurid hõlmavad seadmeid, mis muudavad sisendväärtused anduri enda muudetud elektrilisteks parameetriteks. Lisaks võivad need olla reostaatilised, oomilised, foto- või optoelektroonilised, mahtuvuslikud, induktiivsed jne.
Kõigi andurite tööks on teatud nõuded. Igas seadmes peavad sisend- ja väljundväärtused olema üksteisega otseselt seotud. Kõik omadused peavad olema aja jooksul stabiilsed. Reeglina iseloomustab neid seadmeid kõrge tundlikkus, väike suurus ja kaal. Need võivad töötada erinevates tingimustes ja neid saab paigaldada mitmel viisil.
Kaasaegsed vooluandurid
Vooluandurid on seadmed, mis määravad alalis- või vahelduvvoolu tugevuse elektriahelates. Nende konstruktsioon sisaldab pilu ja kompensatsioonimähisega magnetsüdamikku ning elektrisignaale töötlevat elektroonilist plaati. Peamine tundlik element on Halli andur, mis on fikseeritud magnetahela pilusse ja ühendatud võimendi sisendiga.
Kõigi selliste seadmete tööpõhimõte on üldiselt sama. Mõõdetud voolu mõjul tekib magnetväli, seejärel genereeritakse Halli anduri abil vastav pinge. Lisaks võimendatakse seda pinget väljundis ja suunatakse väljundmähisesse.
Peamised vooluandurite tüübid:

Otsese võimenduse andurid (O/L). Neil on väike suurus ja kaal, väike energiatarve. Signaali teisenduste valikut on oluliselt laiendatud. Väldib kadusid primaarahelas. Seadme töö põhineb magnetväljal, mis loob primaarvoolu IP. Järgmisena koondub magnetväli magnetahelasse ja selle edasine teisendamine Halli elemendi poolt õhupilus. Halli elemendilt saadud signaali võimendatakse ja väljundis moodustub primaarvoolu proportsionaalne koopia.

Vooluandurid (Eta). Neid iseloomustab lai sagedusvahemik ja laiendatud konversioonivahemik. Nende seadmete eelisteks on madal energiatarve ja madal latentsusaeg. Seadme tööd toetab unipolaarne toiteallikas 0 kuni +5 volti. Seadme töö põhineb kombineeritud tehnoloogial, mis kasutab kompensatsioonitüüpi ja otsevõimendust. See aitab oluliselt parandada anduri jõudlust ja tasakaalustatud tööd.

Kompenseerivad vooluandurid (C/L). Neil on lai sagedusvahemik, suur täpsus ja madal latentsusaeg. Seda tüüpi instrumendil puudub esmane signaalikadu, suurepärased lineaarsusomadused ja madala temperatuuri triiv. Primaarvoolu tekitatud magnetvälja kompenseerimine IP, tekib sekundaarmähises moodustunud sama välja tõttu. Sekundaarse kompensatsioonivoolu genereerimine toimub Halli elemendi ja anduri enda elektroonika poolt. Lõppkokkuvõttes on sekundaarvool primaarvoolu proportsionaalne koopia.

Kompensatsioonivoolu andurid (tüüp C). Nende seadmete vaieldamatuteks eelisteks on lai sagedusvahemik, teabe suur täpsus, suurepärane lineaarsus ja vähendatud temperatuuritriiv. Lisaks saavad need instrumendid mõõta jääkvoolusid (CD). Neil on kõrge isolatsioonitase ja väiksem mõju esmasele signaalile. Disain koosneb kahest toroidaalsest magnetahelast ja kahest sekundaarmähist. Andurite töö põhineb ampripöörete kompenseerimisel. Primaarahelast lähtuv väikese väärtusega vool läbib primaartakisti ja primaarmähise.

PRIME vooluandurid. Vahelduvvoolu muundamine kasutab laia dünaamilist ulatust. Seadmel on hea lineaarsus, madalad temperatuurikadud ja puudub magnetiline küllastus. Disaini eeliseks on väikesed mõõtmed ja kaal, kõrge vastupidavus erinevat tüüpi ülekoormustele. Näitude täpsus ei sõltu sellest, kuidas kaabel augus paikneb ja seda ei mõjuta välised väljad. See andur ei kasuta traditsioonilist avatud mähist, vaid puutetundlike trükkplaatidega anduripead. Iga plaat koosneb kahest eraldi õhusüdamikuga mähist. Kõik need on paigaldatud ühele põhilisele trükkplaadile. Anduriplaatidest moodustatakse kaks kontsentrilist ahelat, mille väljunditel summeeritakse indutseeritud pinge. Selle tulemusena saadakse teave mõõdetud voolu amplituudi ja faasi parameetrite kohta.

Vooluandurid (tüüp IT). Neil on suur täpsus, lai sagedusvahemik, madal väljundmüra, kõrge temperatuuri stabiilsus ja madal ülekõla. Nende andurite disainis pole Halli elemente. Primaarvool tekitab magnetvälja, mida täiendavalt kompenseerib sekundaarvool. Väljundis on sekundaarvool primaarvoolu proportsionaalne koopia.
Vooluandurite eelised kaasaegsetes vooluahelates
Vooluanduritel põhinevad kiibid mängivad energia säästmisel suurt rolli. Seda soodustab madal võimsus ja voolutarve. Integraallülitustes ühendatakse kõik vajalikud elektroonilised komponendid. Seadmete omadused paranevad kõvasti tänu magnetväljaandurite ja kogu muu aktiivse elektroonika ühistööle.

Kaasaegsed vooluandurid vähendavad veelgi suurust, kuna kogu elektroonika on integreeritud ühte ühisesse kiibi. See on viinud uute uuenduslike kompaktsete disainilahendusteni, sealhulgas põhirehvi jaoks. Iga uus vooluandur on suurendanud isolatsiooni ja toimib edukalt teist tüüpi elektrooniliste komponentidega.
Uusimad andurite konstruktsioonid võimaldavad neid paigaldada olemasolevatesse paigaldustesse ilma primaarjuhti lahti ühendamata. Need koosnevad kahest osast ja on eemaldatavad, mistõttu on nende osade paigaldamine primaarjuhile lihtne ilma lahtiühendamiseta.
Iga anduri jaoks on olemas tehniline dokumentatsioon, mis kajastab kogu vajalikku teavet, mis võimaldab teha esialgseid arvutusi ja määrata optimaalseima kasutuskoha.